Х9
Изобретение относится к весодози- рующей технике и может быть использовано для дозирования сыпучих вещест малыми дозами,например лекарственных препаратов.
Цель изобретения - повышение то ч- ности дозирования.
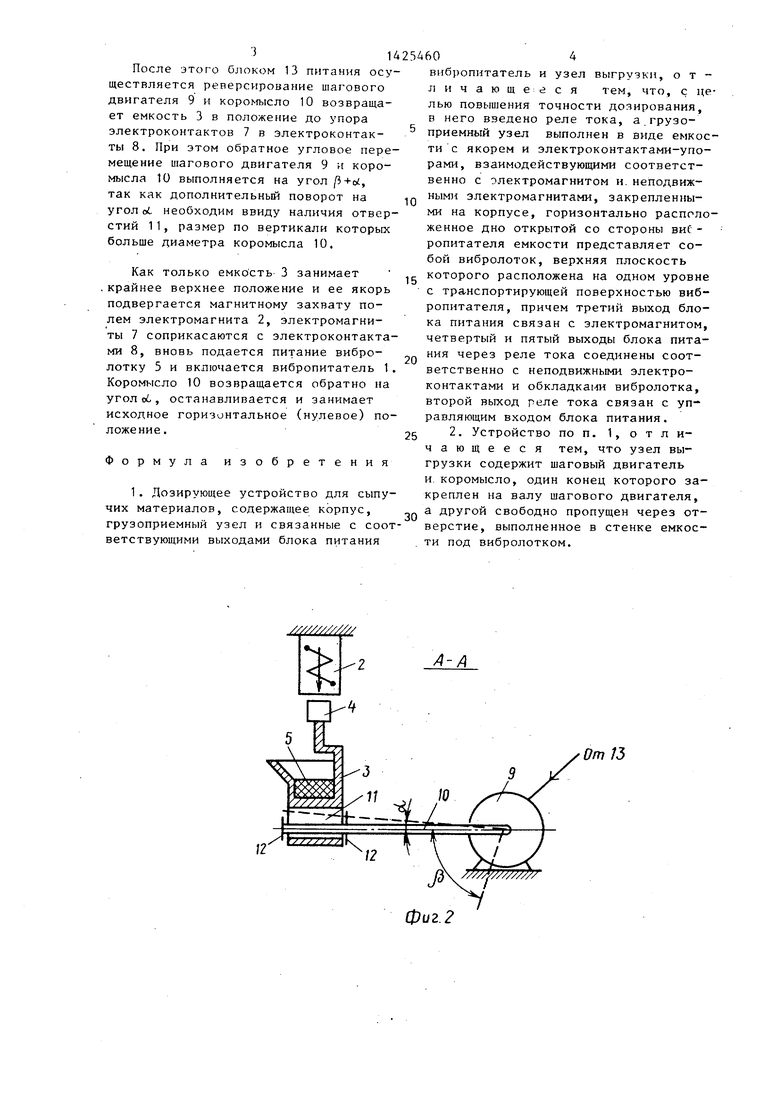
На фиг.1 изображен дозатор, общин вид; на фиг. 2 - разрез А-А на фиг.1
Дозатор содержит установленный на корпусе вибропитатель 1, грузоподъемный узел, состоящий из неподвижного электромагнита 2 и емкости 3, взаимодействующей с электромагнитом 2 посредством прикрепленного к ней якоря 4. Емкость 3 снабжена расположенным на дне вибролотком 5 дозируемого сыпучего материала 6, причем поверхность вибролотка 5 расположена на уровне плоскости транспортирования вибропитателя 1. Кроме того, к емкости 3 прикреплены не менее двух расположенных вертикально и перпендикулярно вибролотку 5 жестких электроконтактов-упоров 7, взаимодействующих с неподвижными злектроконтакта- ми 8, расположенными на корпусе дозатора.
Дозатор также содержит узел выгрузки емкости 3, включающий шаговь й двигатель 9 и закрепленное на его валу коромысло 10, причем емкость 3 свободно насажена на удаленный конец коромысла 10 через,отверстия 11 и размещена между ограничителями 12. Кроме этого, в дозатор входит блок 13 питания, первь1Й и второй выходы которого соединены соответственно с вибродвигателем 1 и шаговым двигателем 9, а третий - с электромагнитом 2. Подача электрического сигчшла высокой частоты к обкладкам вибролотка 5 осуществляется от блока 13 питания через электропроводные контакты 7 и 8, а также через реле 14 тока, последо вательно включенное в эту цепь. Второй выход реле 14 тока соединен с уп равляющим -входом блока 13 питания.
Устройство работает следующим образом.
