(21)4226249/24-28
(22)08.04.87
(46) 07.09.88. Бюл. № 33 .
(71)Московский авиационный технологический институт им. К. Э. Циолковского
(72)В. М. Суминов, Е. И. Гребенюк, А. Д. Витман и Е. Б. Зайченкова
(53)531.7(088.8)
(56)Авторское свидетельство СССР № 938010, кл. G 01 В 11/30, 1982.
(54)УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КАЧЕСТВА ПОВЕРХНОСТИ ЦИЛИНДРИЧЕСКИХ ОТВЕРСТИЙ
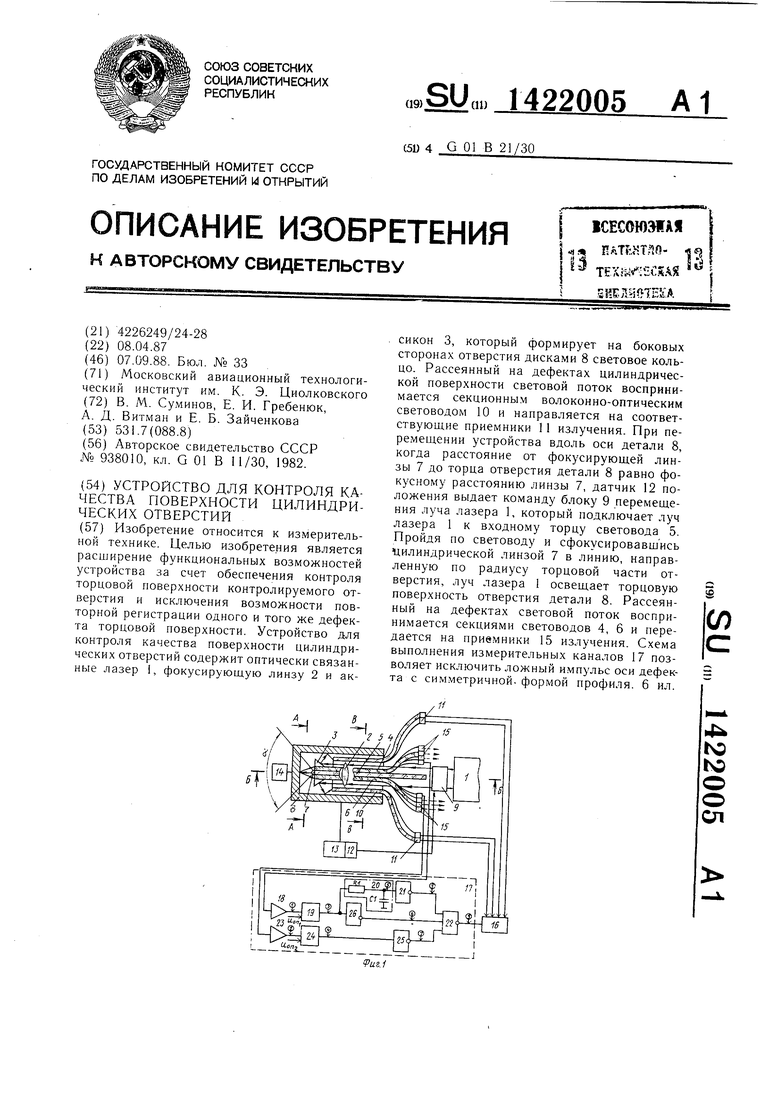
(57)Изобретение относится к измерительной технике. Целью изобретения является раси;ирение функциональных возможностей устройства за счет обеспечения контроля торцовой поверхности контролируемого отверстия и исключения возможности повторной регистрации одного и того же дефекта торцовой поверхности. Устройство для контроля качества поверхности цилиндрических отверстий содержит оптически связанные лазер I, фокусирующую линзу 2 и аксикон 3, который формирует на боковых сторонах отверстия дисками 8 световое кольцо. Рассеянный на дефектах цилиндрической поверхности световой поток воспринимается секционным волоконно-оптическим световодом 10 и направляется на соответствующие приемники 11 излучения. При перемещении устройства вдоль оси детали 8, когда расстояние от фокусирующей линзы 7 до торца отверстия детали 8 равно фо- кусно.му расстоянию линзы 7, датчик 12 положения выдает команду блоку 9 перемещения луча лазера 1, который подключает луч лазера 1 к входному торцу световода 5. Пройдя по световоду и сфокусировавщись цилиндрической линзой 7 в линию, направленную по радиусу торцовой части отверстия, луч лазера 1 освещает торцовую поверхность отверстия детали 8. Рассеянный на дефектах световой поток воспринимается секциями световодов 4, 6 и передается на приемники 15 излучения. Схема выполнения измерительных каналов 17 позволяет исключить ложный и.мпульс оси дефекта с симметричной, формой профиля. 6 ил.
