-а
X
/
Изобретение относится к горной промыгалекности, а именно к средствам управления движением очистных агрегатов в плоскости пласта.Цель изобретения - повышение точности ведения агрегата в профиле пласта путем автоматизации управления положением оси секций базь,
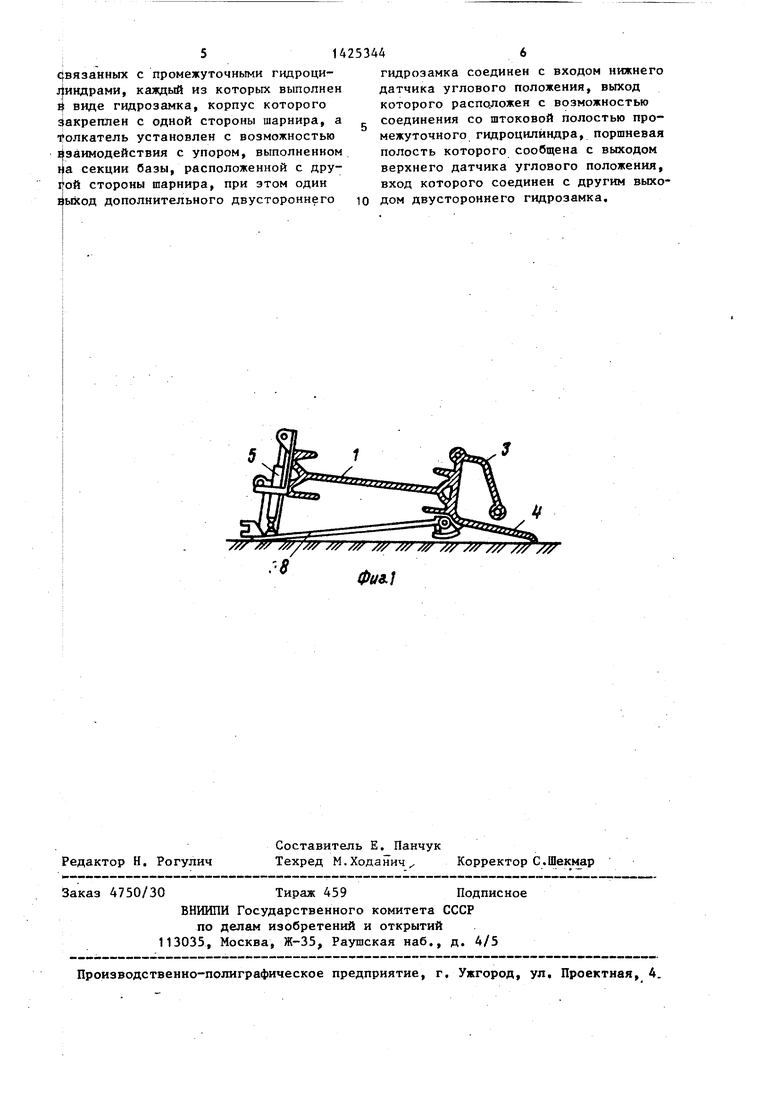
На фиг. 1 схематично показано .уст- ройство управления базой очистного агрегата в профиле пласта в положении движения агрегата вниз от исходного положения; на фиг, 2 - принципиальная гидравлическая схема устрой- ства.
Устройство включает секции базы 1, соединенные шарнирами 2. Секции базы
Iсоединены с направляющей 3 для движения струга и с угольником 4. С завальной стороны секции базы 1 шар- нирно соединены со штоками основных
5 и промежуточных 6 и 7 ri-одроцилинд- ров управления. В свою очередь гидроцилиндры 5-7 шарнирно соединены с подбазовой балкой 8. Полости основных гидроцилиндров 5 сообщены с выходами гидрозамков 9 двустороннего действия, входы которых через гидролинии 10 и
I1сообщены с выходами гидрораспреде- лителей 12 управления, входы которых соединены с напорной 13 и сливной 14 гидролиниями. Гидролинии 10 и 11 через гидролинии 15 и 16 подведены к . входам распределительного гидроблока 17 и дополнительного распределительного гидроблока 18 (гидрозамков двустороннего действия)5 выходы которых сообщены с гидролиниями 19 и 20 соединения. Гидролинии 19 через входы дополнительных гидрозамков 21 двустороннего действия, их выходы, гидролинии 22 сообщены с входом датчика 23 углового положения секции базы, выход которого через гидролинию 24 подсое- динен к поршневой полости промежуточного гидрощшиндра 6, а к гидролинии
20 через вход гидрозамка 21, его выход, гидролинию 25, выход датчика 26 углового положения секций базы, его вход и гидролинию 27 подсоединена штоковая полость этого гидроцилиндра. На толкатель (шток) датчика 23, расположенного вьше шарнира 2 секции базы 1, воздействует упор (рычаг) 28, а на толкатель (шток) датчика 26, расположенного ниже шарнира 2, - упор (рычаг) 29. Поршневая и штоковая полости гидроцилиндра 7 соединены с
гидролиниями 19 и 20 через гидрозамо
30двустороннего действия гидролинии
31и 32.
