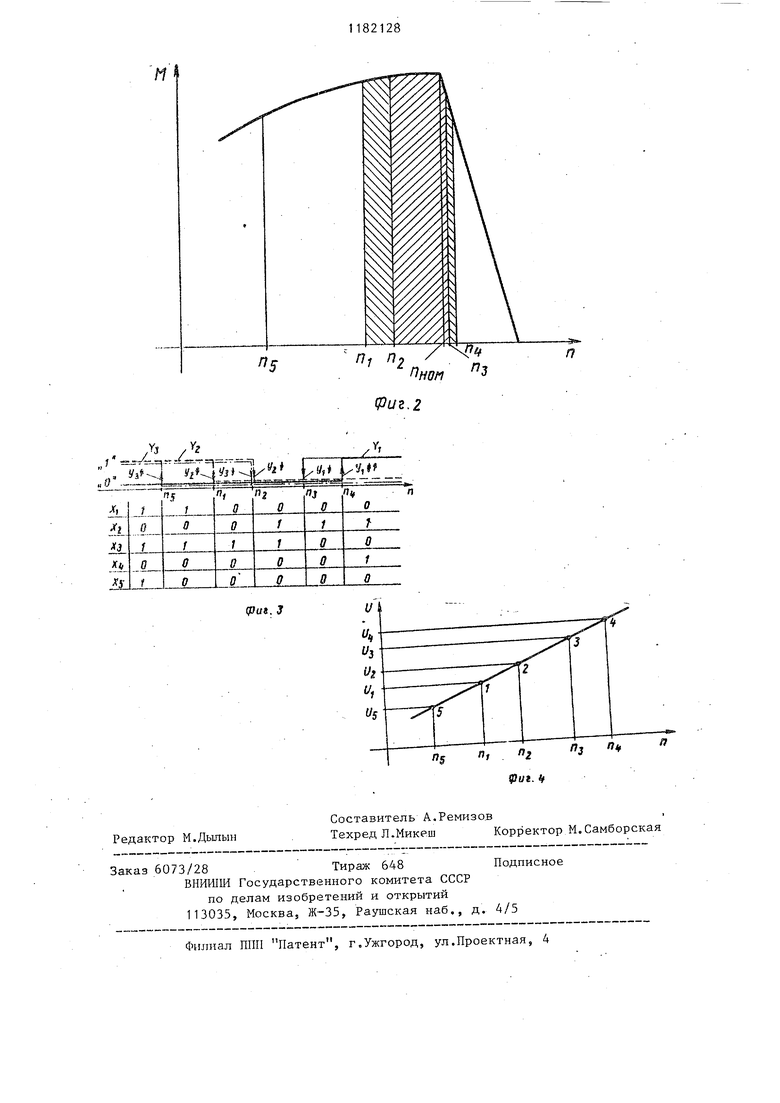
Изобретение относится к системам автоматического управления рабочим органом землеройно-транспортной машины и может быть использовано на -бульдозерах и землеройных машинах. Цель изобретения - обеспечение работы бульдозера в оптимальном режиме . На фиг. 1 изображена блок-схема системы автоматического управления отвалом бульдозера на фиг,2 - регуля торная характеристика дизельного двигателя, на фиг. 3 - зависимость значений выходных сигналов логического блока от входных срггналов блок на фиг. 4 вариант зависимости вы.ходного напряжения датчика от часто ты вращения двигателя. Система (фиг. 1) содержит гидродомк-рат 1 подъема и опускания отвала, трехпозицирнный золотниковьш ра пределитель 2 с электрическим управ леиием, двухпозиционный золотниковый распределитель 3 с электрически управлением,, датчик 4 частоты враще ния двигателя, блок 5 компараторов, логический управляющий блок 6, гидроцилиндр 7 выключения сцепления, датч1п 8 положения рукоятки подачи топлива, блок 9 установки опорных напряжений, логический управляющий блок содержит группу 10 из четырех элементов И, элемент ИЛИ 11, группу 12 из трех триггеров, переключатель 13 режима работы, линии для пе редачи управляющих сигналов опускания отвала 14, подъема отвала 15 и отключения педали сцепления 16, линии для передачи информационных сиг налов о частоте вращения двигателя 17 и положении рукоятки подачи топлива 18.
y,t х,М x.jg,x,,.X5
If.i X,g X SX SX SXjJX|&.Xj&.,X5;
1)3,1.X gX &Xj&X gtXy IX,8. Xj X,S ;
y, Xi&i SXj&x &Xy x. (1)
4, X,g,
IJ,4 X,& X.j&Xj&XjSXjlX,& X.j8. X,,g ..