сл
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля качества наружной резьбы | 1991 |
|
SU1803735A1 |
| Устройство для контроля качества поверхности цилиндрических отверстий | 1980 |
|
SU938010A1 |
| Система для контроля качества внутренних поверхностей | 1985 |
|
SU1298546A1 |
| Устройство для контроля дефектов плоских поверхностей | 1987 |
|
SU1476358A2 |
| Устройство контроля профиля поверхности | 1986 |
|
SU1404820A1 |
| Способ контроля дефектов поверхности тел вращения | 1984 |
|
SU1290064A1 |
| Устройство для контроля дефектов поверхности | 1986 |
|
SU1357706A1 |
| Устройство для контроля качества поверхности цилиндрических отверстий | 1989 |
|
SU1714351A1 |
| Устройство для контроля шероховатости поверхности | 1986 |
|
SU1352202A1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СТРЕЛКОВЫЙ ТРЕНАЖЕР КОЛЛЕКТИВНОГО БОЯ | 2002 |
|
RU2211433C1 |
1 to ю
ел
Изобретение относится к измерительной технике и может быть использовано для контроля качества поверхности цилиндрических отверстий.
Целью изобретения является расширение функциональных возможностей устройства за счет обеспечения контроля торцовой поверхности контролируемого отверстия и исключения возможности повторной регистрации одного и того же . дефекта торцовой поверхности.
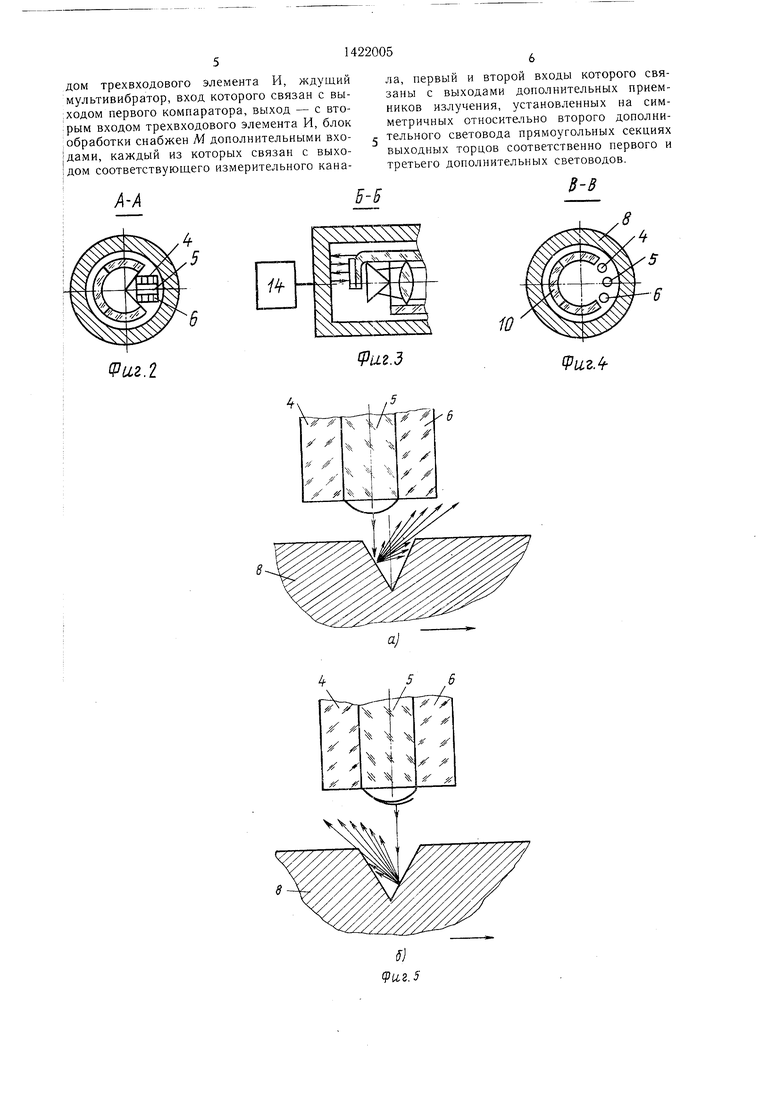
На фиг. 1 представлена функциональная схема устройства; на фиг. 2-4 г- разрезы А-А, Б-Б, В-В на фиг. 1 соответственно; на фиг. 5 - моменты взаимодействия излучения лазера с дефектом торцовой поверхности; на фиг. 6
рическим входом блока 9 перемещения луча лазера 1, 2М дополнительных приемников 15 излучения, установленных на соответствующих секциях выходных торцов первого и третьего дополнительных светово дов 4 и 6, блок 16 обработки с N основными входами, каждый из которых связан с выходом соответствующего приемника 11 излучения и М дополнительными входами, М идентичных измерительных каналов 17,
10 каждый из которых содержит последовательно связанные первый усилитель 18, вход которого является первым входом соответствующего измерительного канала 17, первый компаратор 19, интегрирующую цепь 20, первый инвертор 21 и трехвходовой элемент
