4 О
сд
4
Изобретение относится к измерительной технике и предназначено для использования в различных информационно-измерительных системах, где шумы с достаточной степенью точности могут быть аппроксимированы нормальным или близким к нормальному распределением.
Цель изобретения - повышение точности и надежности измерений путем снижения погрешности статистического оценивания за счет снятия ограничения на объ- Ю ем выборки при исследовании нестационарных случайных процессов.
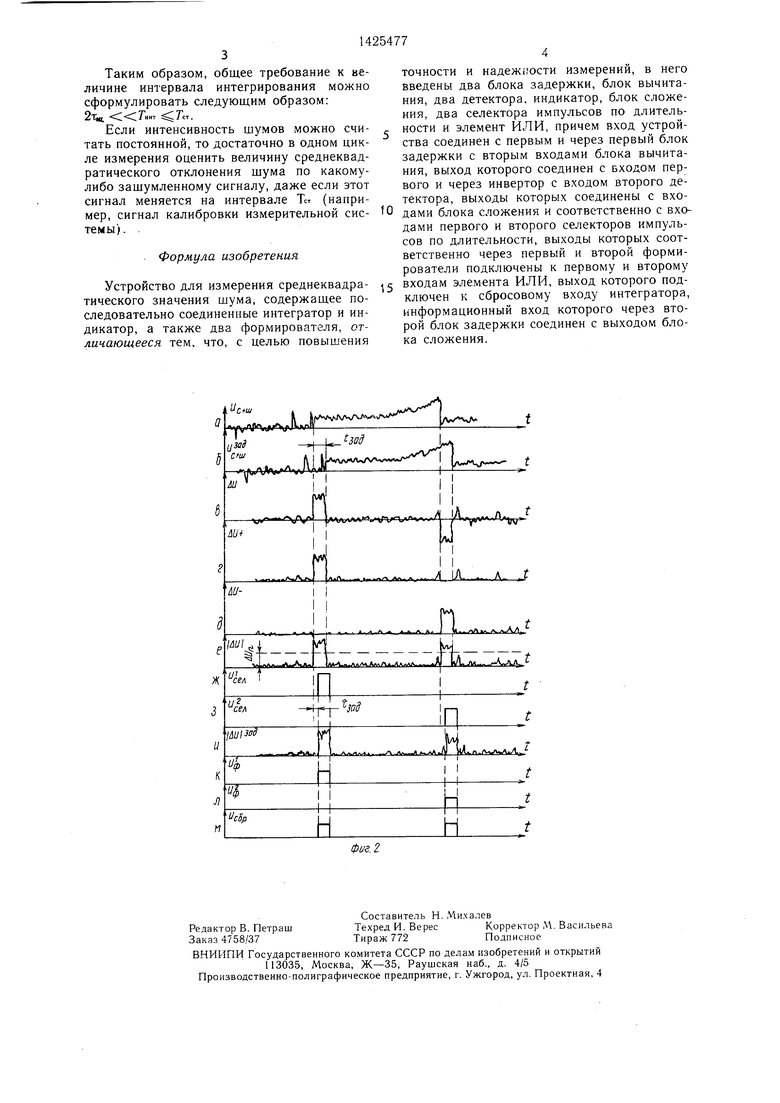
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - временные диаграммы, поясняющие работу устрой- ства.
Устройство содержит первый блок 1 задержки, блок 2 вычитания (например, дифференциальный усилитель), первый 3 и второй 4 детекторы, инвертор 5, блок 6 сложения, первый 7 и второй 8 селекторы импуль- 20 сов по длительности, первый 9 и второй 10 формирователи, второй блок 11 задержки, элемент ИЛИ 12, интегратор 13 и индика- :тор 14. Вход устройства соединен с первым входом блока 2 вычитания и через первый ;блок 1 задержки с вторым его входом. Вы- ход блока 2 вычитания соединен через пер- вый детектор 3 с одним из входов блока 6 |сложения и через первый селектор 7 и пер- |вый формирователь 9 с одним из входов эле- |мента ИЛИ 12, а через последовательно Q Ьоединенные инвертор 5 и второй детектор 4 - b другим его входом и через второй селек- гор 8 и второй формирователь 10 с другим входом элемента ИЛИ 12. Выход блока 6 :ложения через второй блок 11 задержки и нтeгpaтop 13 соединен с входом индикато- г за 14, а выход элемента ИЛИ 12 соединен :о сбросовым входом интегратора 13. I Устройство работает следующим образом.
