(Л
4
ISD ел
о
4
05
Изобретение относится к автоматике и р|1ожет быть использовано в копировальных Станках, движением рабочего органа кото- ых управляет копировальная система.
Целью изобретения является- расширение функциональных возможностей за счет ав- томатического переключения направлений Обхода и слежения рабочего органа.
На фиг. 1 приведена принципиальная :-|лектрическая схема системы управления Копированием; на фиг. 2 - схема обхода при 10 копировании наружного контура; на фиг. 3 - (|хема обхода при копировании внутреннего йг.нтура.
Система управления копированием соПри копировании в автоматическом режиме система определяет направление отклонения контура путем сравнения между собой скорости движения вдоль контура и скорости отслеживания. Если вторая больше первой, то в зависимости от направления отклонения меняется направление обхода и слежения. Для сравнения скоростей движения на каждом из поляризованных реле 13 и 14 имеется по две одинаковых обмотки, которые подключены к электродвигателям 11 и 12 таким образом, что при движении датчика 10 по оси X напряжение с электродвигателя 11 вызывает переключение поляризованных реле 13 и 14 в правое положение,
;|1,ержит блок 1 автоматики, кнопки 2-9 уп- - а при.движ,ении по оси У напряжение с элект- равления, датчик 10, электродвигатели 11родвигателя 12 переключает реле 13 влево,
li 12, поляризованные реле 13 и 14 с тремя ; правляющими обмотками, блок 15 пита- , переключатель 16, реле 17-20, нормаль- разомкнутые контакты 21-28.
Систе.ма управления копированием ра- 20 реле 13 и 14 происходит в случае, когда на- (отает следующим образом.пряжение на одном из электродвигателей И
I В исходном состоянии плюс блока 15 пищания через переключатель 16 подключен к 111оследовательно соединенным третьим об- ffiOTKHM поляризованных реле 13 и 14, под- 25 | ижные контакты этих реле занимают ис- содное положение.
В ручном режиме путем воздействия 1|снопками 2-9 управления через блок 1 автоматики на электродвигатели 11 и 12 датчик 10 подводится в исходную точку А на 30 поляризованные реле 13 и 14 находятся в наружном контуре детали (фиг. 2) или наисходном состоянии, то срабатывает реле 20
пнутреннем контуре (фиг. 3), причем перемещение по оси X производится электродвига- елем 11, а по оси У - электродвигателем 12. Управление перемещением датчика 10 в ручом режиме производится следующим обра- 35 .. Нажатие кнопки 2 управления вызы- ает дв fжeниe по оси X с заданной на бло- ;е 1 автоматики скоростью, а при нажатии | нопки 4 движение происходит с той же ско- |)остью, но в обратную сторону. Соответ- дд твенно кнопки 3 и 5 управления определяют Направление перемещения по оси У, кроме jroro, нажатие кнопки 6 вызывает ускоренное движение датчика 10 по оси X до кон - Такта с деталью и отслеживание им с помощью блока 1 автоматики и электродвигате- переключает поляризованное реле 14 влево: ля 11 контура детали в направлении этойреле 17 отключается и включаемся реле 18-
а реле 14 вправо, и соответственно при обратном движении переключение производится в противоположную сторону. В процессе копирования переключение поляризованных
и 12 больше, чем на другом, и в зависимости от состояния контактов этих реле срабатывает одно из четырех реле 17-20, два нормально разомкнутых контакта которых определяют направление движения обхода и слежения. Для работы в автоматическом режиме необходимо переключателем 16 подключить блок 15 питания к подвижному контакту поляризованного реле 13, а так как
и, воздействуя своими контактами 27 и 28 на блок 1 автоматики, вызывает движение датчика 10 но оси X с заданной скоростью, а в направлении оси У идет отслеживание контура.
Рассмотрим обход наружного контура (фиг. 2). При движении датчика 10 от точки А к точке-В напряжение на электродвигателе 12 увеличивается и после точки В превысит напряжение на электродвигателе 11 и переключит поляризованное реле 13 влево: реле 20 отключается и включается реле 17, что вызывает движение по оси У и слежение по оси X; после точки С отрицательное напряжение с электродвигателя 11
оси. При нажатии кнопки 8 происходит та- koe же движение и отслеживание контура, только в обратную сторону, соответственно кнопки 7 и 9 определяют направление отслеживания контура по оси У. Направление движения датчика 10, определяемое направлением вращения электродвигателей 11 и 12, зависит от полярности подаваемого на Них с блока 1 автоматики напряжения, причем скорость перемещения пропорциональна этому напряжению. В исходном состоянии система не влияет на основную работу установки.
