« Изобретение относится к землерой но-транспортным машинам в частн:ост к бульдозерным агрегатам, и может быть использовано для автоматизации процесса разработки грунта. Цель изобретения - повьшение точ ности управления. На чертеже изображена блок-схема предлагаемого устройства, Устройство содержит блок 1 измерения действительной скорости,блок 2 измерения силы тяги, блок 3 умножения измеренных сигналов, блок 4 определения знака производной тяговой мощности, переключатель 5 режима работы, блок 6 коммутации,блок 7 запоминания текущего значения сил тяги, блок 8 сравнения теку1дего и заложенного в память значения силы тяги, блок 9 усиления сигнала сравнения, каскады заглубления 10 и 11 соответственно и выглубления.Блоки 1-6 образуют цепь поиска экстремаль ного режима по тяговой мощности,бло ки с 7-11. образуют цепь стаб шизаций найденного режима по параметру силы тяги. Действительная скорость может быть измерена известными сред ствами, например, с помощью датчика Допплера или применением так называемого метода пятого колеса. Сила тяги может быть измерена, например, с помощью тензометрических дат чиков, установленных на толкающих брусьях или- цапфах крепления рабочего органа. Выходным сигналом блока 3 является текущее значение тяго вой мощности. Здесь могут быть использованы типовые перемножающие блоки, вплоть до микросхемных. Выходной сигнал блока 4 имеет вид тро ичного кода (+1, -1,0) в зависимости от характера изменения тяговой мощности. В качестве блока 4 опреде ления знака производной тяговой мощ ности может быть применено трехпозиционное поляризованное реле. Переключатель 5 режима работы осуществляет следующий алгоритм:при появлении на входе этого блока упо1 шнутых кодов +1 и О, соответствующих возрастанию и постоянству сигнала тяговой мопщости, на выходе блока присутствует сигнал +,при на личии на его входе (убывани тяговой мощности) на выходе присутствует сигнал -. 1 В качестве переключателя 5 режима работы может быть применено двухпо3Hii iOHHoe поляризованное реле, в качестве блока 6 - одна из типовых конструкций управляемых электроконтакторов , Реализация блока 7 может быть основана на известных схемах запоминания, как электромеханических, так и чисто электронных (RC-цепи). Устройство функционирует следующим образом. В процессе начального заглубления на втором выходе переключателя 5 режима работы в соответствии с приведенным алгоритмом появляется сигнал +1, который, поступая на второй вход блока 6 коммутации, включает его, а тот, в свою очередь включает, каскад 10 заглубления. В результате умножения текущих значений действительной скорости агрегата и силы тяги на выходе блока 3 формируется сигнал по тяговой мощности и далее посредством блока 4 вычисляется знак ее производной. Б момент появления на выходе блока 4 кода -1 переключатель 5 согласно алгоритму воздействует на блоки 6 и 7. При этом в блоке 7 происходит запоминание имеющегося в данный момент значения силы тяги, а блок 6 отключает каскад 10 заглубления, блокируя его по сигналу с переключателя 5 вплоть до следующего рабочего цикла.: Таким образом, экстремум тяговой мощности найден и начинает работать цепь стабилизации, которая на этапезаглубления не функционирует, так как на блок 8 сравнения поступает один и тот же сигнал силы тяги, следовательно, рассогласование на его выходе равно нулю и срабатывания каскадов заглубления и выглубления не происходит. Заложенное в блоке 7 значение силы тяги, соответствующее экстремуму тяговой мощности, служит уставкой, с которой сравнивается текущее значение силы тяги. В зависимости от знака отклонения, определяемого блоком 8 