Изобретение относится к техничес :;сой кибернетике и может быть исполь- ог:. в системах автомат яческого
: регулирования .объектами с запаздыва™ киег по состоянию, причем параметры об-ьекта - известные постоянные или медленно меняющиеся во времени вели чины Такими системами являются5 на
пррмер5 системы автоматического уп равления летательными аппаратами, ядерньвш реакторами, ги,цромелиоратнв- ньмк сооружениями и т.д.
Цепь изобретения ущ ощенне кон- cиcтe П)U
На чертеже представлена v;a системы „
Система Содержит объект 1 регулирования j первьй блок 2 задания коэф- физтиентов, блок 3 запаздывания, второй блок 4 задания коэффициентов; дервьй блок 5 суммированияS второй блок 6 суммирования, третий 7 С 5,-.-гагровгния5 первый у1.ножитель-в;, : -гктегратор 9; второй умножитель 10„
CsiCTetra функционирует следуюв им о бразом,
Сигнал у, .,., у.,.: с выходов объекта 1 регулирования поступают одновре™ ненно на соотаетствукоц е входы первого блока 2 задания коэффициентов- и блока 3 запаздывания
Блок 2 задания коэффициентов предстевляет собой блок умножителей. В этом блоке происходит .гмнржение сиг КЕ,па, с выхода обгоекта регулирова 4кя на постоянный каэф|н-)диект. Снгна gf/Tf - вьпсодов блока 2 задания коэффициентов поступают ка соответств укщие входь первого блока 5 суммирования5 где складываются. Сигнал g у с выхода первого блока 5 сут ширования поступает иа первый вход
гретьего блока 7 с ;тмирования« Сигналы y.Ct-u),. ,,y,(t-t)c выходов блока 3 запаздаюания через время, равное времени запазд лвани.я, поступают на соответствующие входа- второго блока 4 задания коэффициентов, где происходит умножение сигнала ), (...m)c i-го выхода блока 3 за- пездывания на постояншл коэффициент g , Сигналы g у, () ,„„,., g. у ,„ (t-ir)- с вьпсодов второго блока 4 задания коэффициентов поступают на соответствующие входы второго блока 6 С у &шрования5 где складываются. Сиг - g y() с выхода второго бло ка 6 сум1-шроэан1-1я поступает на вто0
5
0
5
0
0
0
5
рой вход третьего блока 7 суммирования, где складывается с сигналом g, у, поступающим с выхода первого блока 5 суммирования. Сигнал /itс выхода третьего блока 7 суммирования приходит на оба входа первого умножителя 8 и на первый вход второго умно жителя 10, В первом умножителе 8 происходит у тожение сигнала с выхода третьего блока 7 суммирования на этот же сигнал. С выхода первого умножителя 8 сигнал р К подается на вход интегратора 9, а с выхода интегратора 9 сигнал х подается на второй вход умножителя 10. Во втором умнсйкителе 10 происходит умножение сигнала (И с; выхода третьего блока 7 сз ммирования на сигнал К с выхода интегратора 9 Сигнал U с выхода второго умножителя 10, являющийся сигналом управления, поступает на вход объекта 1 регулирования.
