Qt
Изобретение относится к автоматике и вычислительной технике и может быть использовано для ввода информации от датчиков дискретных инициативных сигналов в управляющую вычислительную машину, в частности в измерительно-вычислительных комплексах (ИВК) для диагностики и испытаний дви гаталей внутреннего сгорания.
. Цель Изобретения - расширение функциональных возможностей устройства.
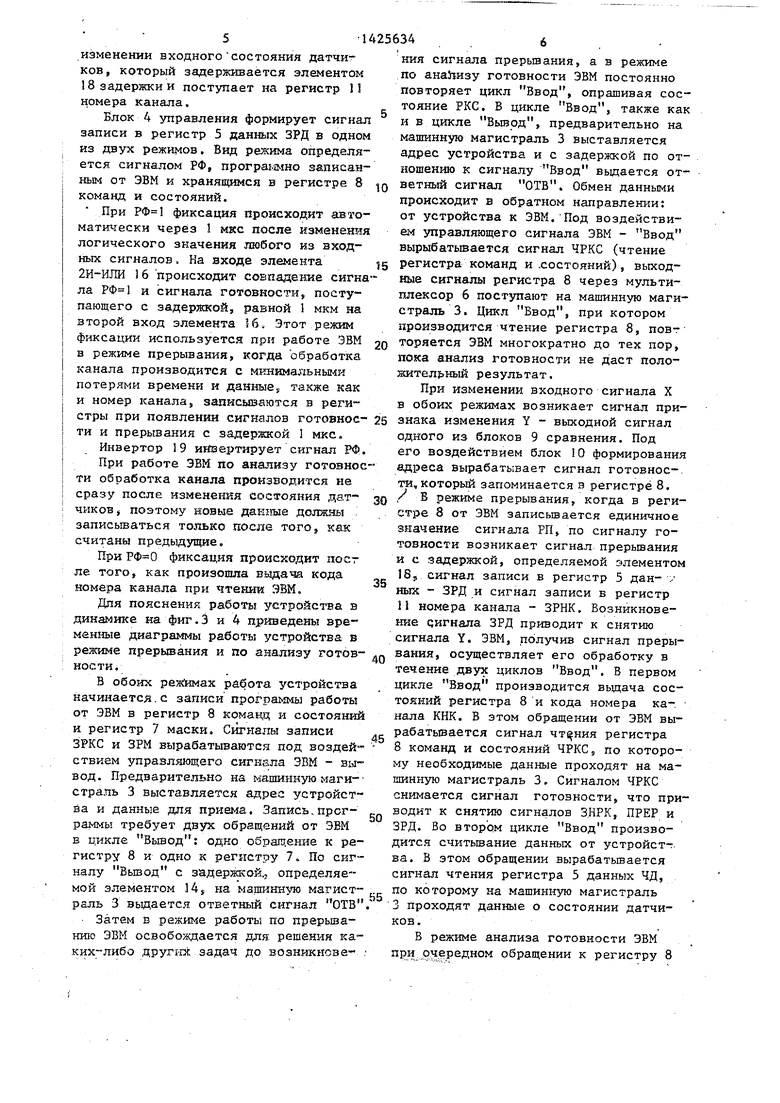
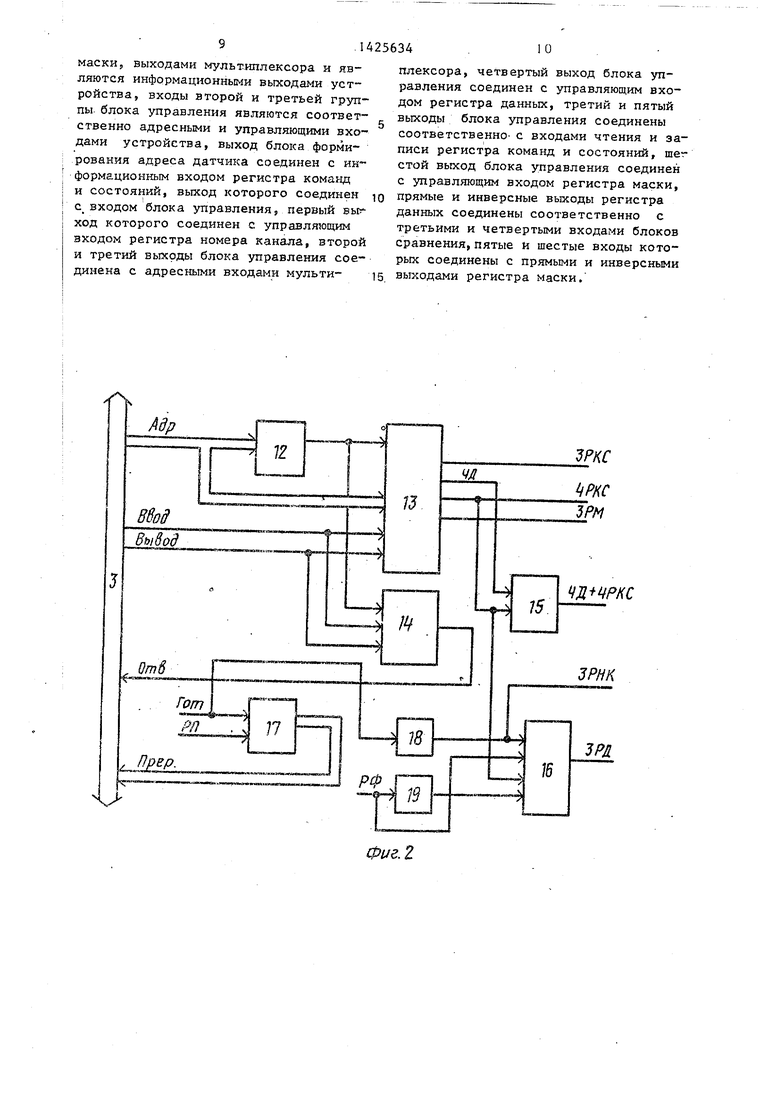
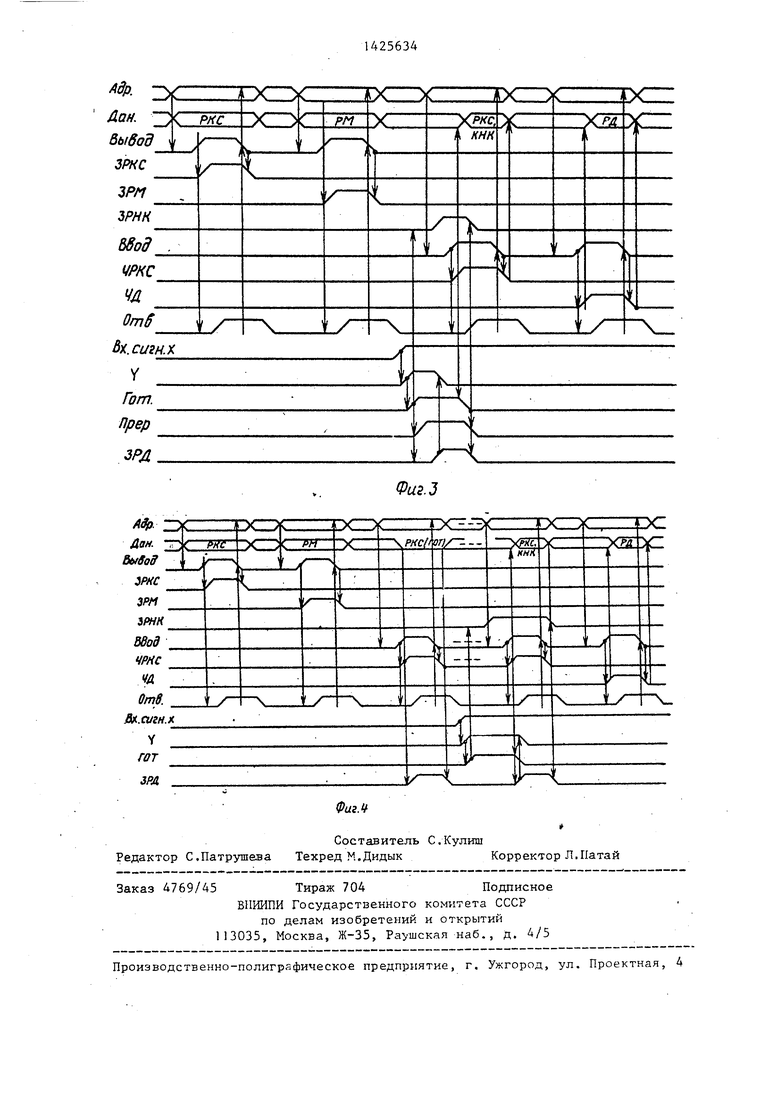
На фиг.I приведена функциональная схема устройства для ввода дискретной информации; На фиг,2 - функциональная схема блока управления} на фиг.3 и 4 - временные диаграммы работы устройства в .режиме прерьшания и по анализу готовности, Устройство для ввода дискретной информации (фиг.1) содержит информационные входы 1, инверторы 2 по числу входных каналов, машинную магистраль 3, блок 4 управления, регистр 5 данных, мультиплексор 6, регистр 7 маски, регистр 8 команд и состояний, блок 9 сравнения, блок 1 О формирования адреса датчика и регистр i 1 номера канала.