Так как за пределами оптимальной зоны до момента достижения точек переключения управляющие сигналы должны сохранять свои значения, то синтез логического блока вьшолняют в Виде управлякяцего автомата с памятью. После преобразований и минимизации СБФ С 1 j и с учетом режимов работы системы автоматического управления получают систему функций возбуждения элементов памяти;Компараторы блока 5, элементы И группы 10, элемент ИЛИ 11 и триггеры группы 12 являются типовыми элементами автоматики и вычислительной техники. В качестве датчика 4 частоты вращения двигателя может быть использован тахогенератор. Датчиком 8 положения рукоятки подачи топлива может служить механически связанный с рукояткой ползунковый потенциометр, задающий уровень напряжения на блок 9 опорных напряжений, который в свою очередь можно выполнить в виде делителя напряжения с регулировкой уровня напряжения на каждом из выходов. I На регуляторной характеристике (фиг. 2) участок кривой между точками п и п соответствует оптимальному режиму работы машины. Участки и п соответствуют допустимым отклонениям частоты вращения двигателя, при нарушении которых требуется подавать управляющие сигналы на выглубление и заглубление отвала соответственно. При резком падении оборотов ниже точки п (при встрече рабочего оборудования с препятствием 1и т.п.) необходимо выключать сцепление. Длительность действия сигналов подъема и опускания отвала и выключе ния сцепления определяется моментом достижения участка ng - Пд. Выполнение заданного по регуляторной характеристике закона управления иллюстрирует зависимость значений выходных сигналов логического блока 6 от входных сигналов этого же блока (фиг. 3). На основании этой зависимости закон функционирования управляющего автомата может быть вьфаясен в виде системы булевых функций (СБФ): yj yj & In У, yjif УэИ x,j&x,& Авт.Ручн. На основании системы (2) вьтоднен синтез логического блока 6. По зависимости выходного напряжения датчика от частоты вращения двигателя (фиг. 4) для значений п, п, п, п, п определяются значения и,, Uj, и, U4 и Uj , которые определяют величину опорных напряжений блока 9. опГ и 4 on5 Тогда входные сигналы логического блока 6, получаемые на выходах компараторов 1-5, должны иметь следующие значения: i ,при и 5 и о,при и и при и и при и - Щ Система управления работает следу ющим образом. Сигнал, пропорциональный частоте вращения двигателя, поступает с датчика 4 на вторые входы компарато- ров 1-5 блока 5, На первые входы ком дараторов подаются опорные напряжения и,, у и и и Upnj с -выходов 1-5 блока опорных напряжений 9. Значения напряжений на выходах блока выставляются на основании регуляторной характеристики (фиг. 2) конкретного двигателя и выбранного типа датчика (фиг. 4). С выходов компа раторов блока 5 сигналы х , х , Xj, х и X поступают на входы элементов И группы 10. Если переключатель режима находится в положении Авт., что соответствует режиму автоматического управления бульдозера, то с первого подвижного контакта переключателя на элементы И подается уровень единицы и разрешается вьздача с выходов первого, второго и четвертого элементов И группы 10 сигналов ус тановки соответственно первого, второго и третьего триггеров группы 12 в единичное состояние, с выхода третьего элемента И группы 10 сигнала на установку всех триггеров группы в нулевое состояние, а на второй вход элемента ИЛИ 11 подается уровен 84 нуля с второго подвижного контакта переключателя. При переводе переклю-, чателя 13 режима работы в положение Ручн., что соответствует переходу на ручное управление бульдозером, первьй подвижный контакт переключателя замыкается на уровень нуля и блокирует элементы И группы 10, а второй подвижный контакт замыкается н4 уровень единицы и устанавливает через элемент ИЛИ 11 в нулевое состояние все триггеры группы 12, Таким образом, в положении ,Ручн. не может быть вьщано никаких управляющих сигналов на соленоиды и управление отвалом выполняет оператор. Переход в режим автоматического управления рабочим органом может быть вьтолнен оператором с предварительным заглублением отвала или без него путем перевода переключателя 