Изобретение относится к медицинской тех- |нике, а именно к устройствам для изме- |рения силы и выносливости различных мышц человека, и может быть использовано в медицинской и спортивной практике.
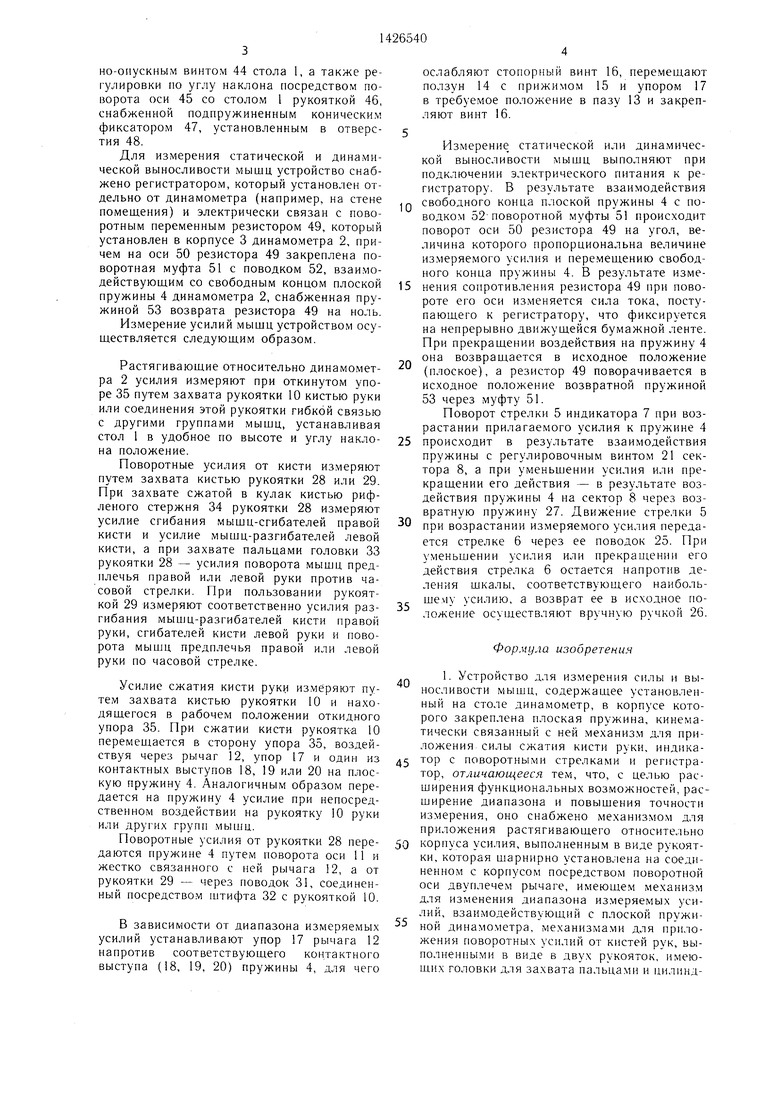
Цель изобретения - расширение функ- 1 циональных возможностей, расширение диа- назона и повышение точности измерений силы и выносливости мышц человека, а так- i же обеспечение удобства позы пациента и I повышение удобства в эксплуатации. 1 На фиг. 1 показано описываемое устрой- I ство, вид сбоку; на фиг. 2 - разрез А-А на ; фиг. 1; на фиг. 3 - вид Б на фиг. 1 с час- i тичным местным разрезом; на фиг. 4 - раз- j рез В-В на фиг. 3; на фиг. 5 - разрез Г - Г I на фиг. 1.