Блок 4 управления (фиг,2) содержит селектор 12 адреса, дешифратор 13, блок 14 задержки, элемент ИЛИ 15, элемент 2И-ИЛИ 16, элемент И 17, блок 18 задержки и инвертор 19,
Устройство для ввода дискретной информации работает следующим образом.
Датчики дискретных сигналов выдают данные, поступающие на информационные входы 1 устройства, Сигналы с входов 1 iXo .. .Х соответствуют прямым логическим значениям входных сигналов , Инверторы 2 обеспечивают формирование сигналов Хо....Хп с инверсными логическими значениями входных сигналов . Прямые значения входных сигналов поступают на информационные входы регистра 3 данных, который обеспечивает их фиксацию по сигналу записи .ЗРД, поступающему из блока 4 управления на тактовый вход регистра 5, и вьщачу прямых ХРр,..ХР к инверсных ХРо .. ;ХР значений зафиксированных.. входных сигналов.
Устройство имеет два режима фиксации Р входных сигналов, различающихся моментом выполнения фиксации. Режим фиксации устанавливается программно через регистр 8 команд и,состоя
НИИ с использованием вьщаваемого пос- ледним сигнала РФ, поступающего на управляющий вход блока 4 управления.
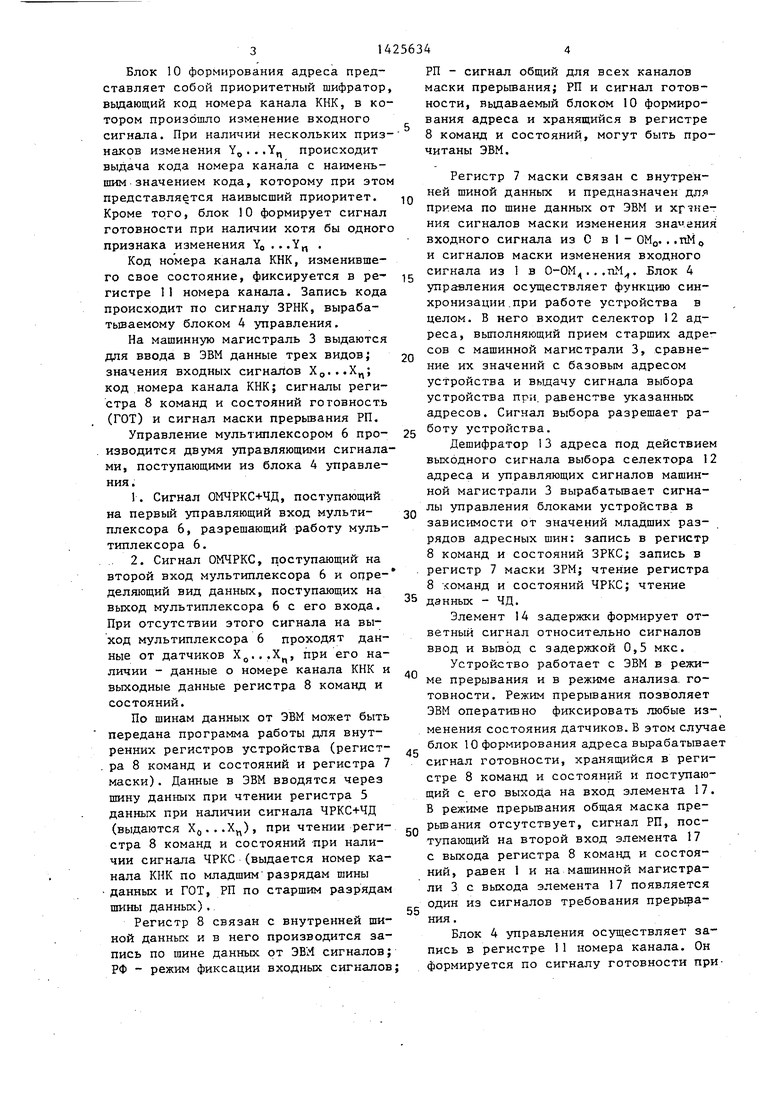
Каждый из блоков 9 сравнения про- изводит сравнение входного сигнала одного из входных каналов Х.,,Х с предьщущим значением этого сигнала XP.,,Xfy, хранящимся в регистре 5 данных, и при отсутствии соответствующего сигнала маски вьадает сигнал признака изменения значения входного сигнала YO,,,, Работа блока 9 сравнения может быть описана следующим логическим выражением.
X ХР MO + X ХР М
Л
где X - значение входного сигнала; ХР - предьщущее значение входного сигнала;
М - сигнал маски изменения значения входного сигнала из О в 1;
М - сигнал маски изменения значения входного сигнала из 1 в 0.
Программируя сигналы масок М и М для каждого канала, можно установить различные условия вьдачи признака Y изменения значения входного сигнала в соответствии с таблицей.
изменении X
из О в 1 ч
Выдается при изменении :Х из 1 в О
