J0.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1983 |
|
SU1125082A1 |
| Устройство для отделения плоской заготовки от стопы и подачи ее к обрабатывающей машине | 1983 |
|
SU1098623A1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1981 |
|
SU946744A1 |
| Устройство для отделения листовых заготовок от стопы | 1980 |
|
SU978987A1 |
| Способ отделения верхнего листа от стопы и подачи его в зону обработки и устройство для его осуществления | 1986 |
|
SU1375388A1 |
| Устройство для определения листовых заготовок от стопы и подачи их в пресс | 1984 |
|
SU1183254A1 |
| Устройство для отделения листовых заготовок от стопы и подачи их в зону обработки | 1982 |
|
SU1069909A1 |
| Устройство для отделения листа от стопы | 1986 |
|
SU1524958A1 |
| Устройство для отделения листовых заготовок от стопы и подачи их в пресс | 1982 |
|
SU1013044A1 |
Изобретение относится к обработке давлением, в частности к средствам механизации и автоматизации листоштамповочного производства, и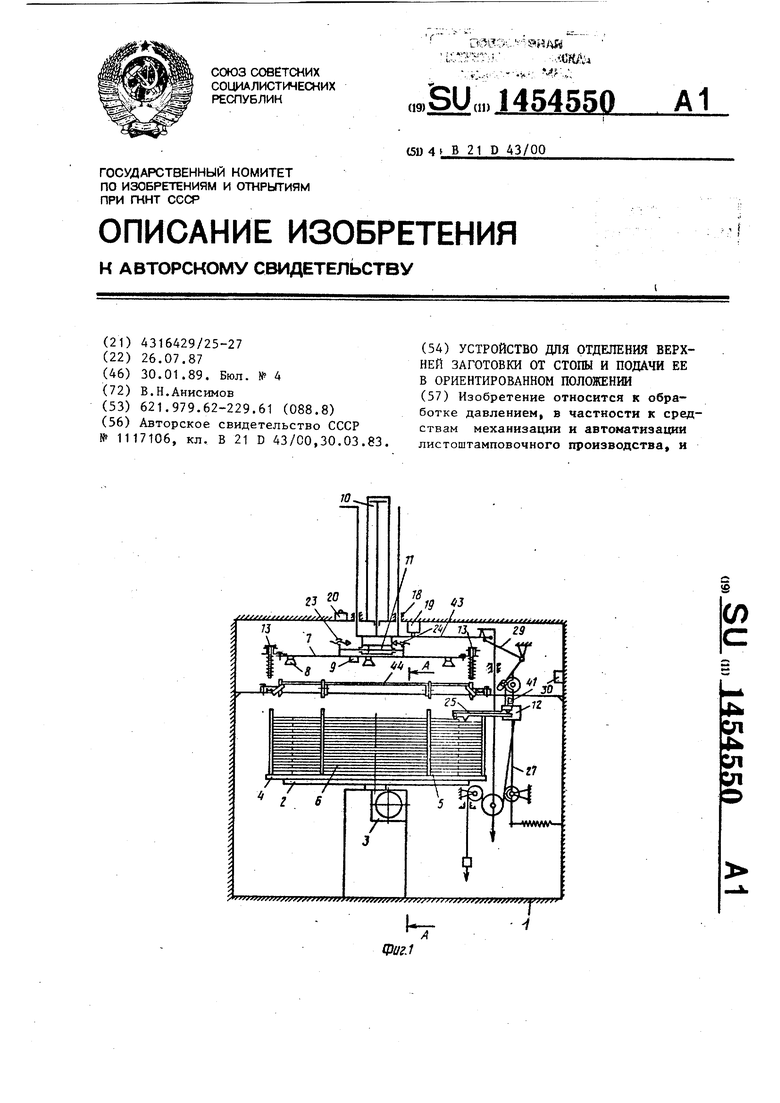
гз 20
XXywXXX./XXA/v W XvAvj Pi
rs
19 «J
&
(Л
ел 4 :п :л
м.б. использовано для отделения листовой заготовки от стопы и подачи ее в ориентированном положении под захват манипухштора. Цель - расширение технологических возможностей путем i обеспечения надежного отделения и подачи в ориентированном положении заготовок разных типоразмеров из различных материалов. Устройство содержит- подвижную в вертикальном и горизонтальном направлениях травер.су 7 с захватными органами 8, поворотный стол 2 со стопой 6 заготовок и узел контроля 12 сдвига заготовок. Этот узел состоит из датчика 25, стержня 27, закрепленного шарнирно на станине. В прорези стержня размещен
1
Изобретение относится к обработке металлов давлением, в частности к средствам механизации и автоматизации листоштамповочного производства, и может быть использовано для отделения листоцрй заготовки от стопы и подачи ее в ориентированном положении под руку манипулятора.