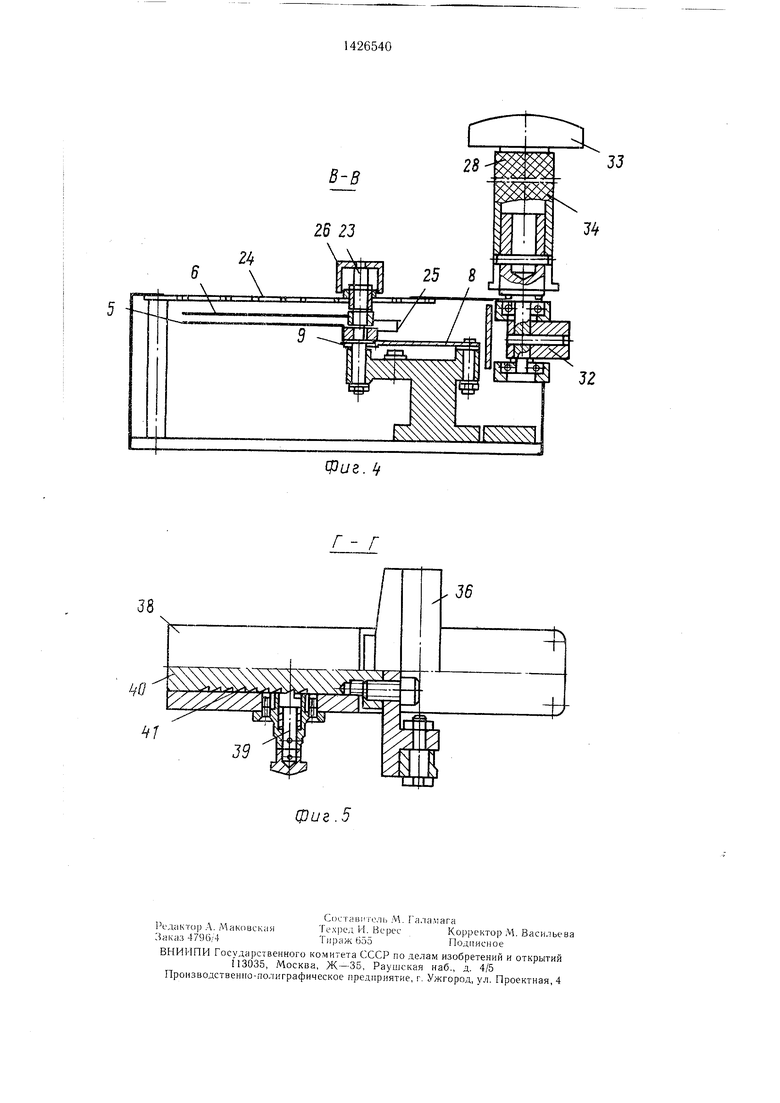
Устройство для измерения силы и вынос- ливости мышц содержит закрепленный на столе 1 динамометр 2, в корпусе 3 кото- рого защемлена одним концом плоская нру- жина 4 с возможностью взаимодействия ее второго (свободного) конца с поворотными стрелками 5 и 6 индикатора 7 через зубчатый сектор 8 и пдестерню 9. Динамометр 2 снабжен механизмом для приложения растя- гиваюти.х относительно корпуса 3 усилий, выполненным в виде рукоятки 10, которая шарнирно установлена на соединенном с корпусом 3 посредством поворотной оси 11 двуплечем рычаге 12, снабженном воздействующим на плоскую пружину 4 механизмом для изменения диапазонов измеряемых усилий, выполненным в виде установленных с возможностью перемещения в продольном пазу 13 рычага 12 ползуна 14 с прижимом 15, соединенных между собой стопорным винтом 16, причем в ползуне 14 установлен упор 17, взаимодействующий с плоской пружиной 4 через ее контактные выступы 18-20, установленные на расчетных расстояниях Ь, 12, 1з от точки ее защемления в корпусе 3. Свободный конец пружины 4 кинематически связан с поворотными стрелками 5 и 6 индикатора 7 через установленный на зубчатом секторе 8 регулировочный винт 21 с гайкой 22, причем стрелка 5 жестко соединена с шестерней 9, а стрелка 6 установлена на оси 23, закрепленной на шкале 24 индикатора 7, соединена со стрелкой 5 посредством ее поводка 25 и снабжена ручкой 26 возврата в исходное положение. Для возврата в исходное положение при снятии нагрузки с рычага 12 сектор 8 выполнен с плоской пружиной 4 посредством спиральной пружины 27. Шкала индикатора 7 имеет градуировки для измерения различных диапазонов прилагаемых усилий.