Выдается при любом изменении X
Выходные сигналы блоков 9 сравнения, являющиеся признаком изменения значения входного сигнала, поступают на вхоДы блока 10 формирования адреса.
Блок 10 формирования адреса представляет собой приоритетный шифратор, выдающий код номера канала КНК, в котором произошло изменение входного сигнала. При наличии нескольких приз- наков изменения Y,. . .Y, происходит выдача кода номера канала с наименьшим значением кода, которому при этом представляется наивысший приоритет. Кроме того, блок 10 формирует сигнал готовности при наличии хотя бы одного признака изменения YO ...Y .
Код номера канала КНК, изменившего свое состояние, фиксируется в регистре 11 номера канала. Запись кода происходит по сигналу ЗРНК, выраба- тьшаемому блоком 4 управления.
На машинную магистраль 3 выдаются для ввода в ЭВМ данные трех видов; значения входных сигналов Х(,... код номера канала КНК; сигналы регистра 8 команд и состояний готовность (ГОТ) и сигнал маски прерьтания РП.
Управление мультиплексором 6 про- изводится двумя управляющими сигналами, поступающими из блока 4 управления.
1.Сигнал ОМЧРКС+ЧД, поступающий на первый управляющий вход мультиплексора 6, разрешающий работу мультиплексора 6.
2.Сигнал ОМЧРКС, поступающий на второй вход мультиплексора 6 и опре- деляющий вид данных, поступающих на выход мультиплексора 6 с его входа. При отсутствии этого сигнала на выход мультиплексора 6 проходят данные от датчиков Х...Х, при его наличии - данные о номере канала КНК и выходные данные регистра 8 команд и состояний.
По шинам данных от ЭВМ может быть передана программа работы для внутренних регистров устройства (регистра 8 команд и состояний и регистра 7 маски). Данные в ЭВМ вводятся через шину данных при чтении регистра 5 данньпс при наличии сигнала ЧРКС+ЧД (выдаются XQ...Х), при чтении регистра 8 команд и состояний при наличии сигнала ЧРКС (выдается номер канала КНК по младшим разрядам шины данных и ГОТ, РП по старшим разрядам шины данных).