Управление производится каждым Гидрораспределителем 12 вручную или автоматически. В нейтральном положении последнего давление жидкости в гидролиниях 10 и 11 отсутствует и гидрозамки 9, 21 и 30 фиксируют положение основных 5 и промежуточных 6 и 7 гидроцилиндров. При включении, например, левого гидрораспределителя 12 в крайнее правое положение жидкость под давлением из напорной гидролинии 13 через гидрозамок 9 поступает в поршневую полость основного гидроцилиндра 5. Поршень этого гидроцилиндра начинает двигаться вверх, приподнимая секцию базы 1 относительно подбазовой балки 8, так, что угольник 4 прижимается к почве. Так как правый основной гидроцклиндр 5 выключен, то соответствующая секция базы 1 не перемещается. Через гидролинии 15 и 16 и гидрозамок 17 гидролинии 19 и 20 также подсоединяются соответственно к напорной 13 и сливной 14 гидролиниям. Через вход гид- розамок 30 и гидролинию 31 жидкость под давлением поступает в поршневую полость гидроцилиндра 7 управления, из штоковой полости которого жидкост через гидролинию 32, гидрозамок-30, гидролинию 20, гидрозамок 17, гидролинии 16 и 10 поступает в сливную гидролинию 14. При этом поршень гидроцилиндра 7 двигается вверх. Так ка положение шарнира 2, связанного с секцией базы 1 правого гидроцилиндра 5. зафиксировано, то секция базы 1, связанная с гидроцилиндром 7, поворачивается вокруг этого шарнира. Одно-- временно из гидролинии 19 рабочая жидкость под давлением через гидрозамок 21, гидролинию 22, датчик 23 углового положения промежуточных секций базы, гидролинию 24 поступает в поршневую полость гидроцилиндра 6,Из штоковой полости гидроцилиндра 6 жидкость по гидролинии 27 через датчик 26 углового положения секций базы, гидролинию 25, гидрозамок 21 поступает на слив через гидролинию 20.Поршень гидроцилиндра 6 также двигается вверх, при этом секция базы 1, связанная с ним, поворачивается относительно шарнира 2, связанного с левой основной секцией базы. Датчик 2 настроен так, что при совпадении продольных осей секций базы 1, связанных с гидроцилиндрами 6 и-7, рычаг 28, связанный с одной из секций, воздействует через его шток на клапан, обеспечивая поступление жидкост из гидролинии 22 в гидролинию 24, Аналогично настроен и датчик 26, одн ко при данном направлении движения жидкости его клапан не препятствует этому движению при любом положении штока.
Если скорости движения поршней гидроцилиндров 6 и 7 окажутся ниже требуемых, расстояние между датчиком 23 и рычагом 28 уменьшается, что приводит к дополнительному открытию клапана датчика 23, увеличению расхода жидкости через него и возрастанию скорости движения гидроцилиндра 6, За счет шарнирной связи промежуточных секций базы 1 увеличивается и скорость поршня гидроцилиндра 7. В результате рассогласование осей промежуточных секций базы уменьшается. Однако при чрезмерном увеличении скоростей движения поршней гидроцилиндров 6 и 7 расстояние между рычагом 28 и датчиком 23 увеличивается, что приводит к закрытию клапана последнего. В результате поршень гидроцилиндра 6 остановится, что приводит и к остановке поршня гидроцилиндра 7.Поскольку поршень гидроцилиндра 5 продолжает движение, это приводит к уменьшению угла рассогласования продольных осей промежуточных секций базы 1 и автоматическому включению гидроцилиндров 6 и 7ч
При включении левого гидрораспределителя 12 в крайнее левое положени поршень гидроцилиндра 5 двигается вниз. При этом через гидрозамок 17 гидролиния 20 окажется связанной с напорной гидролини й 13, а гидролиния 19 - с сливной гидролинией 14, Через гидрозамок 21, гидролинию 25, датчик 26 и гидролинию 27 жидкость под давлением поступает в штоковую полость гидроцилиндра 6, из поршневой полости которого жидкость через гидролинию 24, датчик 23, гидролинию 22, гидрозамок 21 поступает в гидролинию 19 и далее на слив. Так как рычаг 29 воздействует на клапан датчика 26 и он приоткрыт, то поршень гидроцилиндра двигается вниз. Одновременно штоковая полость гидроцилиндра 7 соединяется с нагнетанием, а поршневая - со сливом и его поршень также движется вниз. В случае рассогласования осей промежуточных секций базы датчик 26 или увеличивает или уменьшает скорость движения поршня гидроцилиндра 6 аналогично предьзду- щему.