Расстояния 1|, Ь и 1з (см) от точки защемления пружины 4 в корпусе 3 до контактных выступов 18-20 определяются из следу юп1.их зависимостей:
12
где PI, РЗ, РЗ - величина усилий (в килог- раммах), приложенных к рукоятке 10 и измеряемых по шкале 24 при взаимодействии упора 17 с контактными выступами 18, 19 и 2Т) соответственно пружины 4;
1 - расстояние от точки защем- ления пружины 4 до точки ее взаимодействия с регулировочным винтом 21 зубчатого сектора 8, см;
b - расстояние от оси крепления рукоятки 10 к рычагу 12 до его поворотной оси 11 перпендикулярно линии дей- ствия усилий РЬ Р2 или РЗ, см;
bi, Ьг, Ьз - расстояния от поворотной оси 11 рычага 12 до контактных выступов 18, 19, 20 пружины 4, см;
f - величина прогиба пружины 4 в точке взаимодействия с винтом 21 зубчатого сектора В под действием усилий Р|, Р2 или РЗ, см;
Е - модуль упругости (для стали Е 2-10 кг/см-);
25
см
момент инерции пружины.
0
5
где b - ширина, h - толщина пружины. Устройство снабжено механизмами для приложения поворотных усилий от кистей рук, выполненными в виде двух рукояток 28 и 29, причем рукоятка 28 установлена на поворотной оси 11 рычага 12, а рукоятка 29 - на оси 30 и кинематически связана с осью 11 с возможностью ее поворота в направлении, противоположном повороту этой рукоятки, например посредством поводка 31, соединяющего ее с рукояткой 10 штифтом 32. Каждая из рукояток 28 и 29 выполнена с головкой 33 для захвата пальцами руки и с рифлены.м
0 цилиндрическим стержнем 34 для захвата кистью.
Механизм для приложения усилий сжатия кисти руки выполнен в виде закрепленного на столе 1 откидного упора 35, захватная часть 36 которого установлена па раллельно захватной части 37 рукоятки 10 для приложения растягивающих усилий на расстоянии «С, удобном для захвата кистью руки, с возможностью регулировки этого расстояния путем перемещения упора 35
Q в корпусе 38 и его фиксации подпружиненным зубчатым фиксатором 39, взаимодействующим с выполненной на ползуне 40 упора 35 насечкой 41.
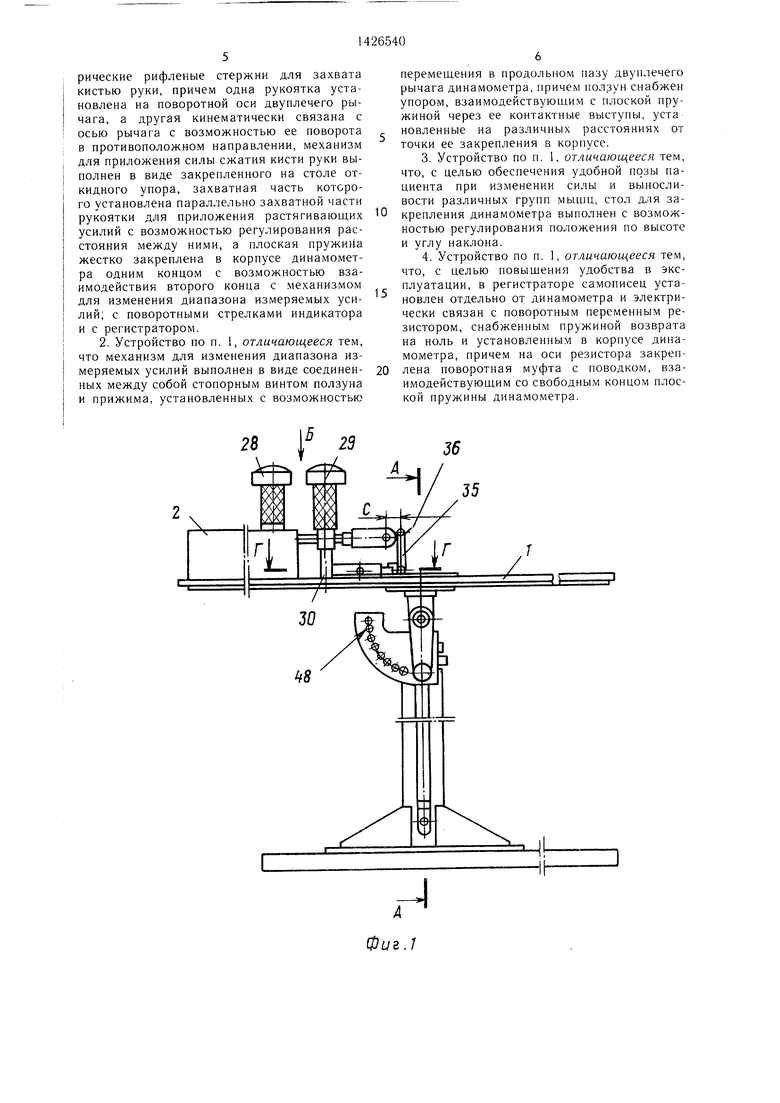
