ф1/г
Р1зобретение относится к технике радиосвязи и может найти применение . при построении радиорелейных систем передачи, а также систем радиосвязи с:подвижными объектами.
: Цель изобретения - повьппение помехоустойчивости.
На фиг.1 изображена структурная электрическая схема автокорреляцион- нрго демодулятора сигналов с фазо- р зностной модуляцией первого поряд- на фиг.2 - векторные диаграммы ср1гналов.
i Автокорреляционный демодулятор сигналов с фазоразностной модуляцией первого порядка.содержит гетеро- д|ин 1, смеситель 2, полосовой фильтр 3, блок 4 задержки, первый перемно- л(итель 5, первьЕй интегратор 6, пер- йый блок 7 вычисления знака, первый фшрямитель 8, фазовращатель 9, вто- 1|ой перемножитель 10, второй выпря- 1|итель 11, второй интегратор 12, блок |3 вычисления косинуса, первый комму- tETOp 14, третий перемножитель 15, Сумматор J6, четвертый перемножитель |7, третий интегратор J8, блок 19 вычисления синуса, второй коммутатор 20, пятый перемножитель 2 1 ,вычитатель 22 и второй блок 23 вьшисления знака.
Автокорреляционный демодулятор сигналов с фазоразностной модуляцией первого порядка работает следующим образом,
Номинальная частота гетеродина 1 выбирается таким образом, что номинальная частота несущего колебания на выходе фильтра 3 удовлетворяет соотношению
2л . FT- ,
Wo k 2 :Г. F (1)
где k - целое число;
номинальная частота-сигнала
на выходе фильтра 3; F;- - тактовая частота. В этом случае при отсутствии манипуляции разность фаз двух соседних
посылок составляет . Соответст
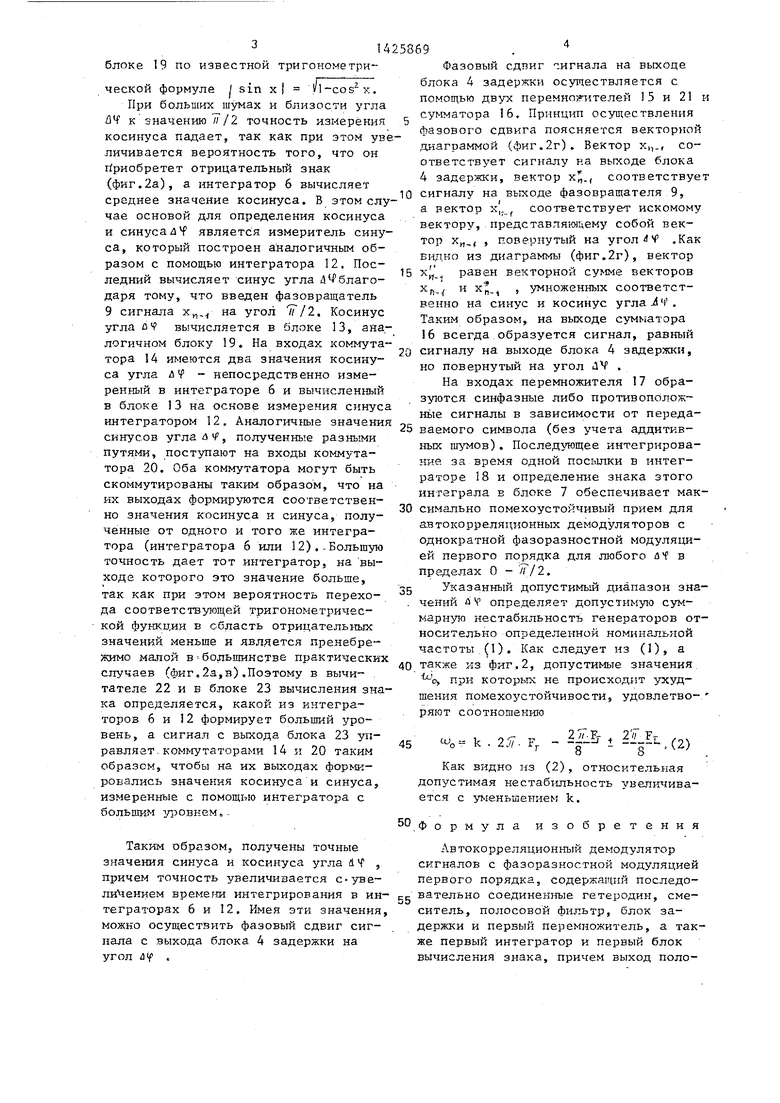
вующие сигнальные векторы изображены на фиг.2а, соответствующие сигналы на двух соседних посьтках на фиг.2б. В случае;, когда информационные параметры соседних посьшок разные, один из векторов, например, х имеет противоположную фазу (фиг.2в). В результате нестабильности генераторов и гетеродинов, входящих в состав канала
5 0 5 0
5
0
5
0
5
связи,угол между векторами соседних посылок может отличаться от изображенного (фиг,2а и в). Однако, если нестабильности таковы, что разность фаз меясду BexTOpaNm (фиг.2а) лежит в пределах О - л/2, то косинус и синус угла Л Ч не меняют своего знака. Таким образом, если с достаточной точностью измерить синус и косинус угла j4 f , то можно осуществить поворот фазы -вектора х таким образом, что в случае фиг.2а он совпадал по фазе с вектором х„, , и ему противоположен в случае фиг.2в. Б этом случае компенсируется фазовый сдвиг и сигналы соседних посылок могут быть либо синфазными, либо протт вополож- ными в зависимости от передаваемого информационного символа. При этом реализуется максимально возможная при автокорреляционном приеме помехоустойчивость.