В основу функционирования устройства положена связь между среднеквадратичес- им отклонением нормально распределенно- 40 го шума a(Uiu.) и таким параметром первых разностей, как среднее значение их модулей
a((y.)f/. ,
1 де Lizi, Ци - соответственно входной и задержанный входной щум.
Входным сигналом устройства (фиг. 2а) может быть либо шум с изменяющимся во вре.мени математическим ожиданием Miu.(t), либо некоторый сигнальный параметр Uc(t), 50 на который наложен центрированный или не- центрированный шум Uia.(t). В обоих случаях предполагается, что на входе устройства действует нецентрированный случайный процесс Uf,t-tu.(f), и в таком виде смесь сигнал +
щий интервал корреляции шума (фиг. 26) В результате вычитания сигналов в блоке 2 вычитания на его выходе формируется сигнал разности AU f/e-Hu. - . значений шума в двух сечениях процесса, разделенных временным интервалом 4в.З (фиг. 2в)
Сигнал разности между задержанным и незадержанным входными сигналами поступает с выхода блока 2 вычитания одновременно на вход первого детектора 3 и через инвертор 5 уже в инвертированном виде -Af/ на вход второго детектора 4. В результате детектирования на один из входов блока 6 сложения поступает сигнал, соответствующий положительным значениям разностей (фиг. 2г), на другой - сигнал, соответствующий отрицательным значениям разностей AL - (фиг. 2д). На выходе блока 6 сложения получают уже сигнал, соответствующий модулю разности /Аб / шума и задержанного шума (фиг. 2е). После задержки во втором блоке 11 задержки на вход интегратора 13 поступает сигнал модуля разностей (фиг. 2и), задержанный на некоторый интервал тзад.
Специфичность алгоритма, положенного в основу работы устройства, проявляется на входах блока 6 сложения. Здесь скачки сигнальной функции оказываются трансформированными в импульсы длительности, равной интервалу задержки /зад в первом блоке 1 задержки. Именно эти импульсы и выделяются двумя селекторами 7 и 8 импульсов по длительности. Селектор 7 выделяет положительные скачки (фиг. 2ж), а селектор 8 - отрицательные (фиг. 2з). В процессе селекции может быть некоторая задержка импульсов iw . Вне зависимости от амплитуды выделенных импульсов формирователи 9 и 10 обеспечивают формирование управляющих импульсов (фиг. 2 к, л), которые после логического сложения на элементе ИЛИ 12 поступают на сбросовый вход (фиг. 2 м) интегратора 13 и тем самым обеспечивают устранение ошибок измерений.
Интегратор 13 производит интегрирование с постоянной времени Тннт, на величину которой наложены следующие ограничения. С одной стороны, величина Тинт не должна превышать значения, в пределах которого интенсивность шумов (их среднеквадратичес- кое отклонение) можно считать постоянной (период стационарности Тст шумового процесса). Это требование обусловлено требованием постоянства измеряемого параметра на временном интервале измерения. Таким образом, первое ограничение на интервал интегрирования: Тивт: Тст.
С другой стороны, величина Тннг должна
шум поступает на первый вход блока 2 вы- 55 обеспечить набор заданной статистики, т. е.
читания. На второй (вычитающий) вход бло- быть.значительно больше интервала корреляции разностей траз на выходе блока 6 сложения. Величина траз в два раза превышает
ка 2 поступает этот же сигнал, но задержанный первым блоком 1 задержки на некоторый временной интервал ао/э , превышаювеличину интервала корреляции шумов и.
