Изобретение относится к землерой- но-транспортным машинам цикличного ействия, может быть использовано для автоматизации процесса разработки , грунта и является усовершенствованием устройства по авт. св. № 1271951.
Цель изобретения - повышение эффективности управления.
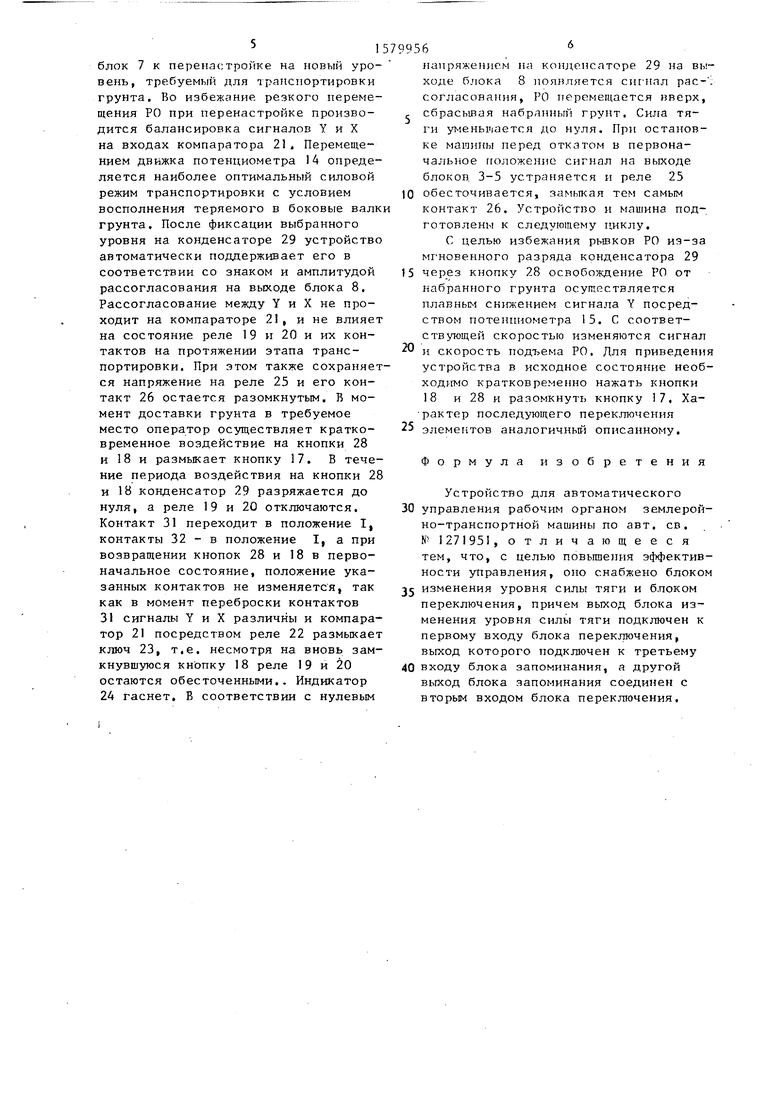
На фиг.1 изображена блок-схема Ю предлагаемого- устройства; на фиг.2 - принципиальная схема блока запоминания, блока изменения уровня силы тяги без датчика определения заполнения рабочего органа.15
Устройство содержит блок 1 измерения действительной скорости машины, блок 2 измерения силы тяги, блок 3 перемножения, блок 4 определения ка производной результата перемноже- 20 ния, переключатель 5 режима работы, блок 6 коммутации, блок 7 запоминания, блок 8 сравнения, блок 9 усиления, каскады заглубления 10 и выглубления 11, блок 12 изменения 25 уровня силы тяги и блок 13 переключения. Выход блока 1 измерения скорости соединен с первым входом блока 3 перемножения, второй вход которого соединен с первым входом блока 7 за- 30 поминания, выходом блока 2 измерения силы тяги, первым входом блока 8 сравнения, выход которого соединен с входом блока 9 усиления, выход которого, в свою очередь, соединен с вхо- -j дами каскадов выглубления 11 и заглубления 10, причем с входом послед- . него соединен выход блока 6 коммутации, первый вход которого соединен с выходом блока 3 перемножения через 40 последовательно соединенные блоки 4 определения знака производной и первый выход переключателя 5 режимов работы, второй выход которого соединен с вторым входом блока 6 коммута- Д5 ции и вторым входом блока 7 запоминания, третий вход которого соединен с выходом блока 12 изменения уровня силы тяги через блок 13 переключения.