Регистр 8 связан с внутренней шиной данных и в него производится запись по шине данных от ЭВ М сигналов; РФ - режим фиксации входных сигналов;
0
5
5
0
5
0
5
0
5
РП - сигнал общий для всех каналов маски прерьгоания; РП и сигнал готовности, выдаваемый блоком 10 формирования адреса и хранящийся в регистре 8 команд и состояний, могут быть прочитаны ЭВМ.
Регистр 7 маски связан с внутренней шиной данных и предназначен для приема по шине данных от ЭВМ и хранения сигналов маски изменения значения входного сигнала из О в 1 - ОМ. . .пМ и сигналов маски изменения входного сигнала из 1 в 0-ОМ.,.пМ. Блок 4 управления осуществляет функцию синхронизации .при работе устройства в целом. В него входит селектор 12 адреса, выполняющий прием старших адресов с машинной магистрали 3, сравнение их значений с базовым адресом устройства и выдачу сигнала выбора устройства при. равенстве указанных адресов. Сигнал выбора разрешает работу устройства.
Дешифратор 13 адреса под действием выходного сигнала выбора селектора 12 адреса и управляющих сигналов машинной магистрали 3 вырабатьтает сигналы управления блоками устройства в зависимости от значений младших разрядов адресных шин: запись в регистр 8 команд и состояний ЗРКС; запись в регистр 7 маски ЗРМ; чтение регистра 8 .оманд и состояний ЧРКС; чтение данных - ЧД.
Элемент 14 задержки формирует ответный сигнал относительно сигналов ввод и вывод с задержкой 0,5 мкс.
Устройство работает с ЭВМ в режиме прерывания и в режиме анализа, готовности. Режим прерывания позволяет ЭВМ оперативно фиксировать любые из- менения состояния датчиков. В этом случае блок 10 формирования адреса вырабатывает сигнал готовности, хранящийся в регистре 8 команд и состояний и поступающий с его выхода на вход элемента 17. В режиме прерьюания общая маска пре- рьшания отсутствует, сигнал РП, поступающий на второй вход элемента 17 с выхода регистра 8 команд и состояний, равен 1 и на машинной магистрали 3 с выхода элемента 17 появляется один из сигналов требования прерывания .
Блок 4 управления осуществляет запись в регистре 11 номера канала. Он формируется по сигналу готовности приизменении входного состояния датчиков, который задерживается элементом 18 задержки и поступает на регистр II номера канала,
Блок 4 управления формирует сигнал записи в регистр 5 данных ЗРД в одном из двух режимов, Вид режима определяется сигналом РФ, nporpai-a-iHO записанным от ЭВМ и хранящимся в регистре 8 команд и состояний.
При фиксация происходит автоматически через 1 МКС после изменения логического значения любого из входных сигналов. На входе элемента 2И-ИЛИ 16 происходит совпадение сигнала и сигнала готовности, поступающего с задержкой, равной 1 мкм на второй вход элемента б. Этот режим фиксации используется при работе ЭВМ в режиме прерывания, когда обработка канала производится с минимальными потерями времени и даш-ше5 также как и номер канала, записываются в реги
ния сигнала прерьшания, а в режиме по анализу готовности ЭВМ постоянно повторяет цикл Ввод, опрашивая состояние РКС. В цикле Ввод, также как и в цикле Вывод, предварительно на машинную магистраль 3 выставляется адрес устройства и с задержкой по от- гюшению к сигналу Ввод выдается отватный сигнал ОТВ. Обмен данными происходит в обратном направлении: от устройства к ЭВМ. Под воздействием управляющего сигнала ЭВМ - Ввод вырыбатывается сигнал ЧРКС (чтение
регистра команд и .состояний), выходные сигналы регистра 8 через мультиплексор 6 поступают на машинную магистраль 3. Цикл Ввод, при котором производится чтение регистра 8, повг
торяется ЭВМ многократно до тех пор, пока анализ готовности не даст положительный результат.