Q Устройство работает аналогичным
образом, если левый гидрораспредели- тель оставить выключенным, а правый- включить в соответствующее положение, В этом случае гидролинии 19 и
5 20 соединяются с нагнетательной 13 и сливной 14 гидролиниями через гидрозамок 18,
Если гидрораспределители 12 установить одновременно в крайнее правое
Q или левое положение, устройство обеспечит движение основных и промежуточных гидроцилиндров вверх или вниз с автоматическим контролем совпадения продольных осей промежуточных секций
5 базы.
Формула изобретения
Устройство управления базой очи- 0 стного агрегата в профиле пласта,
включаюшее управляющие группами сек- ций базы гидрораспределители управления, входы катвдого из которых соединены с гидролиниями напора и слива.
выходы через гидролинин и двусторонний гидрозамок соединены с рабочими Полостями основного, а через распре,- делительный гидроблок и дополнительные двусторонние гидрозамки - с рабочими плоскостями двух промежуточных гидроцилиндров, расположенных между основными и связанных с шарнир- но соединенными между собой секциями базы агрегата, отличающееся
тем, что, с целью повьш1ения точности ведения агрегата путем автоматизации управления положением оси секций базы, оно снабжено дополнительным распределительным гидроблоком, выходы которого сообщены, посредством, гидролиний связи с выходами распределительного гидроблока и входами дополнительных двусторонних гидрозамков смежной группы секций базы, а
входы подсоединены к выходам гидро- распределителя управления, и спаренными датчиками углового положения, ; расположенными один выше, другой ниже шарнира соединения секций базы.
(вязанных с промежуточными гидроци- :|индрами, каждый из которых выполнен 4 виде гидрозамка, корпус которого Закреплен с одной стороны шарнира, а ролкатель установлен с возможностью взаимодействия с упором, выполненном tia секции базы, расположенной с другой стороны шарнира, при этом один Еыход дополнительного двустороннего
гидрозамка соединен с входом нижнего датчика углового положения, выход которого расположен с возможностью соединения со штоковой полостью промежуточного гидроцилйндра, поршневая полость которого сообщена с выходом верхнего датчика углового положения, вход которого соединен с другим выходом двустороннего гидрозамка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления базой очистного агрегата в профиле пласта | 1986 |
|
SU1404647A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД, ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2010 |
|
RU2449942C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ЛЮКОВОГО ЗАКРЫТИЯ | 2008 |
|
RU2364542C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО КАНТОВАТЕЛЯ С ПОВОРОТНОЙ ПОДЪЕМНОЙ ПЛАТФОРМОЙ | 2008 |
|
RU2356829C1 |
| ГИДРОПРИВОД ПЕРЕКРЫТИЯ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2000 |
|
RU2165529C1 |
| Гидросистема секции механизированной крепи | 1983 |
|
SU1145148A1 |
| Гидросистема управления механизированной крепью | 1980 |
|
SU949198A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2005 |
|
RU2281244C1 |
| Система непрерывной передвижки базы агрегата | 1991 |
|
SU1809101A1 |
| ГИДРОФИЦИРОВАННАЯ КРЕПЬ С ДРОССЕЛИРУЮЩИМ РАСПРЕДЕЛИТЕЛЕМ И РЕКУПЕРАЦИЕЙ ЭНЕРГИИ | 2012 |
|
RU2503816C1 |
Изобретение относится к горной промьшшенности, а именно к средствам управления движением очистных агрегатов в плоскости пласта. Цель - повышение точности ведения агрегата в профиле пласта путем автоматизации управления положением оси секций базы. Секции базы 1 шарнирно соединены со штоками основных и промежуточных гидроцилиндров (ГЦ) 5,6,7 управления, Полости основных ГЦ 5 сообщены с выходами гидрозамков 9 двустороннего действия, входы гидрозамков 9 через гидролинии 10 и 11 - с выходами гидрораспределителей (ГР) 12, входы ГР 12 соединены с напорной и сливной гидролиниями 13, 14. Г одpoлинии 10 и 11 через гидролинии 15 и 16 подсоединены к входам распределительного гидроблока 17 и дополнительного гидроблока 18, выходы которых сообщены с гидролиниями 19 и 20. Через входы дополнительных гидрозамков 21 гидролинии 22 сообщены с дходом датчика 23 углового перемещения, расположенного выше секций базы. Другой датчик 26 расположен ниже секций базы и связан с ГЦ 7. Поршневая и штоковая полости ГЦ 7 соединены с гидролиниями 19 и 20 через гидрозамок 30.2 ил.
0a3.J
| Устройство для передвижения базы очистного агрегата | 1978 |
|
SU777216A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство управления движением выемочного агрегата по гипсометрии угольного пласта | 1979 |
|
SU878932A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