Блок 12 изменения уровня силы тяги содержит один основной 14 и два подстроечных 15 и 16 потенциометра для корректировки диапазона изменения. Блок 13 переключения содержит две кнопки 17 и 18, причем первая с фиксацией замкнутого положения, реле 19 и 20 с соответствующими контактами, компаргзтор 21 с управляемым по55
,
5
0 5 0 0 5
5
средством реле 22 ключом 23 и индикатор 24,
Блок 7 запоминания содержит реле 25 с размыкающим контактом 26, ограничивающий резистор 27, кнопку 28, конденсатор 29, повторитель напряжения на основе операционного усилителя 30.
Устройство работает следующим образом.
Установив скоростной режим машины на выбранной передаче оператор формирует на втором выходе блока 5 сигнал д+1, который, поступая на второй вход блока 6 коммутации, включает его, а тот, в свою очередь, включает каскад 10 заглубления. В результате перемножения текущих значений действительной скорости агрегата и силы тяги на выходе блока 3 формируется сигнал по тяговой мощности и далее посредством блока 4 вычисляется знак ее производной . При появлении на выходе блока 4 сигнала -1 (достижение экстремума тяговой мощности) переключатель 5 воздействует на блок 6, тем самым прекращая начальное заглубление. При этом сигнал, свидетельствующий о достижении экстремума тяговой мощности на данной передаче и грунте, с блока 5 поступает на второй вход блока 7. До этого момента конденсатор 29 заряжался до уровня текущего значения силы тяги через размыкающий контакт 26, резистор 27 и переключающий контакт 31, замкнутое состояние которых обусловлено различными сигналами Y и X на входах компаратора 21, что дает размыкание ключа 23 и отсутствие тока через реле 19 и 20. Контакт 32 находится в положении I. Поступление сигнала с блока 5 вызывает срабатывание реле 25 и размыкание контакта 26. На конденсаторе 29 фиксируется сигнал, соответствующий максимуму тяговой мощности, и сохраняется на нем до момента заполнения рабочего органа (РО) благодаря высокому входному сопротивлению компаратора 21 и усилителя 30. На этом этапе.устройство осуществляет автоматическое поддержание текущего значения силы тяги на зафиксированном блоком 7 уровне в соответствии со знаком и амплитудой рассогласования на выходе блока 8. При заполнении РО оператор -замыкает кнопку 17 и подготавливает
блок 7 к перенастройке на новый уровень, требуемый для транспортировки грунта. Во избежание резкого перемещения РО при перенастройке производится балансировка сигналов Y и X на входах компаратора 21, Перемещением движка потенциометра 14 определяется наиболее оптимальный силовой режим транспортировки с условием восполнения теряемого в боковые валк грунта. После фиксации выбранного уровня на конденсаторе 29 устройство автоматически поддерживает его в соответствии со знаком и амплитудой рассогласования на выходе блока 8. Рассогласование между Y и X не проходит на компараторе 21, и не влияет на состояние реле 19 и 20 и их контактов на протяжении этапа транспортировки. При этом также сохраняется напряжение на реле 25 и его контакт 26 остается разомкнутым. В момент доставки грунта в требуемое место оператор осуществляет кратковременное воздействие на кнопки 28 и 18 и размыкает кнопку 17. В течение периода воздействия на кнопки 28 и 18 конденсатор 29 разряжается до нуля, а реле 19 и 20 отключаются. Контакт 31 переходит в положение I, контакты 32 - в положение I, а при возвращении кнопок 28 и 18 в первоначальное состояние, положение указанных контактов не изменяется, так как в момент переброски контактов 31 сигналы Y и X различны и компаратор 21 посредством реле 22 размыкает ключ 23, т.е. несмотря на вновь замкнувшуюся кнопку 18 реле 19 и 20 остаются обесточенными.. Индикатор 24 гаснет, В соответствии с нулевым
напряжением на конденсаторе 29 на выходе блока 8 появляется сигнал рас- , согласования, РО перемещается вверх, сбрасывая набранный грунт. Сила тяги уменьшается до нуля. При остановке машины перед откатом в первоначальное положение сигнал на выходе блоков 3-5 устраняется и реле 25 обесточивается, замыкая тем самым контакт 26. Устройство и машина подготовлены к следующему циклу.
С целью избежания рывков РО из-за мгновенного разряда конденсатора 29 5 через кнопку 28 освобождение РО от набранного грунта осуществляется плавным снижением сигнала Y посредством потенциометра 15. С соответствующей скоростью изменяются сигнал и скорость подъема РО. Для приведения устройства в исходное состояние необходимо кратковременно нажать кнопки 18 и 28 и разомкнуть кнопку 17, Ха- рактер последующего переключения элементов аналогичный описанному.
Формула изобретения
5
Устройство для автоматического управления рабочим органом землерон- но-транспортной машины по авт. св. N1 1271951, о тлич ающе е с я тем, что, с целью повышения эффективности управления, оно снабжено блоком изменения уровня силы тяги и блоком переключения, причем выход блока изменения уровня силы тяги подключен к первому входу блока переключения, выход которого подключен к третьему входу блока запоминания, а другой выход блока запоминания соединен с вторым входом блока переключения.