С целью обеспечения удобной позы пациента при измерении усилий и выносли5 вости различных групп мышц стол 1 выполнен с возможностью регулировки по высоте путем вращения установленной в его стойке 42 гайки 43, взаимодействующей с подъемно-оиускным винтом 44 стола 1, а также регулировки по углу наклона посредством поворота оси 45 со столом 1 рукояткой 46, снабженной подпружиненным коническим фиксатором 47, установленным в отверстия 48.
Для измерения статической и динамической выносливости мышц устройство снабжено регистратором, который установлен отдельно от динамометра (например, на стене помеоления) и электрически связан с поворотным переменным резистором 49, который установлен в корпусе 3 динамометра 2, причем на оси 50 резистора 49 закреплена поворотная муфта 51 с поводком 52, взаимодействующим со свободным концом плоской пружины 4 динамометра 2, снабженная пружиной 53 возврата резистора 49 на ноль.
Измерение усилий мышц устройством осуществляется следующим образом.
Растягивающие относительно динамометра 2 усилия измеряют при откинутом упоре 35 путем захвата рукоятки 10 кистью руки или соединения этой рукоятки гибкой связью с другими группами мыщц, устанавливая стол 1 в удобное по высоте и углу наклона положение.
Поворотные усилия от кисти измеряют путем захвата кистью рукоятки 28 или 29. При захвате сжатой в кулак кистью рифленого стержня 34 рукоятки 28 измеряют усилие сгибания мыщц-сгибателей правой кисти и усилие мышц-разгибателей левой кисти, а при захвате пальцами головки 33 рукоятки 28 - усилия поворота мышц предплечья правой или левой руки против часовой стрелки. При пользовании рукояткой 29 измеряют соответственно усилия разгибания мышц-разгибателей кисти правой руки, сгибателей кисти левой руки и поворота мышц предплечья правой или левой руки по часовой стрелке.
Усилие сжатия кисти руки измеряют путем захвата кистью рукоятки 10 и нахо- дяшегося в рабочем положении откидного упора 35. При сжатии кисти рукоятк-а 10 перемешается в сторону упора 35, воздействуя через рычаг 12, упор 17 и один из контактных выступов 18, 19 или 20 на плоскую пружину 4. Аналогичным образом передается на пружину 4 усилие при непосредственном воздействии на рукоятку 10 руки или других групп мышц.
