Изобретение относится к угольному машиностроению и может быть использовано в системах автоматического управления перемещения баз угледобывающих агрегатов.
Известно устройство управления передвижкой базы агрегата, содержащее рабочие гидроцилиндры, дроссели, регуляторы потока, тяги, большие и малые рычаги, жесткие элементы. Рычаги закреплены на секциях и связаны с тягами, которые связаны с регуляторами потока.
Недостатком устройства является низкая точность и надежность его работы, обусловленная невозможностью осуществления непрерывной передвижки базы агрегата и возможностью формирования в устройстве ложных сигналов ввиду наличия сложных
механических систем. Так, в процессе выемки полезного ископаемого агрегатом происходит повреждение механических элементов кинематической системы, их деформирование и формирование ложных сиг- калов о положении базы. Кроме того, при подтягивании группы секций крепи, гидроцилиндры которой связаны с угловыми регуляторами потока, происходит отключение всех угловых регуляторов и остановка базы агрегата на время подтягивания группы секций. Это приводит к снижению производительности и искривлению базы при отсутствии непрерывного контроля ее положения. В результате изложенного существующие устройства не позволяют осуществить непрерывную передвижку базы.
00
8
Цель изобретения - повышение качества процесса управления точности и надежности его работы за счет непрерывной передвижки базы агрегата и постоянным контролем ее состояния.
Поставленная цель достигается тем, что непрерывное перемещение базы осуществяется гидроцилиндром перемещения, в бесштоковую полость которого включен регулятор потока с механической обратной связью.
При этом перемещение базы осуществляется одной из групп гидроцилиндров секций крепи. При очередном подтягивании данной группы секций крепи с помощью дистанционной гидролинии управления осуществляется автоматическое переключение регуляторов потока к гидроцилиндрам второй группы секций с помощью клапанов ИЛИ и трехлинейных двухпозици- онных распределителей с дистанционным управлением и возвратной пружиной.
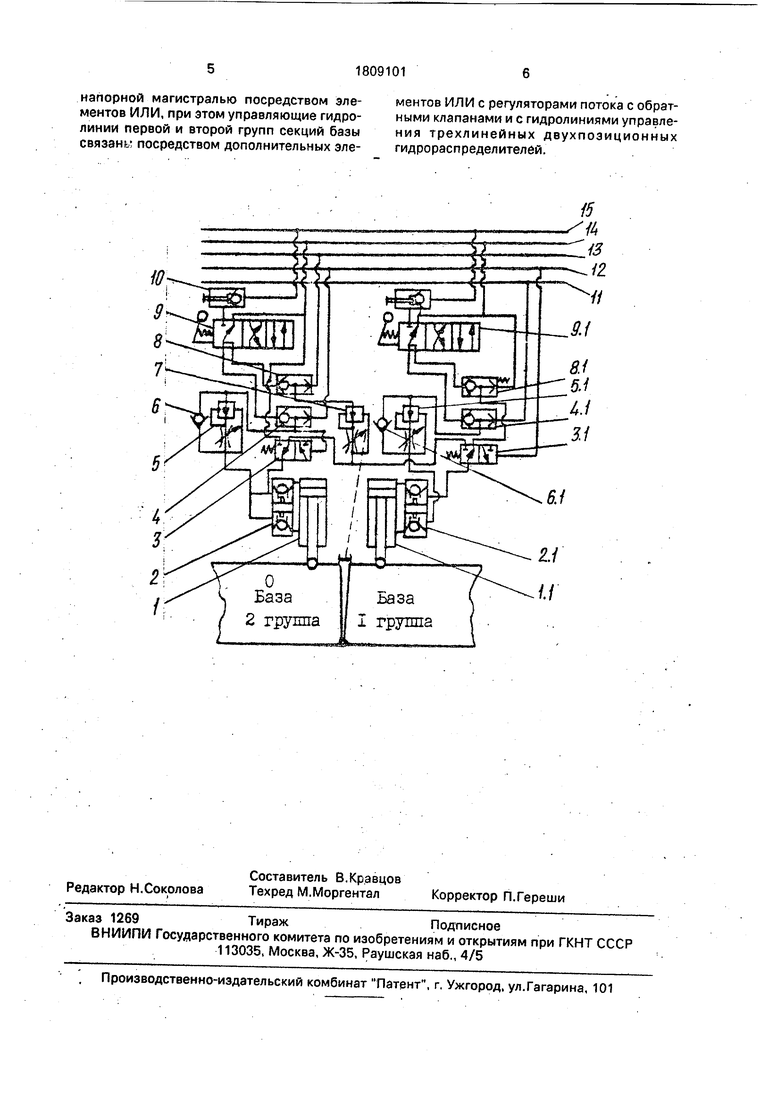
На чертеже показана гидравлическая схема системы непрерывной передвижки базы, Система содержит рабочие гидроцилиндры 1, гидрозамок двустороннего действия 2, трехлинейный двухпозиционный распределитель дистанционного управления с возвратной пружиной 3, клапан ИЛИ 4, настроенный регулятор потока 5 с обратным клапаном 6 в штоковой линии гидроцилиндра 7, элемент ИЛИ 8 в бесштоковой линии гидроцйлиндра передвижки 1, четы- рехпозиционный четырехлинейный распре- делитель 9 с отсекателем 10 и гидролинии дистанционного управления первой группы секций 11, передвижки второй группы секций 12, линии передвижки базы 13, слива 14, напорной-линии 15 местного управле- ния.