, 1гг
диаг- И 22, выход которого является выходом раммы напряжений в различных точках уст-соответствующего измерительного канала 17,
ройства.последовательно связанные второй усилитель
Устройство содержит оптически связан-23, вход которого является вторым входом
ныё лазер 1, фокусирующую линзу 2 и акси- соответствующего измерительного канала кон 3, установленный верщиной навстречу 20 17, второй компаратор 24 и второй инвертор излучению лазера 1, три дополнительных 25, выход которого связан с третьим входом трехвходового элемента И 22, ждущий мультивибратор 26, вход которого связан с
параллельных световода 4-6, первый и третий световоды 4 и 6 из которых расположены симметрично относительно второго
выходом первого компаратора 19, выход - с
дополнительного световода 5 и которые ус- вторым входом трехвходового элемента И 22, тановлены в полости аксикона 3, представ- .-. ..- л-
ляющей собой часть объема аксикона 3, при этом основанием ее является 90° сектор основания аксикона 3, а боковые стороны выполнены по образующим аксикона 3, плоскости входных торцов первого и третьего дополнительных световодов 4 и 6 и выходного торца второго дополнительного световода 5 расположены в плоскости основания аксикона 3 и имеют вид прямоугольников, длинные стороны которых параллельны радиусу основания аксикона 3, входные и выходные торцы первого и третьего дополнительных световодов 4 и 6 выполнены в виде М прямоугольных секций, входной торец второго дополнительного световода 5 установлен перпендикулярно оптикаждый из М дополнительных входов блока 16 обработки связан с выходом соответствующего измерительного канала 17, первый и второй входы которого связаны с выходами дополнительных приемников 15 излу- эп чения, установленных на симметричных относительно второго дополнительного световода 5.прямоугольных секциях выходных торцов соответственно первого и третьего дополнительных световодов 4 и 6.
Устройство работает следующим образом.