Целью изобретения является расширение технологических возможностей устройства путем обеспечения надежного отделения и подачи в ориентированном положении листовых заготовок различных типоразмеров.
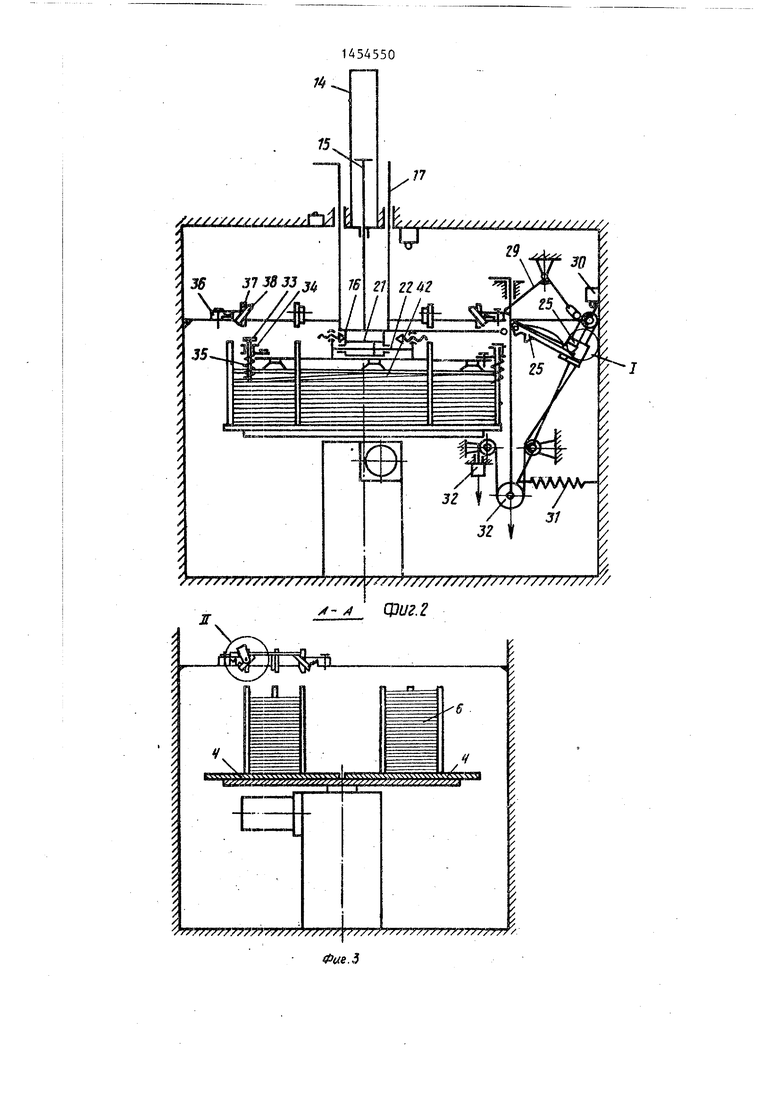
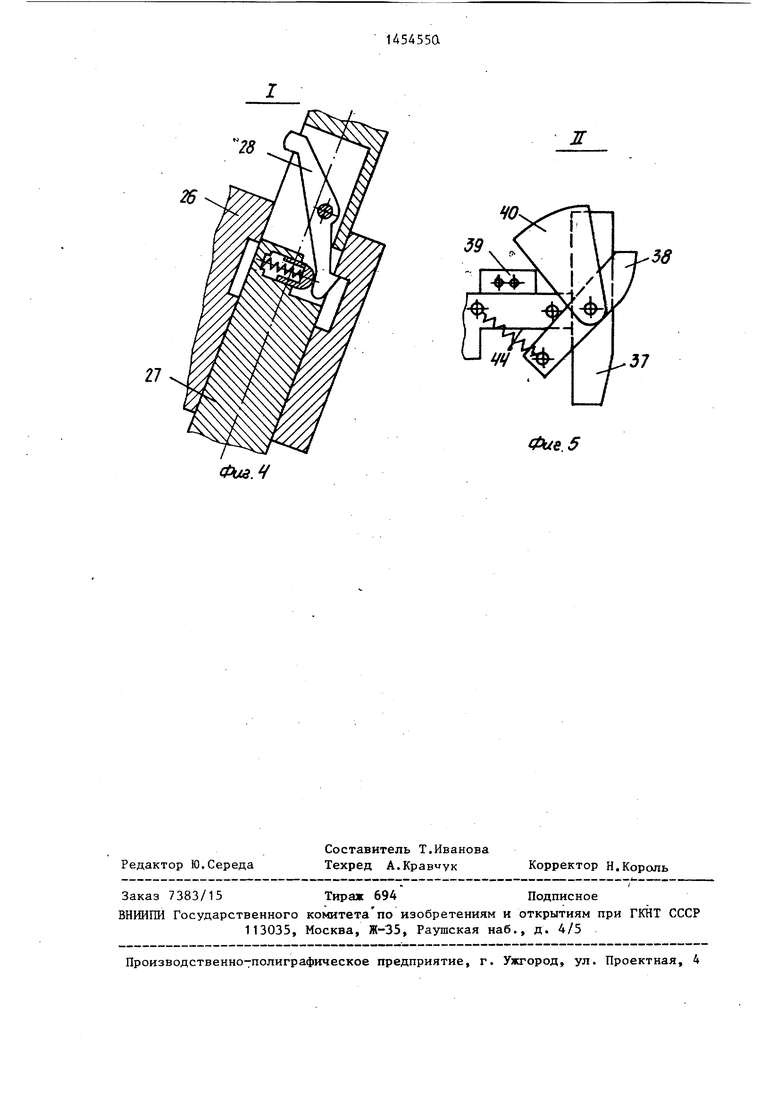
На фиг„1 схематично изображено предлагаегмое устройство в исходном положенииi на фиг.2 - то же, в момент отделения заготовки; на фиг.З - разрез А-А на фиг.1; на фиг.4 - узел I на фиг.2; на фиг.5 - узел II на фиг.3.