В исходном состоянии электромагнит 2 получает питание калиброванной величины от блока 13 питания. Шаговый двигатель 9 включен, и коромысло 10 находится в горизонтальном положении Создаваемое электромагнитом 2 магнитное поле действует на якорь 4 емкости. 3, стараясь притянуть его к элект
.
ромагниту 2. Однако (фиг. 1) передвижение вверх якоря 4 ограничено электроконтактами 7 и 8. Емкость 3 с помощью магнитных сил электромагнита 2 занимает наивысшее рабочее положе}П1е, а ее дно, образуемое поверхностью вибролотка 5, лежит на одном уровне с транспортирующей плоскостью вибропитателя 1 .
15
20
. 55 30
45
После подачи электрического сигнала на электромагнит 2 от блока 13 питания по команде реле 14 при замыкании контактов 7 и 8 вибропитатель 1 начинает непрерывную подачу дозируемого материала 6 в сторону емкости 3. Так как расстояние между ними со°с- тавляет несколько больше двух амплитуд колебательного движения вибропитателя 1, что в абсолютных и реальных единицах составляет 25-50 мкм для обеспечения вибротранспортирования мелкого сыпучего вещества диаметром 25° О,1-0,5 мм, то это гарантирует надежный сход этого вещества с вибропитателя 1 на вибролоток 5 без потерь. Одновременно с началом подачи сыпучего материала 6 в емкость 3 подается питание от блока 13 к вибролотку 5, представляющему собой,например, пьезокерамику.
Дозируемый материал 6 перемещается в удаленную от вибропитателя 1 сторону емкости 3. Это перемещение препятствует ског-1лению дозируемого материала 6 в -передней части емкости 3. Как 1олько количество дозируемого материала 6 на поверхности вибропитателя 5 достигает требуемой величины и развиваемая пм сила веса вместе с весом всего подвешенного узла емкости 3 npeBi:iuaeT силу магнитного притяжения электромагнита 2, емкость 3 падает до упора стенок отверстия 11 в коромысло 10, электрический контакт между контактами-- 7 и 8 прерывается. Это вызьшает прекращение тока в п,епи реле 14 тока. Следовательно, по сигналу с второго выхода реле 14 тока в управляющий вход блока 13 питания происходит выключение вибропитателя 1 и включение питания, обеспечивающее вращение вала шагового двигателя 9. Шаговый двигатель 9 осуществляет поворот на угол jb коромысла 10 вниз, заставляя перемещаться и емкость 3, при этом последняя опорожняется от дозируемого материала 6.
35
40
50
После этого блоком 13 питания осуществляется реперсирование шагового двигателя 9 и коромысло 10 возвращает емкость 3 в положе {ие до упора электроконтактов 7 в электроконтакты 8. При этом обратное угловое перемещение шагового двигателя 9 и коромысла 10 выполняется на угол/3+oi, так как дополнительный поворот на угол oi. необходим ввиду наличия отверстий 11, размер по вертикали которых больше диаметра коромысла 10,
Как только емкость 3 занимает .крайнее верхнее положение и ее якорь подвергается магнитному захвату полем электромагнита 2, электромагниты 7 соприкасаются с электроконтактами 8, вновь подается питание вибролотку 5 и включается вибропитатель 1. Короммсло 10 возвращается обратно на угол о., останавливается и занимает исходное горизонтальное (нулевое) положение.
Формула изобретения
1. Дозирующее устройство для сыпучих материалов, содержащее корпус, грузоприемный узел и связанные с соответствующими выходами блока питания
54604
вибропитатель и узел выгрузки, отличающееся тем, что, с целью повышения точности дозирования, в него введено реле тока, а грузоприемный узел выполнен в виде емкости с якорем и электроконтактами-упорами, взаимодействующими соответственно с электромагнитом и. неподвижQ ными электромагнитами, закрепленными на корпусе, горизонтально расположенное дно открытой со стороны виС- ропитателя емкости представляет собой вибролоток, верхняя плоскость
g которого расположена на одном уровне с транспортирующей поверхностью вибропитателя, причем третий выход блока питания связан с электромагнитом, четвертый и пятый выходы блока питания через реле тока соединены соответственно с неподвижными электроконтактами и обкладками вибролотка, второй выход реле тока связан с управляющим входом блока питания.
2. Устройство по п. 1, отличающееся тем, что узел выгрузки содержит шаговый двигатель и коромысло, один конец которого закреплен на валу шагового двигателя, а другой свободно пропущен через отверстие, выполненное в стенке емкости под вибролотком.