Ј a
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1271951A1 |
| Устройство определения оптимального режима заглубления рабочего органа землеройно-транспортной машины | 1986 |
|
SU1421835A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1986 |
|
SU1416628A2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1988 |
|
SU1513091A1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1328449A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
| Устройство для управления рабочим органом бульдозера | 1980 |
|
SU978620A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2131961C1 |
| Система управления гидроприводом рабочего органа землеройно-транспортной машины | 1985 |
|
SU1301943A1 |
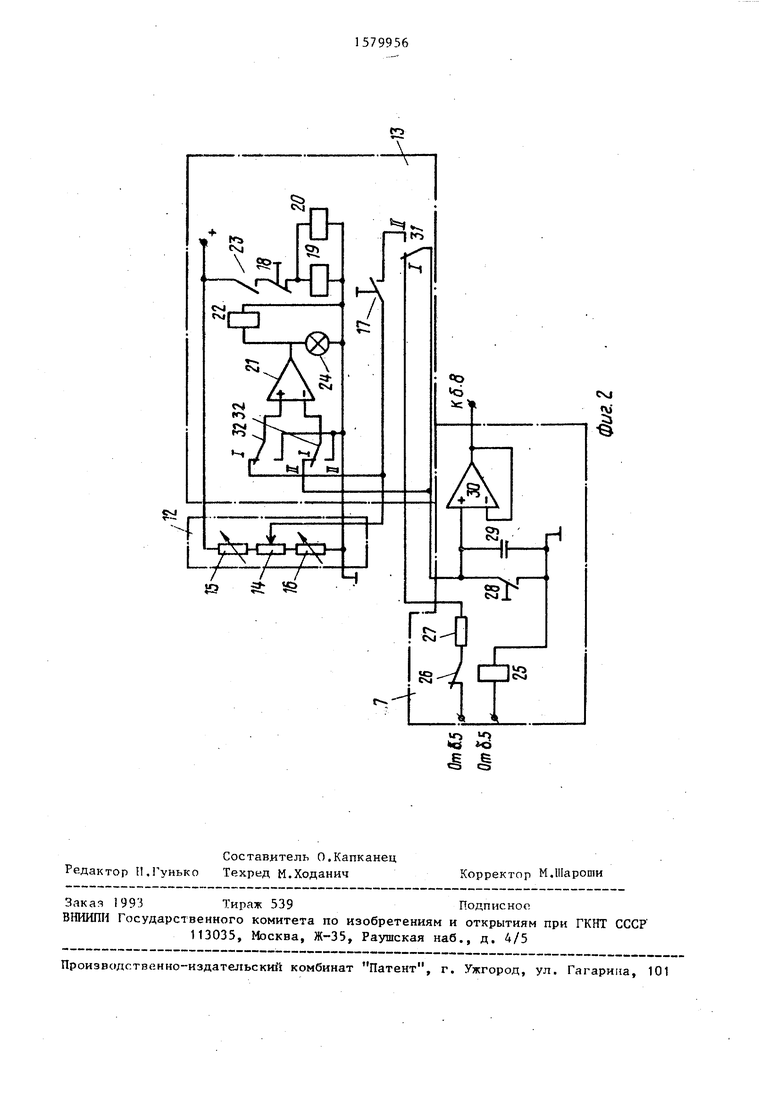
Изобретение относится к землеройно-транспортным машинам цикличного действия и предназначено для автоматизации процесса разработки грунта. Цель - повышение эффективности управления. Устройство содержит блок 1 измерения действительной скорости машины, блок 2 изменения силы тяги, блок 3 перемножения, блок 4 определения знака производной результата перемножения, переключатель 5 режима работы, блок 6 коммутации, блок 7 запоминания, блок 8 сравнения, блок 9 усиления, каскады заглубления 10 и выглубления 11. Дополнительно устройство снабжено блоком 12 изменения уровня силы тяги и блоком 13 переключения. В результате перемножения действительной скорости агрегата и силы тяги на выходе блока 3 формируется сигнал по тяговой мощности и далее посредством блока 4 вычисляется знак ее производной. Через переключатель 5 сигнал поступает на вход блока 7 и через блок 6 на каскад заглубления.При поступлении с блока 5 на блок 7 сигнала устройство осуществляет автоматическое поддержание текущего значения силы тяги на зафиксированном блоком 7 уровне в соответствии со знаком и амплитудой рассогласования на выходе блока 8. Для избежания резкого перемещения рабочего органа при перестройке на новый уровень производят балансировку сигналов на входах блока 13. 2 ил.
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1271951A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