начинается движение по оси X и слежение по оси У; после точки D поляризованное реле 13 переключается вправо, включаемся
СП реле 19 - начинается движение по оси У и слежение по оси X; после точки Е поляризованное реле 14 переключается вправо, включая снова реле 20, и заканчивается обход контура. Для отключения автоматического режима переключатель 16 устанавлива55 ется в исходное положение.
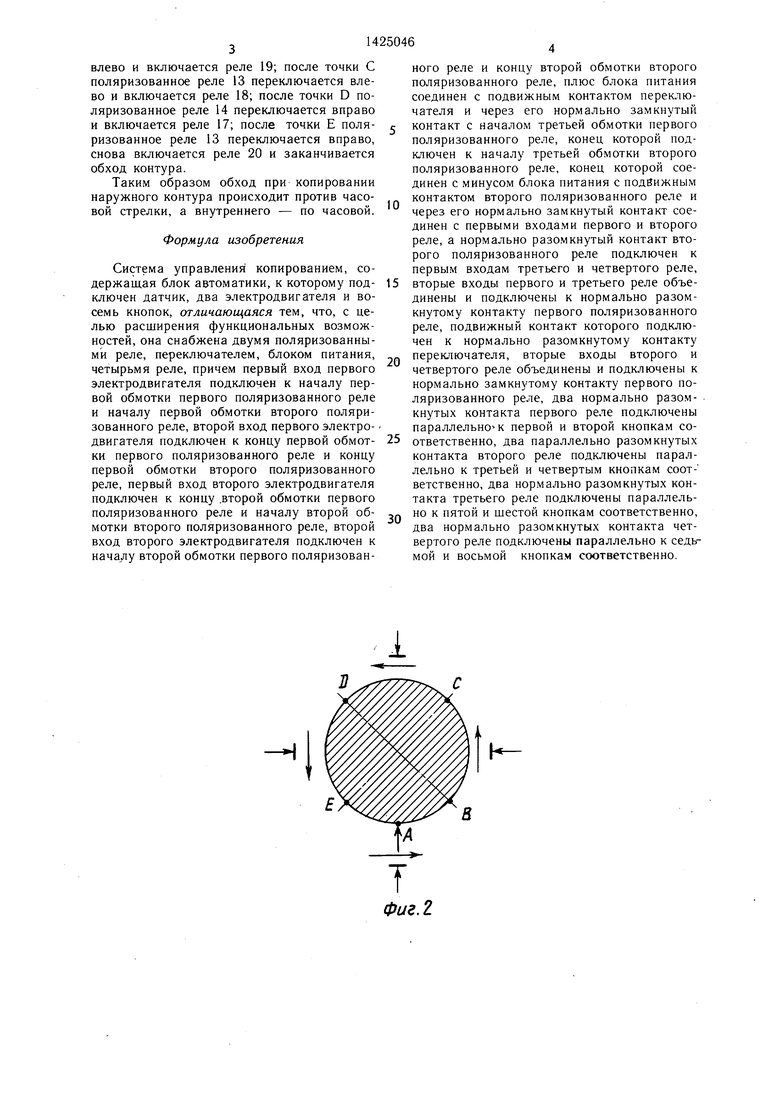
При обходе внутреннего контура (фиг. 3) срабатывают следующие реле: после точки В поляризованное реле 14 переключается
а при.движ,ении по оси У напряжение с элект- родвигателя 12 переключает реле 13 влево,
реле 13 и 14 происходит в случае, когда на- пряжение на одном из электродвигателей И
а реле 14 вправо, и соответственно при обратном движении переключение производится в противоположную сторону. В процессе копирования переключение поляризованных
реле 13 и 14 происходит в случае, когда на- пряжение на одном из электродвигателей И
поляризованные реле 13 и 14 находятся в исходном состоянии, то срабатывает реле 20
и 12 больше, чем на другом, и в зависимости от состояния контактов этих реле срабатывает одно из четырех реле 17-20, два нормально разомкнутых контакта которых определяют направление движения обхода и слежения. Для работы в автоматическом режиме необходимо переключателем 16 подключить блок 15 питания к подвижному контакту поляризованного реле 13, а так как
поляризованные реле 13 и 14 находятся в исходном состоянии, то срабатывает реле 20
переключает поляризованное реле 14 влево: реле 17 отключается и включаемся реле 18-
и, воздействуя своими контактами 27 и 28 на блок 1 автоматики, вызывает движение датчика 10 но оси X с заданной скоростью, а в направлении оси У идет отслеживание контура.