Поворотные усилия от рукоятки 28 передаются пружине 4 путем поворота оси 11 и жестко связанного с ней рычага 12, а от рукоятки 29 - через поводок 31, соединенный посредством штифта 32 с рукояткой 10.
В зависимости от диапазона измеряемых усилий устанавливают упор 17 рычага 12 напротив соответствуюшего контактного выступа (18, 19, 20) пружины 4, для чего
5
0
5
ослабляют стопорный винт 16, пере.мещают ползун 14 с прижимом 15 и упором 17 в требуемое положение в пазу 13 и закрепляют винт 16.
Измерение статической или динамической выносливости мышц выполняют при подключении электрического питания к регистратору. В результате взаимодействия свободного конца плоской пружины 4 с поводком 52 поворотной муфты 51 происходит поворот оси 50 резистора 49 на угол, величина которого пропорциональна величине измеряемого усилия и перемещению свободного конца пружины 4. В результате изменения сопротивления резистора 49 при повороте его оси изменяется сила тока, поступающего к регистратору, что фиксируется на непрерывно движущейся бумажной ленте. При прекращении воздействия на пружину 4 она возвращается в исходное положение (плоское), а резистор 49 поворачивается в исходное положение возвратной пружиной 53 через муфту 51.
Поворот стрелки 5 индикатора 7 при возрастании прилагаемого усилия к пружине 4 происходит в результате взаимодействия пружины с регулировочным винтом 21 сектора 8, а при уменьшении усилия или прекращении его действия - в результате воздействия пружины 4 на сектор 8 через возвратную пружину 27. Движение стрелки 5 при возрастании измеряемого усилия передается стрелке 6 через ее поводок 25. При уменьшении усилия или прекращении его действия стрелка 6 остается напротив деления шкалы, соответствующего наибольшему усилию, а возврат ее в исходное положение осупхествляют вручную ручкой 26.
Формула изобретения
0
5
1. Устройство для измерения силы и выносливости мышц, содержащее установленный на столе динамометр, в корпусе которого закреплена плоская пружина, кинематически связанный с ней механизм для приложения силы сжатия кисти руки, индикатор с поворотными стрелками и регистратор, отличающееся тем, что, с целью расширения функциональных возможностей, расширение диапазона и повышения точности измерения, оно снабжено механизмом для приложения растягивающего относительно 0 корпуса усилия, выполненны.м в виде рукоятки, которая шарнирно установлена на соединенном с корпусом посредством поворотной оси двуплечем рычаге, имеющем механиз.м для изменения диапазона измеряемых усилий, взаимодействующий с плоской пружиной динамометра, механизма.ми для приложения поворотных усилий от кистей рук, выполненными в виде в двух рукояток, имеющих головки для захвата пальцами и цилинд0
5
5
рические рифленые стержни для захвата кистью руки, причем одна рукоятка установлена на поворотной оси двуплечего рычага, а другая кинематически связана с осью рычага с возможностью ее поворота в противоположном направлении, механизм для приложения силы сжатия кисти руки выполнен в виде закрепленного на столе откидного упора, захватная часть которого установлена параллельно захватной части рукоятки для приложения растягивающих усилий с возможностью регулирования расстояния между ними, а плоская пружина жестко закреплена в корпусе динамометра одним концом с возможностью взаимодействия второго конца с механизмом для изменения диапазона измеряемых усилий; с поворотными стрелками индикатора и с регистратором.
2. Устройство по п. 1, отличающееся тем, что механизм для изменения диапазона измеряемых усилий выполнен в виде соединенных между собой стопорным винтом ползуна и прижима, установленных с возможностью
0
0
перемещения в продольном пазу двуплечего рычага динамометра, причем пол.зун снабжен упором, взаимодействующим с плоской пружиной через ее контактные выступы, уста новленные на различных расстояниях от точки ее закрепления в корпусе.
3.Устройство по п. 1, отличающееся тем, что, с целью обеспечения удобной позы пациента при изменении силы и выносливости различных групп мыщц, стол для закрепления динамометра выполнен с возможностью регулирования положения по высоте и углу наклона.