Устройство содержит смонтированный на станине 1 поворотный стол 2 с приводом 3 поворота установленные на поворотном столе кассеты 4 с размещенными в них между направляюпщми стойками 5 стопами 6 листовых заготовок, траверсу 7 с з;1хватными органами 8 и оптоэлектронным датчиком захвата заготовки, привод вертикального перемещения траверсы 10, привод горизонтального перемещения трана оси подпружиненный рычажный фиксатор, смонтированный с возможностью взаимодействия с неподвижным упором и с возможностью выхода его выступа из ползуна только в вертикальном положении стержня 27. Нижний конец стержня подпружинен, а верхний связан кинематически с приводом 10 вертикального перемещения траверсы и электромеханическим фиксатором 30. Ползун посредством гибкого троса соединен с узлом натяжения, кинематически связанным с приводом 10. Устройство позволяет исключить необходимость проверки наличия сдвоенных заготовок при их захвате рукой робота. 3 з.п. ф-лы, 5 ил.
версы 11, узел контроля сдвига заготовок в стопе 12 и размещенные на. траверсе по обе стороны от захватных органов отсекатели 13. 5 Привод вертикального перемещения
траверсы 10 состоит из неподвижно установленного на станине 1 пневмо- цилиндра 14 двойного действия с од носторонним штоком 15, подвижной ка- 0 ретки 16, жестко соединенной со штоком и двумя направляющими 17, установленными в направляющих втулках 18 станины с возможностью перемещения в
вертикальной плоскости вместе с ка- 5 „ реткои.
Привод вертикального перемещения траверсы 10 снабжен датчиками крайнего верхнего 19 и нижнего 20 положений подвижной каретки 16. В подвиж ной каретке 16 смонтирован привод горизонтального перемещения траверсы 11, выполненньй в виде пневмоцилинд- ра 21 двойного действия с двухсторонним штоком 22, жестко соединенным с траверсой 7. На траверсе 7 установлены два регулируемых упора 23 и 24, с помощью которых регулируется перемещение траверсы в направлении сдвига заготовок в стопе.
Узел контроля сдвига заготовок 12 состоит из датчика 25, например контактного, размещенного на ползу5
не 26, стержня 27, закрепленного шарнирно на станине с возможностью качательного движения в вертикальной плоскости, установленного в прорези стержня на оси подпружиненного фиксатора 28, двуплечего рычага 29, установленного шарнирно на ст-анине и соединенного со стержнем, электромеханического фиксатора 30, пружины 31 растяжения и механизма 32 натяжения.
Отсекатели 13 выполнены в виде пластин 33, установленных в корпусах ЗА траверсы с возможностью перемещения в них вертикально вниз под действием пружин 35. Положение корпусов 34 с пластинами 33 регулируется в горизонтальной плоскости перемещения вдоль траверсы в зависимости от размеров заготовок и в вертикальной плоскости - в зависимости от усилия, необходимого для отделения верхней заготовки.
Над кассетами на брусьях станины 1 установлены с возможностью изменения их положения в горизонтальной плоскости кронштейны 36, в которых смонтированы ориентирующие направляющие 37 и подпружиненные поворачивающиеся упоры 38. У ориентирующих направляющих 37 со стороны, обращенной к стопе, выполнены скосы. На одном из кронштейнов 36 помещен датчик 39, например оптоэлектронный. На одной оси с поворачивающимся упором 38 установлен флажок 40, взаимодействующий с датчиком 3.