Рассмотрим обход наружного контура (фиг. 2). При движении датчика 10 от точки А к точке-В напряжение на электродвигателе 12 увеличивается и после точки В превысит напряжение на электродвигателе 11 и переключит поляризованное реле 13 влево: реле 20 отключается и включается реле 17, что вызывает движение по оси У и слежение по оси X; после точки С отрицательное напряжение с электродвигателя 11
начинается движение по оси X и слежение по оси У; после точки D поляризованное реле 13 переключается вправо, включаемся
реле 19 - начинается движение по оси У и слежение по оси X; после точки Е поляризованное реле 14 переключается вправо, включая снова реле 20, и заканчивается обход контура. Для отключения автоматического режима переключатель 16 устанавливается в исходное положение.
При обходе внутреннего контура (фиг. 3) срабатывают следующие реле: после точки В поляризованное реле 14 переключается
влево и включается реле 19; после точки С поляризованное реле 13 переключается влево и включается реле 18; после точки D поляризованное реле 14 переключается вправо и включается реле 17; после точки Е поляризованное реле 13 переключается вправо, снова включается реле 20 и заканчивается обход контура.
Таким образом обход при копировании наружного контура происходит против часовой стрелки, а внутреннего - по часовой.
Формула изобретения Система управления копированием, со10
ного реле и концу второй обмотки второго поляризованного реле, плюс блока питания соединен с подвижным контактом переключателя и через его нормально замкнутый контакт с началом третьей обмотки первого поляризованного реле, конец которой подключен к началу третьей обмотки второго поляризованного реле, конец которой соединен с минусом блока питания с подвижным контактом второго поляризованного реле и через его нормально замкнутый контакт соединен с первыми входа.ми первого и второго реле, а нормально разомкнутый контакт второго поляризованного реле подключен к первым входам третьего и четвертого реле.
20
держащая блок автоматики, к которому под- 15 вторые входы первого и третьего реле объе- ключен датчик, два электродвигателя и восемь кнопок, отличающаяся тем, что, с целью расширения функциональных возможностей, она снабжена двумя поляризованными реле, переключателем, блоком питания, четырьмя реле, причем первый вход первого электродвигателя подключен к началу первой обмотки первого поляризованного реле и началу первой обмотки второго поляризованного реле, второй вход первого электро- двигателя подключен к концу первой обмотки первого поляризованного реле и концу первой обмотки второго поляризованного реле, первый вход второго электродвигателя подключен к концу .второй обмотки первого поляризованного реле и началу второй обмотки второго поляризованного реле, второй вход второго электродвигателя подключен к началу второй обмотки первого поляризован25
30
динены и подключены к нормально разомкнутому контакту первого поляризованного реле, подвижный контакт которого подключен к нормально разомкнутому контакту переключателя, вторые входы второго и четвертого реле объединены и подключены к нормально замкнутому контакту первого поляризованного реле, два нормально разомкнутых контакта первого реле подключены параллельно-к первой и второй кнопкам соответственно, два параллельно разомкнутых контакта второго реле подключены параллельно к третьей и четвертым кнопкам соот- ветственно, два нормально разомкнутых контакта третьего реле подключены параллельно к пятой и шестой кнопкам соответственно, два нормально разомкнутых контакта четвертого реле подключены параллельно к седьмой и восьмой кнопкам соответственно.
ного реле и концу второй обмотки второго поляризованного реле, плюс блока питания соединен с подвижным контактом переключателя и через его нормально замкнутый контакт с началом третьей обмотки первого поляризованного реле, конец которой подключен к началу третьей обмотки второго поляризованного реле, конец которой соединен с минусом блока питания с подвижным контактом второго поляризованного реле и через его нормально замкнутый контакт соединен с первыми входа.ми первого и второго реле, а нормально разомкнутый контакт второго поляризованного реле подключен к первым входам третьего и четвертого реле.