13 режима в положение Авт., При таком положении переключателя 13 управление отвалом вьшолняется в соответствии с законом управления, представленным на фиг. 3. Если нагрузка на рабочее оборудование невелика и частота вращения двигателя превышает значение п/(,то по сигналу у с прямого выхода первого триггера группы 12 на соленоид S, первый золотниковый распределитель 2 включается на заглубление отвала посредством гидроцилиндров 1. При зтом частота вращения двигателя начинает снижаться и при значении п сигнал Y( отключается, а распределитель 2 переключается в нейтральное положение. С возрастанием нагрузки, в случае падения частоты вращения двигателя ниже значения п, с прямого выхода второго триггера группы 12 подается сигнал Y2 на соленоид Sg и первый золотниковый распределитель 2 включается на выглубление отвала посредством гидроцилиндров 1. Нагрузка на двигатель начинает падать, и частота вращения двигателя поднимается до значения nj, при достижении которого снимается сигнал и распределитель 2 вновь переключается в нейтральное положение. Таким образом, система стремится поддерживать нагрузку на рабочее оборудование на уровне, при котором частота вращения двигателя находится в пределах п - п, что позволяет обеспечивать оптимальный тягово-зкономический режим. В случае наезда на
непреодолимое препятствие происходит интенсивное снижение частоты вращения вала двигателя ниже значения п, по доотижении которого с прямого выхода третьего триггера группы 12 вьщается сигнал Y на соленовд S, и второй золотниковый распределитель 3 включается на выключение сцепления посредством гидроцилиндра 7. Одновременно с этим выдается также сигнал YL на подъем отвала. Если оператор не считает нужным вмешиваться в работу системы и не переходит на режим ручного управления, то при достижении оптималь)юй зоны частоты вращения двигатели сигналы Yj и Y автоматически отключаются, первый золотниковьш распределитель 2 устанавливается с нейтральное положение, а вто15ой золотниковый распределитель 3 устанавливается на слив гидроцилиндра 7, включается сцепление и возобновляется движение бульдозера, в противном случае система вновь автоматичб ски .отключает сцепление и выполняет подъем отвала. В процессе работы бульдозера в режиме автоматического управления оператор задавать по своему усмотрению положение рукоятки подачи топлива. За счет наличия связи датчика 8 с блоком 9 опорных напряжений обеспечивается выбор участка регулирования для каждой из регуляторных характеристик, соответствующих максимальному значению крутящего момента для каждого конкретного положения рукоятки подачи топлива. Рукоятка ручного управления . подъемом и опусканием отвала (не показан) механически связана с золотником первого .распределителя 2 и при автоматическом управлении отвалом перемещается в положение, соответствующее выполняемому отвалом действию. Блокировка рукоятки не требуется.
Установка всережимного регулятора на тракторных двигателях обеспечивает режим работы двигателя при минимальном удельном расходе топлива. Однако в процессе копания грунта из-за того,что оператор не может точ|но регулировать загрузку двигателя, он может работать на корректорной
5 ветви, что приводит к повышенному расходу топлива, или на нижней части регуляторной ветви, что приводит к снижению крутящего момента. Поэтому автоматическое регулирование нагрузQ ки на двигатель, в пределах,соответствующих оптимальному тягово-экономическому режиму, посредством заглубления и выглубления рабочего органа приводит к оптимизации режима работы
5 бульдозера как по критерию топливной экономичности, так и но крутящему моменту. Наличие системы, выключающей сцепление, позволяет избежать перегрузок двигателя при встрече рабочего органа с непреодолимьш препятствием.
Предлагаемая система автоматического 5Т1равления отвалом бульдозера позволяет значительно уменьшить число ручных управляющих воздействий на рукоятки управления землеройной машины, облегчает условия труда оператора, снижает его утомляемость,, повышается
0 производительность машины, стабилизируется загрузка двигателя, трансмисрии и рабочего оборудования.