Луч лазера 1 фокусируется линзой 2 на поверхности контролируемого отверстия, формируясь при этом с помощью аксикона 3 в световое кольцо, освещающее 3/4 периметра отверстия, 1/4 периметра закрыта свеческой оси лазера 1, дополнительную фоку- 40 товодами 4-6 и поэтому при перемещении
сирующую цилиндрическую линзу 7, образующая которой параллельна радиусу основания аксикона 3 и которая установлена на выходном торце второго дополнительного световода 5 между этим торцом и торустройства внутри детали контролируется лишь 3/4 периметра. Рассеянный на дефектах цилиндрической поверхности световой поток воспринимается секционным волоконно-оптическим световодом 10 н направляцовой поверхностью отверстия детали 8, блок ется на соответствующие приемники 11 из9 перемещения луча лазера 1, установленный между лазером 1 и входным торцом второго дополнительного световода 5, кольцевой световод 10, входной и выходной торцы которого выполнены в виде N кольцевых секций, N приемников 11 излучения, каждый из которых связан с соответствующей кольцевой секцией выходного торца световода 10, датчик 12 положения, связываемый с приводом 13. перемещения устройства вдоль оси детали зывается с приводом 14 вращательного движения детали 8 относительно оси лазера 1, выход датчика 12 связан с элект50
лучения. Сканирование поверхности осуществляется при поступательном перемещении устройства вдоль оси детали, которое обеспечивается любым известным приводом 13. Когда устройство переместится так, что расстояние от фокусирующей линзы 7 до торца отверстия детали 8 будет равно фокусному расстоянию линзы, что обеспечивается любым известным датчиком 12 положения, блок 9 перемещает луч ла- которая свя- 55 зера 1 параллельно самому себе на входной торец световода 5. Пройдя по световоду и сфокусировавшись цилиндрической линзой 7 в линию, направленную по ра2005
2
рическим входом блока 9 перемещения луча лазера 1, 2М дополнительных приемников 15 излучения, установленных на соответствующих секциях выходных торцов первого и третьего дополнительных светово дов 4 и 6, блок 16 обработки с N основными входами, каждый из которых связан с выходом соответствующего приемника 11 излучения и М дополнительными входами, М идентичных измерительных каналов 17,
10 каждый из которых содержит последовательно связанные первый усилитель 18, вход которого является первым входом соответствующего измерительного канала 17, первый компаратор 19, интегрирующую цепь 20, первый инвертор 21 и трехвходовой элемент
, 1гг
И 22, выход которого является выходом соответствующего измерительного канала 17,
выходом первого компаратора 19, выход - с
вторым входом трехвходового элемента И 22, .-. ..- л-
вторым входом трехвходового элемента И 22, .-. ..- л-
каждый из М дополнительных входов блока 16 обработки связан с выходом соответствующего измерительного канала 17, первый и второй входы которого связаны с выходами дополнительных приемников 15 излу- чения, установленных на симметричных относительно второго дополнительного световода 5.прямоугольных секциях выходных торцов соответственно первого и третьего дополнительных световодов 4 и 6.
Устройство работает следующим образом.
Луч лазера 1 фокусируется линзой 2 на поверхности контролируемого отверстия, формируясь при этом с помощью аксикона 3 в световое кольцо, освещающее 3/4 периметра отверстия, 1/4 периметра закрыта световодами 4-6 и поэтому при перемещении
устройства внутри детали контролируется лишь 3/4 периметра. Рассеянный на дефектах цилиндрической поверхности световой поток воспринимается секционным волоконно-оптическим световодом 10 н направляется на соответствующие приемники 11 из50
55
диусу торцовой части отверстия, луч лазера освещает торцовую поверхность детали 8. Рассеянный на дефектах торцовой части отверстия световой поток воспринимается
секциями входных торцов световодов 4 и 6. ших данной технологии обработки. Установка двух симметричных приемных
симых дефекта. Значение Т определяется индивидуально для каждой детали 8 экспериментальным путем и зависит, как правило, от параметров ансамбля дефектов, присусветоводов 4 и б способствует повышению надежности контроля за счет возможности регистрации дефектов с несимметричным сечением профиля. Выполнение световодов 4 и 6 секционными ведет к повышению чувствительности контроля благодаря дифференциации в оценке светового потока. Регистрация рассеянного светового потока выполняется приемниками 15 излучения.