вторые входы первого и третьего реле объе-
вторые входы первого и третьего реле объе-
динены и подключены к нормально разомкнутому контакту первого поляризованного реле, подвижный контакт которого подключен к нормально разомкнутому контакту переключателя, вторые входы второго и четвертого реле объединены и подключены к нормально замкнутому контакту первого поляризованного реле, два нормально разомкнутых контакта первого реле подключены параллельно-к первой и второй кнопкам соответственно, два параллельно разомкнутых контакта второго реле подключены параллельно к третьей и четвертым кнопкам соот- ветственно, два нормально разомкнутых контакта третьего реле подключены параллельно к пятой и шестой кнопкам соответственно, два нормально разомкнутых контакта четвертого реле подключены параллельно к седьмой и восьмой кнопкам соответственно.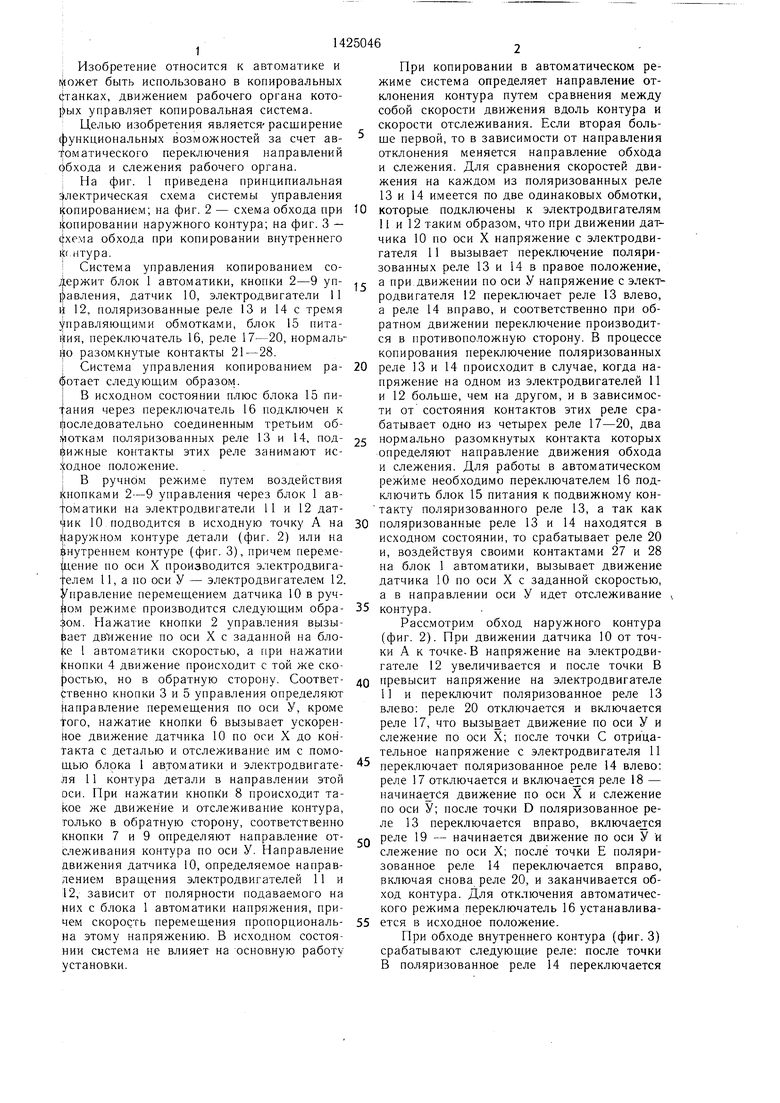
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для намотки электрических катушек | 1979 |
|
SU871238A1 |
| Устройство управления стрелочным переводом | 1989 |
|
SU1684146A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТРЕЛОЧНЫМ ЭЛЕКТРОПРИВОДОМ | 1995 |
|
RU2074830C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО МНОГОТОЧЕЧНОГО ДИСТАНЦИОННОГО КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ | 1955 |
|
SU107376A1 |
| Кнопочный переключатель | 1987 |
|
SU1422253A1 |