Таким образом, в предлагаемом демодуляторе производится точное измерение модулей синуса и косинуса разностей фаз между соседними посылками, поворот фазы задержанного на длительность посьтки сигнала и собственно автокорреляционный прием,-т.е. вьшис- ление знака косинуса разности фаз текущей посылки и сигнала пре;р1.дущей j посылки, повернутого по фазе наутоп/ , i
Измерение косинуса разности фаз соседних посьшок осуществляется с помощью интегратора 6, на вход которого поступает вьтрямленный в выпрямителе 8 сигнал с выхода перемножителя 5. На выходе последнего формируется произведение сигналов на входе и выходе блока 4 задержки на один тактовый интервал. Указанная опера- -ция имеет следующий математический вид:
АК.-
со8Д а х (t) x(t) . dt
о
где tfl - время интегрирования.
Поскольку может иметь , личный знак в зависимости от передаваемой информации, то измерить можно только его модуль, так как он неизменен во времени (фиг.2а,в). Увеличе- ьшем времени интегрирования интегратора 6 можно сколь угодно повысить точность измерения угла и / (фиг,.2а,в) и избавиться таким образом от влияния на его измерение аддитивных шумов. Синус угла af вычисляется в
314
блоке 9 по известной тригонометриsin X 1/1
-cos X.
ческой формуле
При больших шумах и близости угла ДЧ к значению 7/2 точность измерения косинуса падает, так как при этом увличивается вероятность того, что он гфиобретет отрицательный знак (фиг.2а), а интегратор 6 вычисляет среднее значение косинуса. В этом случае основой для определения косинуса и синуса л f является измеритель синуса, который построен аналогичным образом с помощью интегратора 12, Последний вычисляет синус угла Л благодаря тому, что введен фазовращатель 9 сигнала х„ на угол TT/Z. Косинус угла йЧ вычисляется в блоке 13, ана
15 х,,, равен векторной сумме векторов Xf, и х. , умноженных соответственно на синус и косинус угла d 4, Таким образом, на выходе сумматора 6 всегда образуется сигнал, рав1Л й
логичном блоку 19, На входах коммута-к /
20 сигналу на выходе блока 4 задержки,
тора 14 имеются два значения косину-„ .хл
,.но повернутый на угол aV
са угла и Ч - непосредственно измеренный в интеграторе 6 и вычисленный
На входах перемножителя 17 образуются синфазные либо противоположНа входах перемножителя 17 образуются синфазные либо противоположв блоке 13 на оскове измерения синуса
, „ .ные сигналы в зависимости от передаинтегратором 12. Аналогичные значения о,-/,.
„25 Баемого символа (без учета аддитквсинусов угла d / , полученные pa3HbLMH путями, поступают на входы коммутатора 20. Оба коммутатора могут быть скоммутированы таким образом, что на их выходах формируются соответственно значения косинуса и синуса, полученные от одного и того же интегратора (интегратора 6 или 12).-Большую точность дает тот интегратор, на выходе которого это значение больше, так как при этом вероятность перехода соответствзлощей тригонометричес- кой функции, в область отрицатель шх значений меньше и является пренебрежимо малой в большинстве практих1еских случаев (фиг.2з,в).Поэтому в вычи- тателе 22 и в блоке 23 вычисления знака определяется, какой из интеграторов 6 и 2 формирует больший уровень, а сигнал с выхода блока 23 управляет, коммутаторами 14 и 20 таким образом, чтобы на их выходах формировались значения косинуса и синуса, измеренные с помощью интегратора с большим у эовнем...
ных ) . Последующее интегрирование за время одной посьшки в интеграторе 18 и определение знака этого интеграла в блоке 7 обеспечивает мак30 симально помехоустойчивый прием для автокорреляционных демодуляторов с однократной фазоразностной модуляцией первого порядка для любого и в пределах О - ///2.