Формула изобретения
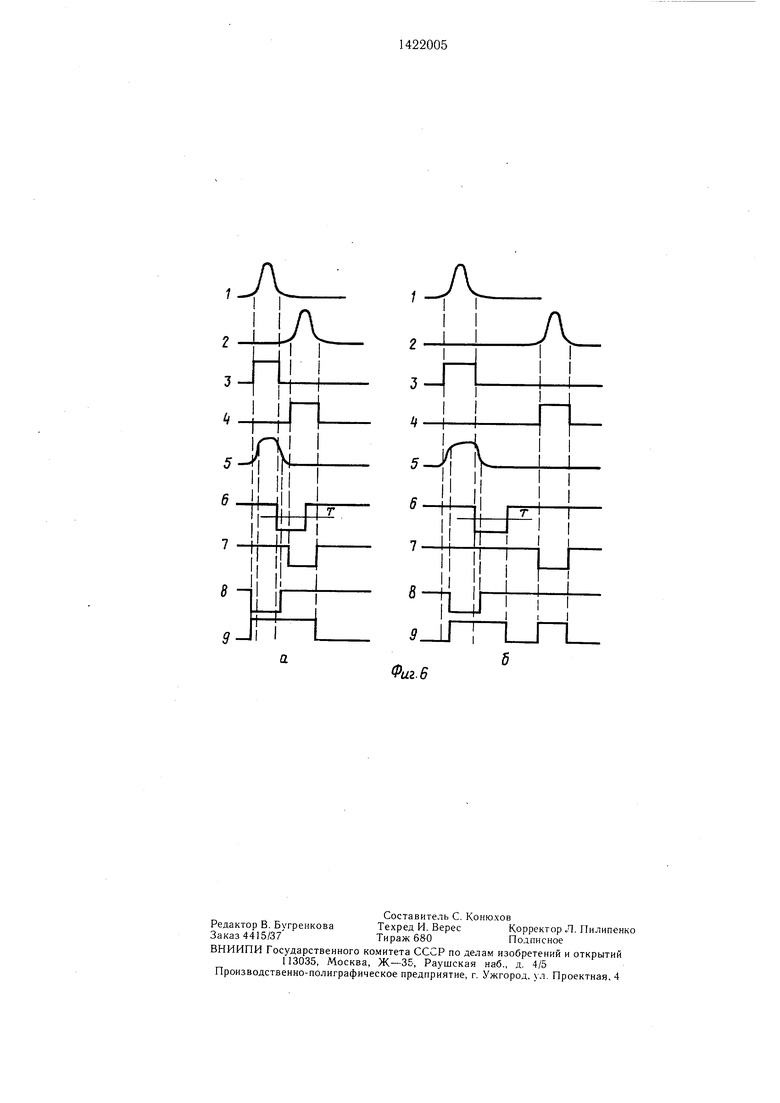
Устройство для контроля качества поверхности цилиндрических отверстий, содержащее опт11чески связанные лазер, фокуси- 0 руюндую линзу, аксикон, установленный вершиной навстречу излучению лазера, световод, входной и выходной торцы которого выполнены в виде N кольцевых секций и N приемников излучения, каждый из коОднако, при наличии на поверхности де- 5 торых связан с соответствующей кольцефектов с симметричной формой профиля от одного и того же дефекта световые импульсы воспринимаются симметричными секциями световодов 4 и 6, поскольку на каждую секцию последовательно попадают
вой секцией выходного торца световода, блок обработки, входы которого связаны с выходами приемников излучения, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено тресветовые потоки от каждой из внутренних 20 мя дополнительными параллельными светограней дефекта (фиг. 3). В этом случае один дефект, представленный импульсами на двух приемниках 15 излучения, следующими через время Т, воспринимается в виде двух от водами, первый и третий из которых расположены симметрично относительно второго дополнительного световода, установленными в плоскости аксикона так, что плоскости
дельных дефектов. Для исключения такой 5 входных торцов первого и третьего дополвозможности и повышения достоверности контроля электронная часть устройства работает следующим образом. На выходе симметричных приемников 15 излучения возникают импульсы напряжения, которые усиливаются соответственно усилителями 18 и 23. На выходах компараторов 19 и 24, входы которых соединены с выходами соответствующих усилителей, образуются импульсы прямоугольной формы, совпадающие по времени с исходными световыми имнительных световодов и выходного торца второго дополнительного световода расположены в плоскости основания аксикона и имеют вид Прямоугольников, длинные стороны которых параллельны радиусу осно- 30 вания аксикона, входные и выходные торцы первого и третьего дополнительных световодов выполнены в виде Д- прямоугольных секций, входной торец второго дополнительного световода установлен перпендикулярно оптической оси лазера, дополнительной
пульсами. Задний фронт импульса, возни- з5 фокусирующей цилиндрической линзой, об40
кающего на выходе компаратора 19 (фиг. 2), запускает ждущий мультивибратор 26, который вырабатывает импульс отрицательной полярности, длительность которого Т равна максимально возможному времени между двумя исходными импульсами, возникающими от одного дефекта. Импульс с выхода компаратора 19 задерживается интегрирующей цепью 20 (RICI) и затем инвертируется инвертором 21. Импульс, возникающий на выходе компаратора 24, инвер- . тируется инвертором 25. Затем импульсы с выходов инверторов 21 и 25 и ждущего мультивибратора 26 поступают на входы элемента 22 И. Если время между исходными импульсам|1 меньще Т, на выходе элеразующая которой параллельна радиусу основания аксикона н которая установлена на выходном Торце второго дoпOv нliтeльнo- го световода, блоко.м перемещения луча лазера, установленным между лазером и входным торцом второго дополнительного световода, датчиком положения, выход которого связан с электрическим входом блока перемещения луча лазера, 2/И дополнительными приемниками излучения, установленными на соответствующих секциях выходных торцов первого и третьего дополнительных световодов, М идентичными измерительными каналами, каждый из которых содержит последовательно связанные первый