При изменении входного сигнала X в обоих режимах возникает сигнал при
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сопряжения магистрали ЭВМ с магистралью внешних устройств | 1984 |
|
SU1246105A1 |
| Устройство для сопряжения ЭВМ с общей магистралью | 1987 |
|
SU1456963A1 |
| Двухканальное устройство для сопряжения двух электронно-вычислительных машин | 1988 |
|
SU1587523A2 |
| Устройство для сопряжения двух электронных вычислительных машин | 1984 |
|
SU1251093A1 |
| Устройство для сопряжения ЭВМ с датчиками состояния телефонных линий связи | 1984 |
|
SU1265786A1 |
| Устройство для сопряжения вычислительной машины с линиями связи | 1985 |
|
SU1262512A1 |
| Устройство для обмена информацией | 1987 |
|
SU1497619A1 |
| Устройство для сопряжения ЭВМ в вычислительной системе с децентрализованным арбитром магистрали | 1984 |
|
SU1291997A1 |
| Устройство для программного управления объектом | 1988 |
|
SU1605211A1 |
| Многоканальная система измерения и регистрации | 1988 |
|
SU1707546A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для вво-да информации от датчиков дискретяьтх инициативных сигналов в управляющую вычисли- тельн по машину, в частности в изме- , рительно-вычислительных комплексах для диагностики и испытаний двигателей внутреннего сгорания. Целью изобретения является расширение функциональных..возможностей. Устройство для ввода дискретной информации содержит информационные входы 1, блоки сравнения 9, регистр данных 5, блок 10 формирования адреса датчиков, регистр номера канала 11, блок управления 4, машинную магистраль 3 и лгультиплек- 6. Для достижеш1я поставленной це- ЛИ дополнительно введены инверторы 2 по числу входных каналов, регистр -.; маски 7, регистр 8 команд и состояния.. 4 ил. с (С
стры при появлении сигналов готоакос- 25 знака изменения Y - выходной сигнал
ти и прерывания с задержкой I мкс.
Инвертор 19 инвертирует сигнал РФ.
При работе ЭВМ по анализу готовности обработка канала производится не сразу после изменения состояния датчиков , поэтому новые дангше должны записьюаться только после того, как считаны предьщущие.
При фиксация происходит пост ле того, как произошла выдача кода номера канала при чтении ЭВМ,
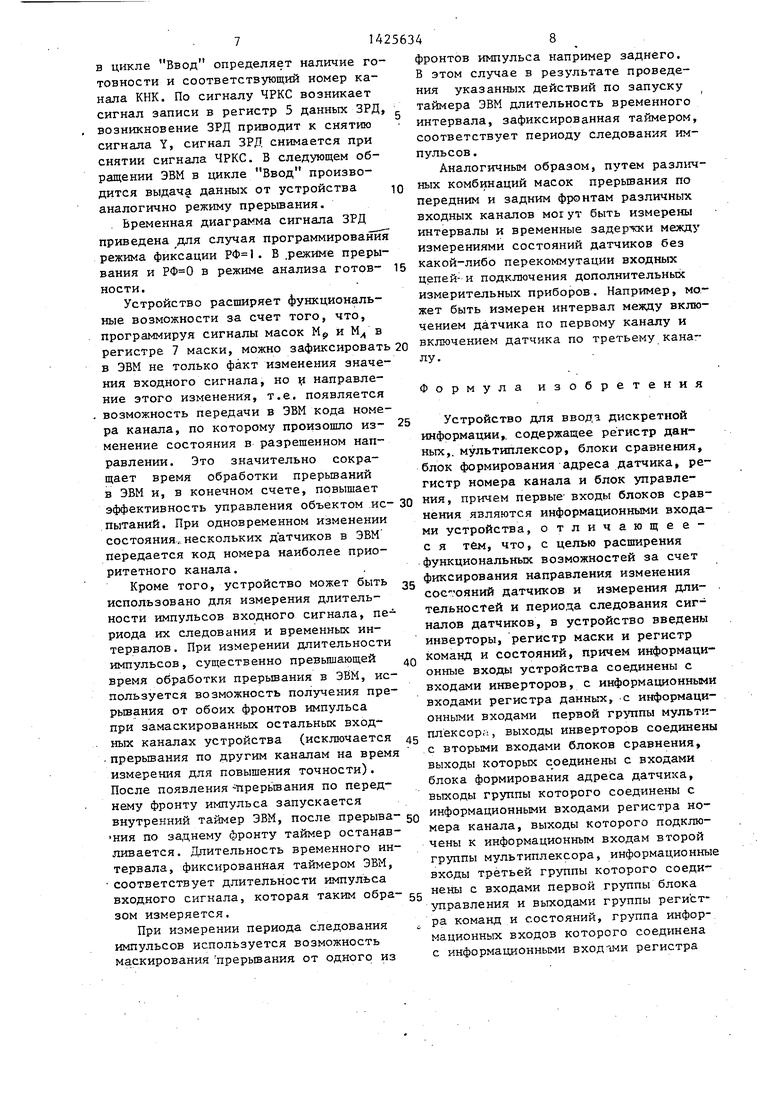
Для пояснения работы устройства в динамике на фиг.3 и 4 приведены временные диаграммы работы устройства в режиме прерывания и по анализу готовности.