Указанный допустимый диа.пазон значений ДУ определяет допустимую суммарную нестабильность генераторов относительно определенной номинальной частоты. 1). Как следует из (1), а
40 также из фиг,2, допустимые значения. с, при которых не происходит ухудшения помехоз стойчивости, удовлетво-. ряют соотношению
35
45
о- k . 2JJ- F,
„ . 2:LFr. (,} 8 8
Как видно нз (2), относительная допустимая нестабильность увеличивается с уменьшением k.
,Формула изобретения
Фазовый сдвиг сигнала на выходе блока 4 задержки осуществляется с помощью двух перемноетлтелей 15 и 21 и сумматора 16, Принцип осуществления фазового сдвига поясняется векторной диаграммой (фиг.2г). Вектор х., соответствует сигналу на выходе блока 4 задержки, вектор х., соответствует сигналу на выходе фазовращателя 9, а вектор Х|. соответствует искомому вектору, представляющему собой вектор х„( , повернутый на угол Ч .Как видно из диаграммы (фиг.2г), вектор
15 х,,, равен векторной сумме векторов Xf, и х. , умноженных соответственно на синус и косинус угла d 4, Таким образом, на выходе сумматора 6 всегда образуется сигнал, рав1Л й
к /
На входах перемножителя 17 образуются синфазные либо противоположных ) . Последующее интегрирование за время одной посьшки в интеграторе 18 и определение знака этого интеграла в блоке 7 обеспечивает мак30 симально помехоустойчивый прием для автокорреляционных демодуляторов с однократной фазоразностной модуляцией первого порядка для любого и в пределах О - ///2.
Указанный допустимый диа.пазон значений ДУ определяет допустимую суммарную нестабильность генераторов относительно определенной номинальной частоты. 1). Как следует из (1), а
40 также из фиг,2, допустимые значения. с, при которых не происходит ухудшения помехоз стойчивости, удовлетво-. ряют соотношению
35
45
о- k . 2JJ- F,
„ . 2:LFr. (,} 8 8
Как видно нз (2), относительная допустимая нестабильность увеличивается с уменьшением k.
,Формула изобретения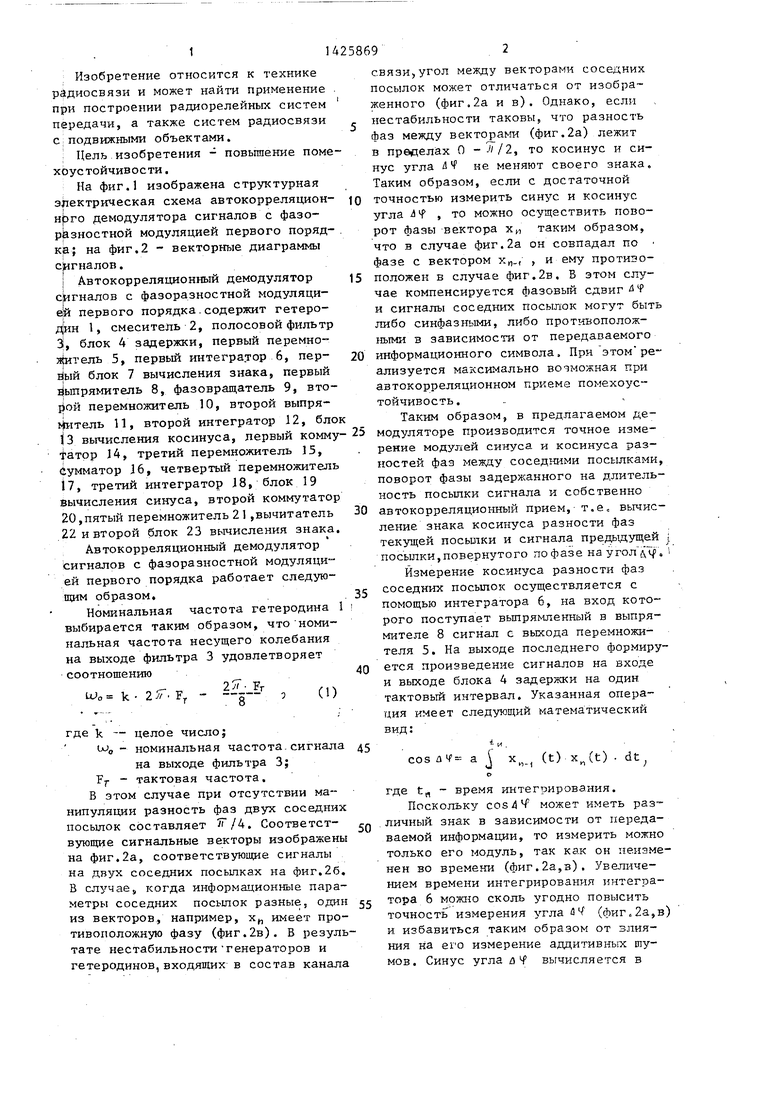
| название | год | авторы | номер документа |
|---|---|---|---|
| Демодулятор сигналов с фазоразностной модуляцией | 1978 |
|
SU790361A1 |
| Устройство для приема дискретных сообщений | 1986 |
|
SU1322499A1 |
| Автокорреляционный демодулятор псевдослучайных сигналов с относительной фазовой модуляцией второго порядка | 2017 |
|
RU2660594C1 |
| Устройство для автокорреляционного приема сигналов с фазоразностной модуляцией первого порядка | 1986 |
|
SU1363518A2 |
| Демодулятор сигналов с фазоразностной модуляцией | 1978 |
|
SU720782A1 |
| Демодулятор дискретных сигналов с фазоразностной модуляцией | 1983 |
|
SU1160595A1 |
| Демодулятор сигналов с фазоразностной модуляцией | 1980 |
|
SU949838A1 |
| Демодулятор многочастотных сигналов с фазоразностной модуляцией | 1981 |
|
SU995367A1 |
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ ДЕМОДУЛЯТОРА СИГНАЛОВ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ ВЫСОКИХ ПОРЯДКОВ | 2018 |
|
RU2693272C1 |
| Частотный дискриминатор | 1978 |
|
SU790252A1 |