| Способ оценки технического состояния секций радиатора охлаждающего устройства транспортного средства и устройство для его осуществления | 1986 |
|
SU1379674A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ КОРРЕЛЯТОР | 1968 |
|
SU209083A1 |
| Устройство для управления стрелочным приводом переменного тока | 1987 |
|
SU1458268A1 |
| Электромеханическая следящая система для копировальных станков | 1957 |
|
SU124277A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ СТРЕЛОЧНОГО ПРИВОДА | 1995 |
|
RU2074831C1 |
Изобретение относится к автоматике и может быть использовано в полировальных станка.х, движением рабочего органа которых управляет копировальная система. Целью изобретения является расширение функциональных возможностей за счет автоматизации переключения направлений обхода и слежение рабочего органа установки при обработке деталей сложной конфигурации. Для .этого система отслеживает направление и скорость вращения электродвигателей 11, 12 с помощью поляризованных реле 13, 14, которые осуществляют управление блоком автоматики 1 через реле 17-20 и их нормально разомкнутые контакты 21-28. 3 ил.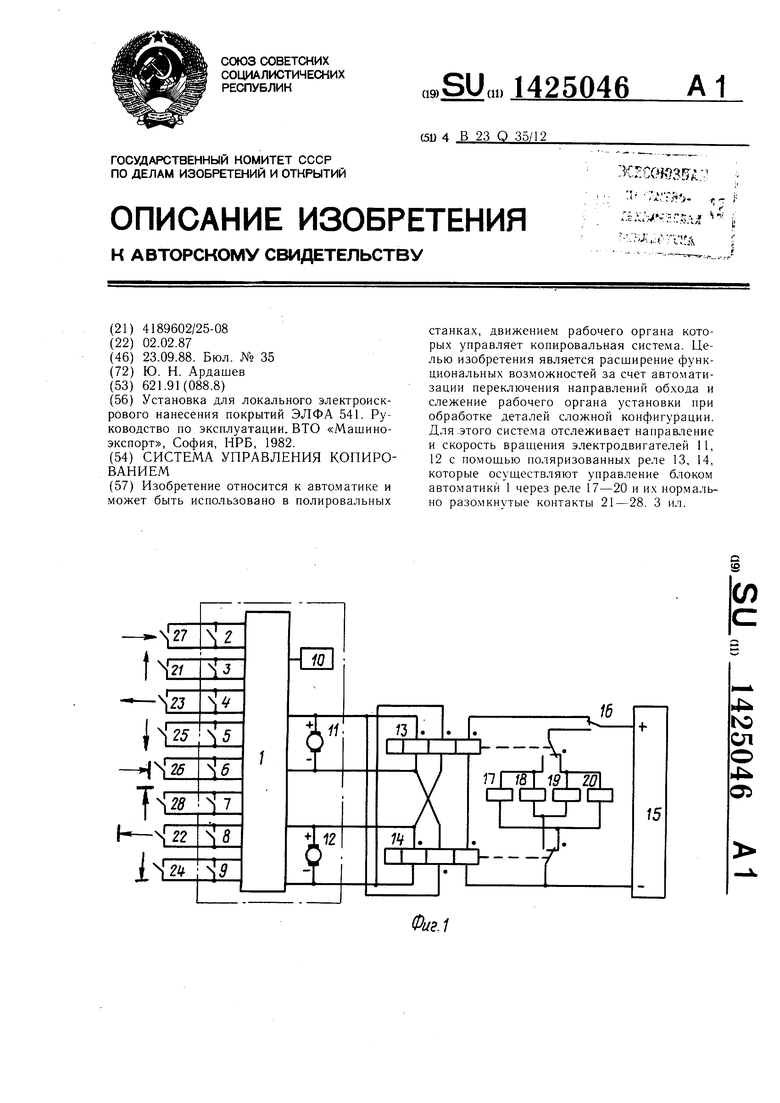
ki
Фие.З
| Способ обработки легко рассыпающихся и плохо высыхающих осочно-тростниковых торфов при помощи разбавленных щелочей | 1922 |
|
SU541A1 |
| Руководство по эксплуатации | |||
| ВТО «Машино- экспорт, София, НРБ, 1982. | |||