В обоих pesteMax работа устройства начинается.с записи программы работы от ЭВМ в регистр 8 комавд и состояний и регистр 7 маски. Сигналы записи ЗРКС и ЗРМ вырабатываютс-ч под воздействием упразляющего сигнала ЭВМ - вывод. Предварительно на машинную магистраль 3 выставляется адрес устройст ва и данные для приема. Запись,программы требует двух обращений от ЭВМ в цикле Вьшод : одно обращение к регистру 8 и одно к регистру 7 По сигналу Вьшод с задержкой., определяемой элементом 14$ на мапшнную магист- раль 3 вьщается ответный сигнал ОТВ
Затем в режиме работы по прерыванию ЭВМ освобождается для решения каких-либо друи-пс задач до возникиова-
0
5
0
одного из блоков 9 сравнения. Под его воздействием блок 10 формирования адреса вырабатывает сигнал готовнос-. ти, который запоминается в регистре 8. X Б режиме прерывания, когда в регистре 8 от ЭВМ записьюается единичное значение сигнала РП, по сигналу готовности возникает сигнал прерьшания и с задержкой, определяемой элементом 18, сигнал записи в регистр 5 дан-;- ных - ЗРД и сигнал записи в регистр П номера канала - ЗРНК. Возникновение сигнала ЗРД приводит к снятию сигнала Y. ЭВМ, получив сигнал прерывания, осуществляет его обработку в течение двух циклов Ввод. В первом цикле Ввод производится выдача состояний регистра 8 и кода номера канала КНК. В этом обращении от ЭВМ вы- рабатьюается сигнал чтения регистра В команд и состояний ЧРКС, по которому необходимые данные проходят на машинную магистраль 3. Сигналом ЧРКС снимается сигнал готовности, что приводит к снятию сигналов З.НРК, ПРЕР и ЗРД. Во втором цикле Ввод производится считывание данных от устройст- ва. В этом обращении вырабатьшается сигнал чтения регистра 5 данных ЧД, . по которому на машинную магистраль 3 проходят данные о состоянии датчиков.
В реж1-1ме анализа готовности ЭВМ при очередном обращении к регистру 8
0
71
в цикле Ввод определяет наличие готовности и соответствующий номер канала КНК. По сигналу ЧРКС возникает сигнал записи в регистр 5 данных ЗРД возникновение ЗРД приводит к снятию сигнала Y, сигнал ЗРД снимается при снятии сигнала ЧРКС. В следующем обращении ЭВМ в цикле Ввод производится выдача данных от устройства аналогично режиму прерьшания.
. Временная диаграмма сигнала ЗРД приведена для случая программировани режима фиксации . В .режиме прерывания и в режиме анализа готов- ности.
Устройство расширяет функциональные возможности за счет того, что,
программируя сигналы масок М и М в регистре 7 маски, можно зафиксировать 20 в ЭВМ не только факт изменения значения входного сигнала, но i направление этого изменения, т.е. появляется возможность передачи в ЭВМ кода номера канала, по которому произошло из- 25 менение состояния в разрешенном направлении. Это значительно сокращает время обработки прерываний в ЭВМ и, в конечном счете, повышает
Аналогичным образом, путем различных комбинаций масок прерьшания по передним и задним фронтам различных входных каналов мог ут быть измерены интервалы и временные задержки между измерениями состояний датчиков без какой-либо перекоммутации входных цепей- и подключения дополнительных измерительных приборов. Например, может быть измерен интервал между включением датчика по первому каналу и включением датчика по третьему каналу.