блок установки опорных напряжет/г
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления рабочим процессом землеройно-транспортной машины | 1985 |
|
SU1283313A1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1328449A1 |
| Система автоматического управления рабочим органом транспортной машины | 1977 |
|
SU940651A3 |
| Автоматический тормозной привод колесной машины | 1990 |
|
SU1713843A1 |
| Бульдозерный агрегат | 1979 |
|
SU910943A1 |
| ЭЛЕКТРОННО-ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ОТВАЛОМ БУЛЬДОЗЕРА | 2016 |
|
RU2624079C1 |
| Система автоматического управления фрикционным сцеплением транспортной машины | 1990 |
|
SU1781098A1 |
| Устройство для управления вентильным двигателем циклоконверторного типа (его варианты) | 1983 |
|
SU1137562A1 |
| Тренажер оператора энергетического объекта | 1978 |
|
SU752457A1 |
| Устройство для управления процессом копания бульдозером | 1981 |
|
SU1048877A1 |
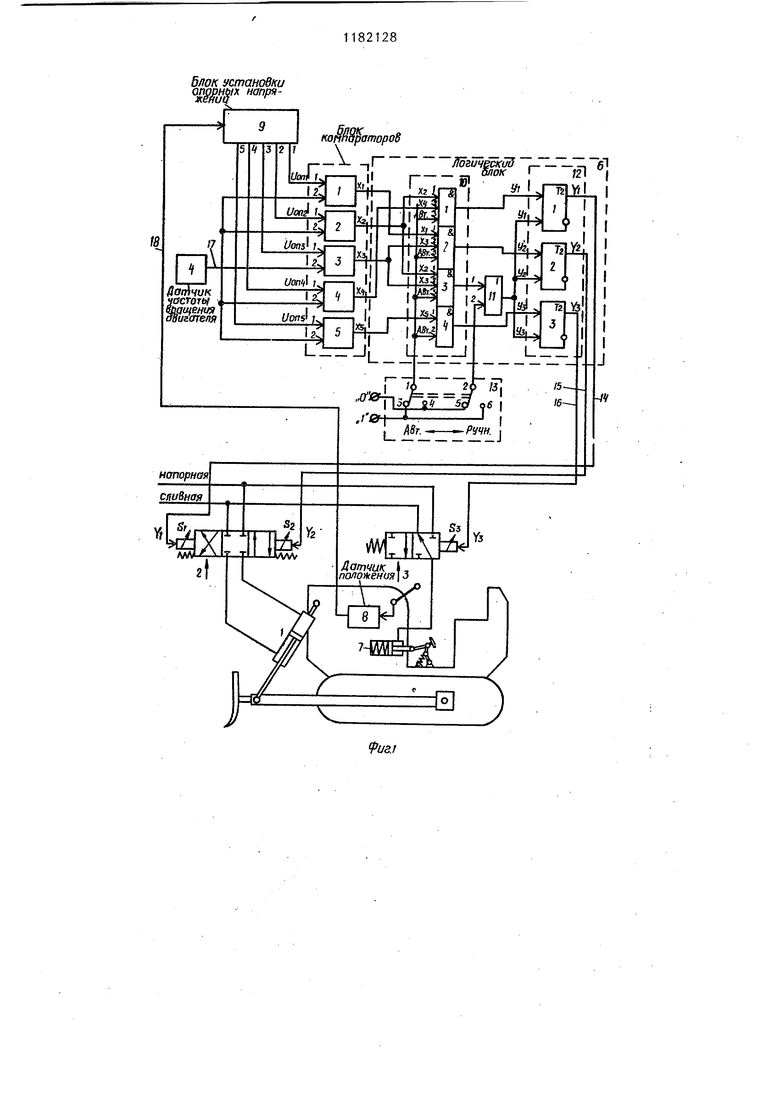
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОТВАЛОМ БУЛЬДОЗЕРА, содержащая датчик частоты вращения двигателя, логический управляющий блок, первый и второй выходы которого подключены к управляющим входам трехпозиционного золотникового распределителя с электрическим управлением, соединенного с гидродомкратом подъема-г-опускания отвала, третий выход логического управляющего блока подключен к управляющему входу двухпозиционного золотникового распределителя с электрическим управлением, переключатель ручного и автоматического управления, выходы которого подключены к входам логического управляющего блока, датчик положения рукоятки подачи топлива, о т- личающаяся тем, что, с целью обеспечения работы бульдозера в оптимальном режиме, она снабжена блоком установки опорнЕ 1х напряжений, блоком компараторов и гидроцилиндром выключения сцепления, выходы блока установки опорных напряжеi ний подключены к соответствующим установочным входам блока компара(Л торов, к входу блока установки опорС ных напряжений подключен выход датчика положения рукоятки подачи топлива, выход датчика частоты враще- ния двигателя подключен к основным входам блока компараторов, выходы которого подключены к соответствующим входам логического управляющего блока, выход двухпозиционного золотникового распределителя с электрическим управлением подключен к гидроцилиндру выключения сцепления.
(Риг. J
| Автоматическое регулирование процесса копания грунта бульдозерами и скреперами | |||
| Харьков, 1963, с | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Система управления бульдозерным агрегатом | 1980 |
|
SU870614A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