Изобретение позволяет обеспечить ас;имптомическуто устойчивость в системах с объектамиS обладающими запаздыванием, при сутцественном упрощении --конструкции, что снижает стоимость системы, повьшает надежность ее в работе и упрощает техническую реализацию. Формула изобретен игяСамонастраивающаяся система управления, содержащая объект регулирования, первьй блок задания коэффициентов, блок запаздьгоания, второй блок задания коэффициентов, первый блок суммирования, второй блок су фшрования, третий блок суммирования, первый умножитель, интегратор и второй умножитель, выходы объекта регулирования соединены с соответствующими входами первого блока задания коэффициентов и с соответствующими входами блока запаздывания, выходы первого блока задания коэффициентов подключены к входам первого блока суммирования, выходы блока запаздьгеания соединены с соответствующими входами второго блока задания коэффициен- той, выходы которого подключены к входам второго блока суммирования, первьй и второй входы первого умножителя соединены с первым входом второго умножителя, второй вход которого подключен к выходу интегратора, вход которого соединен с выходом первого умножителя, отличающаяся теМэ что, с целью упрощения конструк31425600
ции системы, выходы первого и второ-ход которого соединен с входами пер- го блоков суммирования соединены со-вого умножителя, выход второго умно- ответственно с первым и вторым входа-жителя соединен с входом объекта ми третьего блока суммирования, вы- регулирования.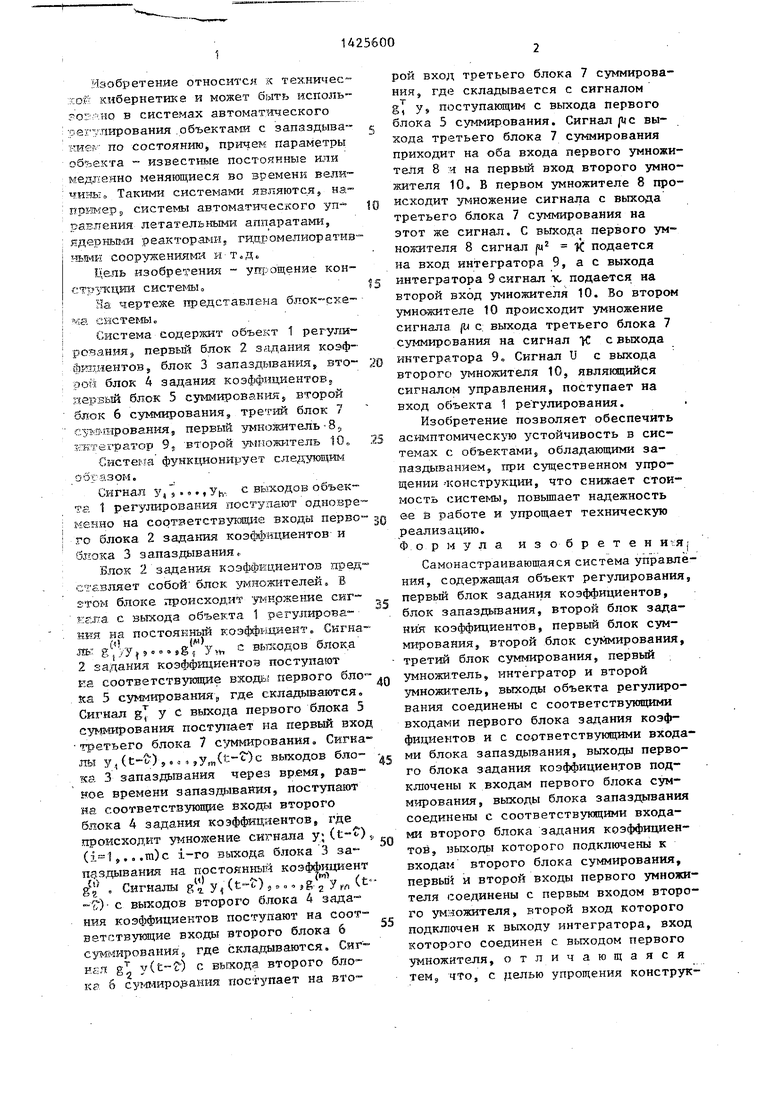
Изобретение относится к технической кибернетике и может быть ис пользовано в системах регулирования объектами с запаздыванием, параметры которых известные или медленно менянпциеся во времени величины. Такитемы автоматического управления летательными аппаратами, ядерными реакторами, гидромелиоративными сооружениями и т.п. Цель изобретения - упрощение конструкции системы. Такое выполнение системы позволяет сохранить асимптотическ то устойчивость системы автоматического управления с объектами, обладакщими запаздыванием, при существенном упрощении конструкции, что снижает стоимость системы, повышает надежность и в работе и упрощает техническую реализацию. Система содержит объект регулирования 1, блоки задания коэффициентов 2, 4, блок запаздьгеания 3, блоки суммирования 5, 6, 7, умножители 8, 10, интегратор 9. 1 ил. (f)
| Самонастраивающаяся система управления | 1982 |
|
SU1019400A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