Формула изобретения
Устройство для ввода дискретной информации,, содержащее регистр данных,, мультиплексор, блоки сравнения, блок формирования адреса датчика, регистр номера канала и блок управле35
эффективность управления объектом ис- 30 «««. причем первые входы блоков сравнения являются информационными входами устройства, отличающее- с я тбм, что, с целью расБшрения функциональных возможностей за счет фиксирования направления изменения сосг ояний датчиков и измерения длительностей и периода следования сигналов датчиков, в устройство введены инверторы, регистр маски и регистр команд и состояний, причем информационные входы устройства соединены с входами инверторов, с информационными входами регистра данных, с информационными входами первой группы мультиплексора , выходы инверторов соединены с вторьми входами блоков сравнения, выходы которых соединены с входами блока формирования адреса датчика, выходы группы которого соединены с
пытаний. При одновременном изменении состояния, нескольких датчиков в ЭВМ передается код номера наиболее приоритетного канала.
Кроме того, устройство может быть использовано для измерения длительности импульсов входного сигнала, периода их следования и временных интервалов . При измерении длительности импульсов, существенно превьш1ающей время обработки прерьшания в ЭВМ, используется возможность получения прерьшания от обоих фронтов импульса при замаскированных остальных входных каналах устройства (исключается прерывания по другим каналам на время измерения для повышения точности). После появления Т1рерьшания по переднему фронту импульса запускается
40
45
внутренний таймер ЭВМ, после прерыва- 50 информационными входами регистра номера канала, выходы которого подключены к информационным входам второй группы мультиплексора, информационные входы третьей группы которого соедикоторая таким обра- 55 ™ входами первой группы блока
управления и выходами группы регистра команд и состояний, группа информационных входов которого соединена с информационными вход-ти регистра
ния по за,цнему фронту таймер останавливается. Длительность временного интервала, фиксированная таймером ЭВМ, соответствует длительности импульса входного сигнала зом измеряется.
При измерении периода следования импульсов используется возможность маскирования прерьюания от одного из
фронтов импульса например заднего. В этом случае в результате проведения указанных действий по запуску таймера ЭВМ длительность временного интервала, зафиксированная таймером, соответствует периоду следования импульсов .
Аналогичным образом, путем различных комбинаций масок прерьшания по передним и задним фронтам различных входных каналов мог ут быть измерены интервалы и временные задержки между измерениями состояний датчиков без какой-либо перекоммутации входных цепей- и подключения дополнительных измерительных приборов. Например, может быть измерен интервал между включением датчика по первому каналу и включением датчика по третьему каналу.
Формула изобретения
Устройство для ввода дискретной информации,, содержащее регистр данных,, мультиплексор, блоки сравнения, блок формирования адреса датчика, регистр номера канала и блок управле35
30
30
40
30
45
маски, выходами мультиплексора и являются информационными выходами уст ройства, входы второй и третьей группы блока управления являются соответственно адресными и управляющими вхо дами устройства, выход блока форми- .рования адреса датчика соединен с информационным входом регистра комаад и состояний, выход которого соединен с входом блока управления j первый вьс ход которого соединен с управляющим входом регистра номера канала, второй и третий выходы блока управления соединена с адресными входами мульти-
плексора, четвертый выход блока управления соединен с управляющим входом регистра данных, третий и пятый выходы блока управления соединены соответственно с входами чтения и записи регистра команд и состояний, шег стой выход блока управления соединен с управляющим входом регистра маски, прямые и инверсные выходы регистра данных соединены соответственно с третьими и четвертыми входами блоков сравнения, пятые и шестые входы которых соединены с прямыми и инверсными вьпсодами регистра маски.
Фиг. 2
| Устройство для сопряжения | 1979 |
|
SU824185A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| УСТРОЙСТВО для СБОРА ИНФОРМАЦИИ от ДИСКРЕТНЫХ ДАТЧИков | 0 |
|
SU377759A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