щий интервал корреляции шума (фиг. 26). В результате вычитания сигналов в блоке 2 вычитания на его выходе формируется сигнал разности AU f/e-Hu. - . значений шума в двух сечениях процесса, разделенных временным интервалом 4в.З (фиг. 2в).
Сигнал разности между задержанным и незадержанным входными сигналами поступает с выхода блока 2 вычитания одновременно на вход первого детектора 3 и через инвертор 5 уже в инвертированном виде -Af/ на вход второго детектора 4. В результате детектирования на один из входов блока 6 сложения поступает сигнал, соответствующий положительным значениям разностей (фиг. 2г), на другой - сигнал, соответствующий отрицательным значениям разностей AL - (фиг. 2д). На выходе блока 6 сложения получают уже сигнал, соответствующий модулю разности /Аб / шума и задержанного шума (фиг. 2е). После задержки во втором блоке 11 задержки на вход интегратора 13 поступает сигнал модуля разностей (фиг. 2и), задержанный на некоторый интервал тзад.
Специфичность алгоритма, положенного в основу работы устройства, проявляется на входах блока 6 сложения. Здесь скачки сигнальной функции оказываются трансформированными в импульсы длительности, равной интервалу задержки /зад в первом блоке 1 задержки. Именно эти импульсы и выделяются двумя селекторами 7 и 8 импульсов по длительности. Селектор 7 выделяет положительные скачки (фиг. 2ж), а селектор 8 - отрицательные (фиг. 2з). В процессе селекции может быть некоторая задержка импульсов iw . Вне зависимости от амплитуды выделенных импульсов формирователи 9 и 10 обеспечивают формирование управляющих импульсов (фиг. 2 к, л), которые после логического сложения на элементе ИЛИ 12 поступают на сбросовый вход (фиг. 2 м) интегратора 13 и тем самым обеспечивают устранение ошибок измерений.
Интегратор 13 производит интегрирование с постоянной времени Тннт, на величину которой наложены следующие ограничения. С одной стороны, величина Тинт не должна превышать значения, в пределах которого интенсивность шумов (их среднеквадратичес- кое отклонение) можно считать постоянной (период стационарности Тст шумового процесса). Это требование обусловлено требованием постоянства измеряемого параметра на временном интервале измерения. Таким образом, первое ограничение на интервал интегрирования: Тивт: Тст.
С другой стороны, величина Тннг должна
обеспечить набор заданной статистики, т. е.
величину интервала корреляции шумов и.
Таким образом, общее требование к величине интервала интегрирования можно сформулировать следующим образом:
21. «Гвнт Гст.
Если интенсивность шумов можно считать постоянной, то достаточно в одном цикле измерения оценить величину среднеквад- ратического отклонения щума по какому- либо защумленному сигналу, даже если этот сигнал меняется на интервале Тст (например, сигнал калибровки измерительной системы). .