Устройство работает следующим обра- зом.
При работе агрегата рабочая жидкость подается по гидролинии 13 через элемент ИЛИ 8, регулятор потока с механической обратной связью 7, распределитель с дистанционным управлением 3 и гидрозамок 2 в бесштоковую полость гидроцилиндра 1. Осуществляется передвижка секций базы агрегата на забой. При этом из штоковой полости рабочая жидкость через гидрозамок 2, обратный клапан 6, элемент ИЛИ 4 и по гидролинии 12 поступает на слив. Подтягивание первой группы секций крепи осуществляется дистанционно подачей рабочей жидкости по гидролинии 11 через клапан ИЛИ АЛ, регулятор потока 5.1, гидрозамок 2.1 в штоковую полость гидроцилиндра 1.1. Вытесняемая из бесштоковой полости рабочая жидкость через гидрозамок 2.1, распределитель 3.1, элемент ИЛИ 8.1 поступает в линию слива 14.
После выдвижки штоков гидроцилиндров второй группы и подтягивания секций
крепи первой группы рабочая жидкость подается в линию 12 и через элемент ИЛИ 4, регулятор потока 5 и гидрозамок 2 поступит в штоковую полость гидроцилиндра 1, При этом жидкость из бесштоковой полости гид- роцилиндра через гидрозамок 2, распределитель 3, включенный дистанционно во второй позиции, поступает в линию слива 14. А рабочая жидкость из линии дистанционной выдвижки базы 13 через элемент
ИЛИ 8, регулятор потока 7 поступит через включенный также дистанционно распределитель 3,1 и гидрозамок в бесштоковую полость гидроцилиндра 1.1.
Таким образом осуществляется непрерывная передвижка базы агрегата с заданной, скоростью, что обеспечивается заданным расходом одного регулятора потока 7.
Ручное или местное управление осуществляется с помощью распределителя 9 С отсекателем ТО, через клапаны ИЛИ 7 и 8 независимо от состояния гидроаппаратуры дистанционного управления и соседней секции крепи по обычной гидравлической
схеме механизированной крепи. ..
Технические преимущества заявляемого объекта по сравнению с известными решениями заключаются в повышении точности и надежности его работы за счет
обеспечения непрерывной передвижки и постоянной скорости базы агрегата при кон- троле ее состояния.
Формула изобретения
Система непрерывной передвижки базы агрегата, включающая гидроцилйндры передвижки первой и второй групп секций базы, полости которых соединены гидрозамками с регуляторами потока с обратными клапанами и с напорной и сливной гидролиниями, регулятор потока с механической обратной связью, соединенный с секциями базы, отличающаяся тем, что, с целью повышения точности системы и
надежности ее работы за счет обеспечения непрерывной и постоянной скорости передвижки базы, она снабжена управляющими гидролиниями первой и второй групп секций базы, а регулятор потока с механической обратной связью соединен с поршневыми полостями гидроцилиндров первой и второй групп секций базы посредством трехлинейных двухпозиционных гид- рораспределителей, выполненных с
гидравлическими линиями управления и с
напорной магистралью посредством элементов ИЛИ, при этом управляющие гидролинии первой и второй групп секций базы связаны посредством дополнительных элементов ИЛИ с регуляторами потока с обратными клапанами и с гидролиниями управления трехлинейных двухпоэиционных гидрораспределителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления секциями крепи угледобывающего агрегата | 1986 |
|
SU1320444A1 |
| Система гидравлического управления секциями крепи угледобывающего агрегата | 1985 |
|
SU1332035A1 |
| Способ выемки угля конвейероструговым агрегатом с несколькими исполнительными органами | 1988 |
|
SU1606653A1 |
| Гидросистема секции механизированной крепи | 1985 |
|
SU1283414A1 |
| Пульт дистанционного управления угледобывающим агрегатом | 1988 |
|
SU1573202A1 |
| ГИДРОСИСТЕМА СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1999 |
|
RU2161254C1 |
| Гидросистема управления механизирован-НОй КРЕпью | 1978 |
|
SU802661A1 |
| Устройство для передвижки стругового механизированного комплекса | 1988 |
|
SU1528907A1 |
| Устройство управления базой выемочной машины | 1986 |
|
SU1442651A1 |
| Устройство обеспечения подпора | 1975 |
|
SU746121A1 |
Использование: в горной промышленности для систем автоматического управления перемещения баз угледобывающих агрегатов. Сущность изобретения: система непрерывной передвижки базы агрегата включает гидроцилиндры передвижки первой и второй групп секций базы, которые через гидрозамки соединены с регулятором потока с обратными клапанами и с гидролиниями напорной и сливной. Регулятор потока с механической обратной связью соединен с секциями базы и с поршневыми Тюлостями гидроцилиндров первой и второй групп секций базы посредством трехлинейных двухпоэицион- ных гидрораспределителей и с напорной магистралью посредством элементов ИЛИ. Управляющие гидролинии первой.и второй групп секций базы связаны посредством дополнительных элементов ИЛИ.с гидролиниями управления трехлинейных двухпо- зиционных гидрораспределителей и с регуляторами потока с обратными клапанами. 1 ил. С vo &
| Авторское свидетельство СССР № 227278, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для ударной очистки и одновременной транспортировки заготовок | 1971 |
|
SU472000A1 |
| кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