0
5
0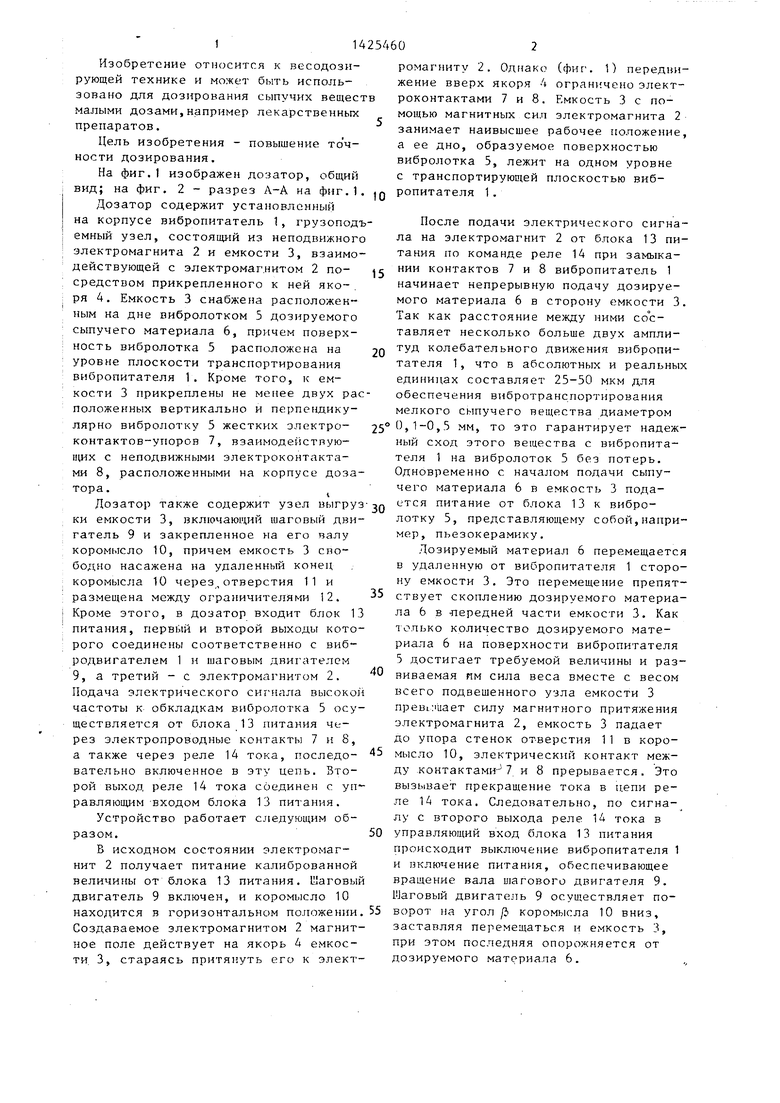
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ весового порционного дозирования и устройство для его осуществления | 1990 |
|
SU1755058A1 |
| СПОСОБ НЕПРЕРЫВНОГО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2007 |
|
RU2366904C2 |
| РОТОРНЫЙ КОМБИНАЦИОННЫЙ ДОЗАТОР | 2004 |
|
RU2311324C2 |
| ДОЗАТОР ВЕСОВОЙ | 2019 |
|
RU2721720C1 |
| Автоматический весовой дозатор | 1961 |
|
SU146987A1 |
| СПОСОБ ПЕРИОДИЧЕСКОГО ВЕСОВОГО ДОЗИРОВАНИЯ | 2019 |
|
RU2733737C1 |
| Способ дозирования сыпучих материалов и устройство для его осуществления | 1990 |
|
SU1742128A1 |
| ЭЛЕКТРОВИБРАЦИОННОЕ УСТРОЙСТВО | 1994 |
|
RU2116143C1 |
| Устройство для дозирования жидких и сыпучих материалов | 1983 |
|
SU1219925A1 |
| УСТРОЙСТВО ДЛЯ ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2001 |
|
RU2221223C2 |
Изобретение относится к весодо- эирующей технике и м.б. использовано для дозирования лекарственных препаратов. Цель изобретения - повышение точности дозирования. Грузоприемный узел устр-ва выполнен в виде емкости 3 с якорем 4 и электроконтактами-упорами 7, взаимодействующими с электромагнитом 2. Непрерывная подача дозируемого материала в емкость 3 осуществляется по команде реле 14 тока при замыкании электроконтактов-упоров 7 и неподвижных электроконтактов 8, закрепленных на корпусе. На дне емкости 3 расположен вибролоток 5, поверхность которого находится на уровне плоскости транспортирования вибропитателя 1. При наборе необходимой дозы материала емкость 3 падает до упора стенок отверстия 1 1 в коромысло 10. По сигналу реле 14 ша- говьм двигатель поворачивает коромысло 10, что пригодит к перемещению емкости 3 и ее опорожнению. 1 з.п. ф-лы, 2 ил. ( СО
/////////////
От 15
J3VT
У//7/////
фиг.г
| 0 |
|
SU249675A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авт орское свидетельство СССР , кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