усилитель, вход-. которого является первы.м мента И 22 возникает одиночный импульс о входом соответствуюпаего измерительного ка- положительной полярности, передний фронтнала, первый компаратор, интегрируюи1ую
которого совпадает с передним фронтомцепочку, первый инвертор и трехвходовый
импульса с усилителя 18, а задний фронт -элемент И, выход которого является выходом
соответствующего измерительного кана.ча, последовательно связанные второй уси/шс задним фронтом импульса с усилителя 23 (фиг. 3 а). Если время между исходными
импульсами больше Т, на выходе элемента 55 тель, вход которого является вторым вхоИ 22 возникают два импульса напряжения положительной полярности (фиг. 3 б), т.е. блок 16 обработки регистрирует два незавидом соответствующего измерительного канала, второй компаратор и второй инвертор, выход которого связан с третьим вхосимых дефекта. Значение Т определяется индивидуально для каждой детали 8 экспериментальным путем и зависит, как правило, от параметров ансамбля дефектов, присуших данной технологии обработки.
Формула изобретения
Устройство для контроля качества поверхности цилиндрических отверстий, содержащее опт11чески связанные лазер, фокуси- руюндую линзу, аксикон, установленный вершиной навстречу излучению лазера, световод, входной и выходной торцы которого выполнены в виде N кольцевых секций и N приемников излучения, каждый из ковой секцией выходного торца световода, блок обработки, входы которого связаны с выходами приемников излучения, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено тре водами, первый и третий из которых расположены симметрично относительно второго дополнительного световода, установленными в плоскости аксикона так, что плоскости
5 входных торцов первого и третьего дополнительных световодов и выходного торца второго дополнительного световода расположены в плоскости основания аксикона и имеют вид Прямоугольников, длинные стороны которых параллельны радиусу осно- 30 вания аксикона, входные и выходные торцы первого и третьего дополнительных световодов выполнены в виде Д- прямоугольных секций, входной торец второго дополнительного световода установлен перпендикулярно оптической оси лазера, дополнительной
0
разующая которой параллельна радиусу основания аксикона н которая установлена на выходном Торце второго дoпOv нliтeльнo- го световода, блоко.м перемещения луча лазера, установленным между лазером и входным торцом второго дополнительного световода, датчиком положения, выход которого связан с электрическим входом блока перемещения луча лазера, 2/И дополнительными приемниками излучения, установленными на соответствующих секциях выходных торцов первого и третьего дополнительных световодов, М идентичными измерительными каналами, каждый из которых содержит последовательно связанные первый
дом соответствующего измерительного канала, второй компаратор и второй инвертор, выход которого связан с третьим входом трехвходового элемента И, ждущий мультивибратор, вход которого связан с выходом первого компаратора, выход - с вто- фым входом трехвходового элемента И, блок Iобработки снабжен М дополнительными вхо- ;дами, каждый из которых связан с выхо- 1дом соответствующего измерительного кана А-А5-5
(Риг.2
ла, первый и второй входы которого связаны с выходами дополнительных приемников излучения, установленных на симметричных относительно второго дополнительного световода прямоугольных секциях выходных торцов соответственно первого и третьего дополнительных световодов.
ё-В
иг.З
9иг.
9