Изобретение относится к радиосвязи. Цель изобретения - повышение помехоустойчивости. Устр-гво содержит гетеродин 1, смеситель 2,.полосовой фильтр 3, блок задержки 4, перемножители 5, 10, 15, 17 и 21, интеграторы 6, 12 и 18э блоки вычисления (БВ) 7 и 23 знака, выпрямители 8 и 11, фазовращатель 9, БВ 13 косинуса, коммутаторы 14 и 20, сумматор 16, БВ 19 синуса и вычитатель 22. В устр- ве производятся точное измерение модулей синуса и косинуса разностей фаз между соседними посьижами, поворот фазы задержанного на длительность посылки сигнала и собственно автокорреляционный прием, т.е. вычисление знака косинуса разности фаз текущей посьшки и сигнала предьщущей посылки, повернутого по фазе на угол Ч. В случае компенсации фазового сдвига & сигналь: соседних посылок м.б. либо синфазными, либо противоположными в зависимости от передаваемого информационного символа. При этом реализуется максимально возможная при автокорреляционном приеме помехоустойчивость. 2 ил. (/
Таким образом, получены точные значения синуса и косинуса угла d Ч , причем точность увеличивается с-увеЛвтокорреляционный демодулятор сигналов с фазоразностной модуляцией первого порядка, содержащий последо- лиЧением времегш интегрирования в ин- gg вательно соединенные гетеродин, сме- теграторах 6 и 12. Имея эти значения, ситель, полосовой фильтр, блок задержки и первый перемножитель, а также первый интегратор и первый блок вычисления знака, причем выход поломожно осуществить фазовый сдвиг сигнала с выхода блока 4 задержки на угол dV
сового фильтра соединен с вторым входом первого перемножителя, второй йход смесителя является входом автокорреляционного демодулятора, а вы- код первого блока вы исления знака является выходом автокорреляционного демодулятора, отличающий- с я тем, что, с целью повышения помехоустойчивости, введены первый вы- прямитель, последовательно соединенные фазовращатель, второй перемножитель, второй выпрямитель, второй ин- агегратор, блок вычисления косинуса, Первый коммутатор, третий перемножи- {тель, сумматор, четвертый перемножи- |твль и третий интегратор, последовательно соединенные блок вычисления синуса, второй коммутатор и пятый пе ремножитель, а также последовательно соединенные вычитатель и второй блок вычисления знака, выход которого соеа Лд./
uf
Ха-1
Редактор Н.Бобкова
Составитель И.Котиков
Техред М.Ходанич Корректор В.Романенко
динен с вторыми входами первого и : второго коммутаторов, выход полосового фильтра подключен к вторым входам второго и -четвертого перемножи- .телей, выход блока задержки соединен с вторым входом третьего перемножителя и с входом фазовращателя, выход которого подключен к второму входу пятого перемножителя, выход первого интегратора соединен с входом блока вычисления синуса, с третьим входом первого коммутатора и с первым входом вычитателя, выход второго интегратора подключен к третьему входу второго коммутатора и к второму входу вычитателя, выход первого перемножите ля соединен с входом первого выпрямителя, выход которого подключен к входу первого интегратора, а выход пятого перемножителя соединен с вторым входом сумматора.
| Окунев Ю.Б | |||
| Теория фазоразност- ной модуляции | |||
| - М.: Связь, 1979, с.125, рис.4.3. |