Формула изобретения
Устройство для измерения среднеквадра- тического значения шума, содержащее последовательно соединенные интегратор и индикатор, а также два формирователя, ог- личаюшееся тем, что, с целью повышения
0
5
точности и надежности измерений, в него введены два блока задержки, блок вычитания, два детектора, индикатор, блок сложения, два селектора импульсов по длительности и элемент ИЛИ, причем вход устройства соединен с первым и через первый блок задержки с вторым входами блока вычитания, выход которого соединен с входом первого и через инвертор с входом второго детектора, выходы которых соединены с входами блока сложения и соответственно с входами первого и второго селекторов импульсов по длительности, выходы которых соответственно через первый и второй формирователи подключены к первому и второму входам элемента ИЛИ, выход которого подключен к сбросовому входу интегратора, информационный вход которого через второй блок задержки соединен с выходом блока сложения.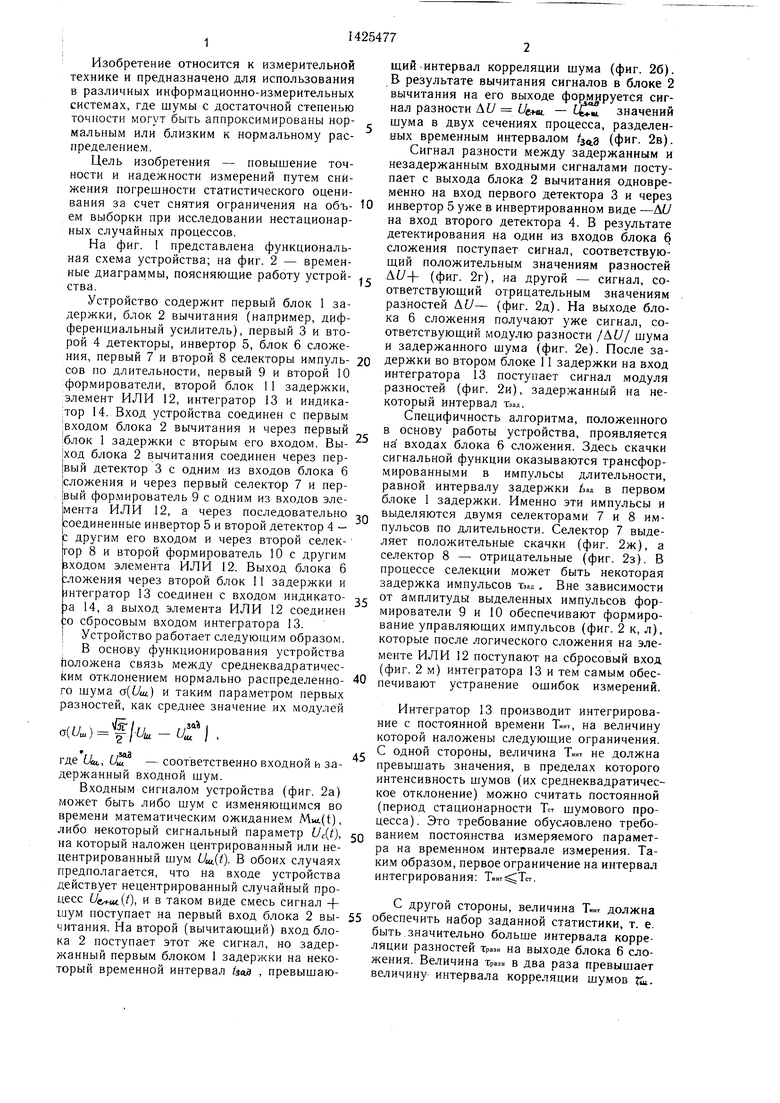
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для приема и обработки информации | 1979 |
|
SU858059A1 |
| Демодулятор фазоманипулированных сигналов с компенсацией помех | 1987 |
|
SU1545332A1 |
| Адаптивное устройство измерения частоты | 1990 |
|
SU1812516A1 |
| Устройство для приема двоичных сигналов | 1988 |
|
SU1573551A1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА И ПЕРЕДАЧИ ШИРОКОПОЛОСНЫХ ШУМОПОДОБНЫХ СИГНАЛОВ | 1979 |
|
SU1840109A1 |
| Устройство для измерения отношения сигнал/шум | 1980 |
|
SU883803A1 |
| Устройство для измерения среднеквадратичного отклонения случайного процесса | 1986 |