4.Устройство по п. 1, отличающееся тем, что, с целью повышения удобства в эксплуатации, в регистраторе самописец установлен отдельно от динамометра и электрически связан с поворотным переменным резистором, снабженным пружиной возврата на ноль и установленным в корпусе динамометра, причем на оси резистора закреплена поворотная муфта с поводком, взаимодействующим со свободным концом плоской пружины динамометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кистевой динамометр | 1990 |
|
SU1723465A1 |
| Тензометрический кистевой динамометр | 1988 |
|
SU1706651A1 |
| Устройство для шаговой подачи стопы заготовок | 1984 |
|
SU1194544A1 |
| Устройство для тренировки мышц | 1990 |
|
SU1789242A1 |
| Захват-кантователь | 1984 |
|
SU1299939A1 |
| Устройство для исследования функции кисти руки | 1990 |
|
SU1718812A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ УСИЛИЯ СЖАТИЯ КИСТИ | 2002 |
|
RU2218086C1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в ориентированном положении | 1987 |
|
SU1454550A1 |
| Устройство для измерений силы мышц и амплитуды движений руки человека | 1983 |
|
SU1175433A1 |
| Устройство для тренировки штангистов | 1988 |
|
SU1623670A1 |
Изобретение относится к медицинской технике, точнее к устройствам для измерения силы и выносливости различных мышц человека, предназначено для медицинской и спортивной практики. Цель изобретения - расширение функциональных возможностей, расширение диапазона и повышение точности измерений, удобство поз пациента при измерении силы и выносливости различных групп мышц и повышение удобства в эксплуатации. Аппарат содержит установленный на столе динамометр, в корпусе которого жестко закреплена одним концом плоская пружина, показывающий прибор с поворотными стрелками, устройство для приложения силы сжатия кисти человека, растягивающих относительно динамометра усилий и усилий поворота кистей рук. Устройство для приложения растягивающих усилий в виде рукоятки, щарнирно установленной на соединенном с корпусом динамометра посредством поворотной оси двуплечем рычаге, имеющем устройство для изменения диапазонов измеряемых усилий, в виде соединенных между собой стоПорны.м винтом ползуна и прижима, установленных с возможностью перемещения в продольном пазу двуплечего рычага. Цол- зун снабжен упором, взаимодействующим с плоской пружиной через ее контактные выступы, установленные на расчетных расстояниях от точки ее закрепления в корпусе динамометра. Устройство для приложения поворотных усилий от кистей рук в виде двух рукояток, имеющих головки для захвата пальцами руки и цилиндрические рифленые стержни для захвата сжатой в кулак кистью, одна рукоятка установлена на поворотной оси двуплечего рычага, а другая - кинематически связана с этой осью с возможностью ее поворота в направлении, противоположном повороту этой рукоятки. Устройство для приложения силы сжатия кисти руки в виде закрепленного на столе от- ки/,ного упора, захватная часть которого параллельна захватной части рукоятки для приложения растягивающих усилий на расстоянии, удобном для захвата кистью, с возможностью регулировки этого расстояния. Стол для закрепления динамометра выполнен с воз.можностью регулировки положения по высоте и углу наклона. В записывающем устройстве са.мописец установлен отдельно от динамометра и электрически связан с поворотным переменным резистором, снабженным пружиной возврата на ноль и установленным в корпусе динамометра, причем на оси резистора закреплена поворотная муфта с поводко.м, взаи.модействую- щим со свободным концом плоской пружины динамометра. 3 з.п. ф-лы, 5 ил. G SS (Л 4 Ю 05 СЛ 
28 1 23
36
фиг. 2 Видб
в-в
Фс/г. 4Г - Г
38
liG
Г
J5
32
| ДИНАМОМЕТР ДЛЯ ОПРЕДЕЛЕНИЯ СИЛЫ СЖАТИЯ КИСТИРУКИ | 0 |
|
SU179040A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