сравнения, усилитель 9 включает или каскад 10, или каскад 11. Б зависимости от отклонения (амплитуды) не выходе усилителя 9 появляется соответствующее значение скорости заглубления или выглуб3ления рабочего органа и устранение возникшеТ-о отклонения. Таким образом, производится регу лирование тяговбго режима в ходе разработки грунта. В начале последу кицего рабочего цикла зафиксированно в блоке 7 запоминания значение силы тяги стирается. Ф о р мула изобретени Устройство для автоматического управления рабочим органом землеройно-транспортной машины, содержащее блоки измерения действительной скорости и силы тяги, соединенные с блоком умножения, выход которого подключен к последовательно соединенным блоку определения знака производной тяговой мощности и переклю чателю режима работы, каскады заглу 514 бления и выглубления рабочего органа, отличающееся тем, что, с целью повьшения точности управления, оно снабжено блоками запоминания, сравнения, коммутации и усилителем, при этом выход блока измерения силы тяги подключен к последовательно соединенным блоку сравнения и усилителю, выход последнего соединен с входами каскадов заглубления и выглубления, а выход блока измерения силы тяги соединен с первым входом блока запоминания, выход которого соединен с другим входом блока сравнения, причем первый выход переключателя режима работы подключен к второму входу блока запоминания и к первому входу блока коммутации, а второй выход переключателя - к второму входу блока коммутации, выход которого соединен с каскадом заглубления.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1988 |
|
SU1513091A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1988 |
|
SU1579956A2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1986 |
|
SU1416628A2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1328449A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2131961C1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1979 |
|
SU881225A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1980 |
|
SU994651A2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ В ПРОЦЕССЕ КОПАНИЯ ГРУНТА | 2006 |
|
RU2327010C2 |
Изобретение предназначено для автоматизации процесса разработки грунта и позволяет повысить точность управления рабочим органом (РО). Устр-во содержит блоки 1 и 2 измере.ния действительной скорости машины и сипы тяги (СТ), соединенные с блоiKOM 3 умножения, блок 4 определения ,знака производной тяговой мощности (ТМ), переключатель 5 режима работы, блок 6 коммутации, блок 7 памяти, блок 8 сравнения, усилитель 9, каскады 10 и 11 заглубления и выглубления РО. Блоки 1-6 образуют цепь поиска режима экстремума ТМ, а блоки 711 - цепь стабилизации найденного режима по значению СТ. При изменении знака производной ТМ на противоположный происходит прекращение начального заглубления по команде переключа- теля 5. В этот момент блок 7 фиксирует имеющееся значение СТ и начинает работать цепь стабилизации найденного режима. Блок 8 выделяет сигнал отклонения текущего значения СТ от зафиксированного в блоке 7. Усилитель С/) 9 реализует пропорциональный закон регулирования, выдавая сигнал, пропорциональный отклонению. В зависимости от знака отклонения работает либо каскад 10 заглубления, либо каскад 11 выглубления РО. Перед чалом следующего рабочего цикла за фиксированное ранее в блоке 7 значение СТ стирается. 1 ил. ел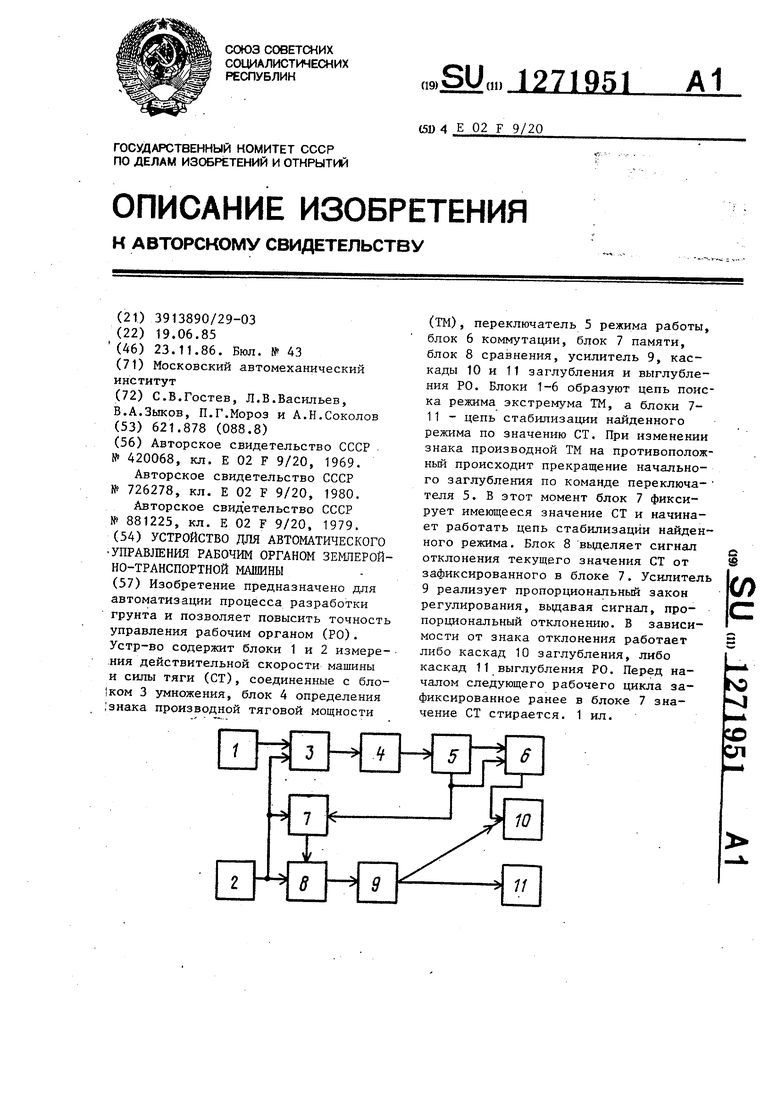
| 1969 |
|
SU420068A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1978 |
|
SU726278A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1979 |
|
SU881225A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