|
SU1354209A1 |
| Устройство для воспроизведения запаздывающих функций | 1983 |
|
SU1173424A1 |
| Устройство компенсации сигнала царапин кинопленки | 1986 |
|
SU1392635A1 |
| Устройство передачи и приема шумоподобных сигналов | 1987 |
|
SU1631737A1 |
Изобретение относится к измерительной технике и может быть использовано в различных информационно-измерительных системах, где шумы с достаточной степенью точности могут быть аппроксимированы нормальным или близким к нормальному распределением. Цель изобретения повышение точности и надежности измерений достигается путем снижения погрешности статического оценивания и снятия ограничения на объем выборки при исследовании нестационарных случайных процессов. Для этого в устройство дополнительно введены: блоки 1 и 11 задержки, блок 2 вычитания, детекторы 3 и 4, блок 6 сложения, селекторы 7 и 8 импульсов по длительности, элемент ИЛИ 12 и индикатор 14. Устройство также содержит инвертор 5, формирователи 9 и 10, интегратор 13. В основу функционирования устройства положена связь между среднеквадратичным отклонением нормального распределения шума и таким параметром первых разностей, как, например, среднее значение их модулей. Работа устройства поясняется по временным диаграммам приведенным в описании изобретения. 2 ил. S (Л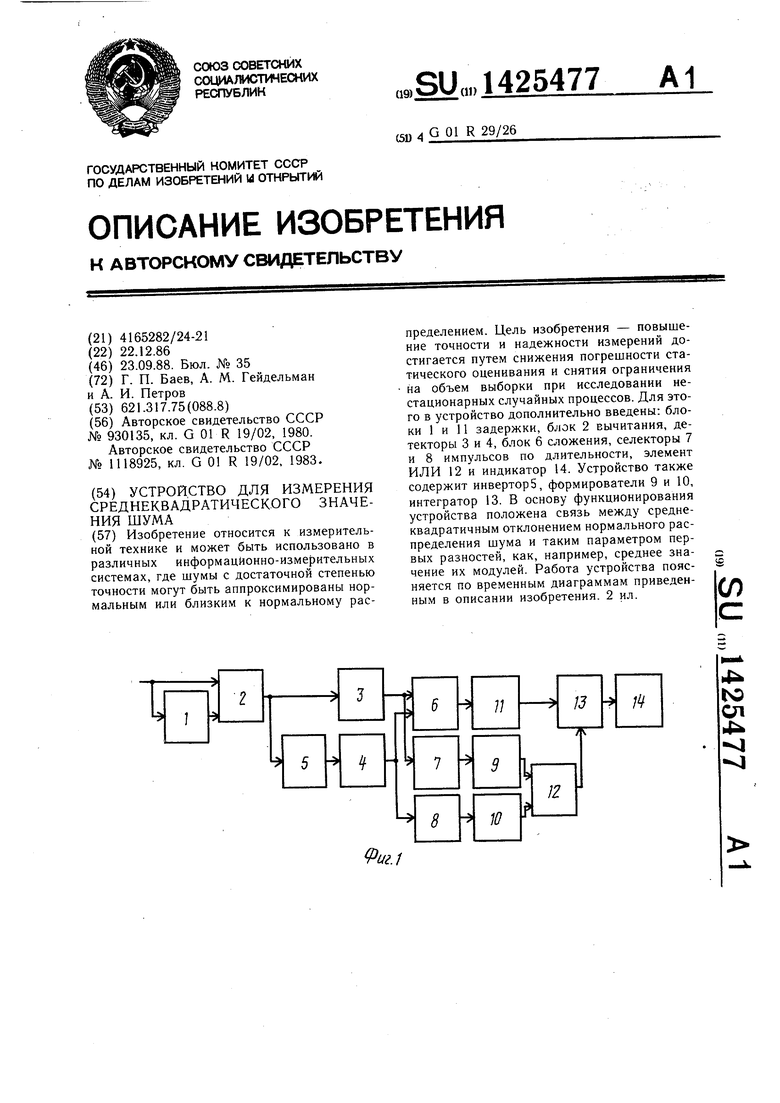
| Устройство для измерения среднеквадратичного значения сигнала | 1980 |
|
SU930135A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения среднеквадратического значения напряжения шума | 1983 |
|
SU1118925A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