На станине 1 установлен неподвижный упор 41, взаимодействующий с подпружиненным фиксатором 38 узла контроля сдвига заготовок в стопе 12. Ползун 26 узла контроля сдвига заготовок в стопе 12 с помощью механизма 32 натяжения кинематически связан со штангой 43 привода вертикального перемещения траверсы 7. Поверхности подпружиненных поворачиван щихся упоров, контактирующие с кромками заготовок, вьшолнены гладкими, без зубьев, а опорные поверхности упоров, на которые ложится отделенная заготовка 44, расположены в одной плоскости.
Устройство работает следующим образом.
Перед началом работы в кассеты 4 укладывают листовые заготовки в сто10
15
20
j ,
, -
нз-25
Д54550
пу 6 со сдвигом относительно друг друга н противоположные стороны по длинной стороне заготовки.
Величина сдвига выбирается в пределах 15-30 мм в зависимости от размеров заготовки, для этого направляющие стойки 5 кассет А в направлении сдвига устанавливают с расстоянием между их внутренними поверхностями, равным длине заготовки плюс величина сдвига. Заготовки укладывают, сдвигая попеременно до упора то в одну направляющую стойку, то в другую. Отсекатели 13 на траверсе 7 устанавливают симметрично вертикальной оси траверсы с расстоянием между внутренними поверхностями пластин 33, равным длине заготовки плюс 1/2 - 3/4 величины сдвига. Кронштейны 36 с ориентирующими направляющими 37 и подпружиненными поворачивающимися упорами 38 устанавливают симметрично оси привода вертикального перемещения траверсы точно по размерам обрабатываемой заготовки.
Регулируемые упоры 23 и 24 на траверсе устанавливают в такое положение, чтобы перемещение траверсы в плоскости, параллельной плоскости стопы, было чуть более 1/2 величины сдвига заготовок в стопе (на 1-2 мм) в каждую сторону относительно оси
привода вертикального перемещения. i
В исходном положении -устройства
траверса 7 с захватными органами 8 и отсекателями 13 находится в крайнем верхнем положении, что фиксируется датчиком 19. Кассеты А со стопами заготовок 6 установлены на поворотном столе 2. Стержень 27 с ползуном 26 и датчиком 25 узла контроля сдвига наклонен в сторону от стопы заготовок и зафиксирован электромеханическим фиксатором 30. В таком положении узла контроля сдвига заготовок поворотный стол с кассетами может поворачиваться вокруг вертикальной оси при смене кассет.
После включения устройства в ав- томатический режим работы по команде системы управления сначала узел контроля сдвига заготовок проверяет в как-то сторону стопы сдвинута верхняя заготовка. Для этого электромеханический фиксатор 30 освобождает стержень 27 от фиксации и под дейст30
35
40
45
50
55
5 1 вием пружины 31 стержень поворачивается в сторону стопы заготовок до Вертикального положения,, что обеспечивается поворотом стержня 27 до упора в неподвижный упор 41.
Как только подпружиненный фиксатор 28 достигнет неподвижного упора :41, он утапливается и освобождает ползун 26 от фиксации на стержне, ползун под тяжестью собственного веса перемещается вместе с датчиком 25 к верхней плоскости стопы заготов ок.
В случае, если выступающий конец
последующей заготовки 42 в стопе
I
I находится со стороны узла контроля
I сдвига заготовок (фиг.1), контакт датчика 25 останется разомкнутым и привод перемещения траверсы в плоскости, параллельной плоскости стопы, переместит траверсу в сторону от узла контроля сдвига заготовок до упора в подвижную каретку 16 регу- |лируемого упора 24,
I В случае, если в стопе со стороны ;узла контроля сдвига заготовок от- I сутствует выступающий конец послед тта I щей заготовки, контакт датчика 25 замкнется и привод перемещения траверсы в плоскости, параллельной I плоскости стопы переместит ее в сто I рону узла контроля сдвига заготовок I до упора в. подвижную каретку 16 регу i лируемого упора 23.
Одновременно с перемещением траверсы 7 в плоскости, параллельной плоскости стопы в направлении сдвига заготовок в стопец траверса перемещается вертикально вниз, при этом штанга 43 привода вертикального перемещения траверсы взаимодействует с механизмом 32 натяжения и с двуплечим рычагом 29, в результате чего ползун 26 с датчиком 25 под действие силы натяжения поднимаются вверх по стержню 27, и одновременно с этим с помощью двуплечего рычага 29 стержен поворачивается в сторону от стопы,
Еще до достижения захватными органами 8 и отсекателями 13 верхнего уровня стопы стержень 27 фиксируется электромеханическими фиксатором 30 в положении, когда стержень отклоне от стопыS а ползун с датчиком 25 фиксируется на стержне подпружиненн фиксатором 28.Двигаясь вниз вместе с траверсой один из отсекателей 13, напротив которого в это время оказался выступа
0
20
25
А550
45
50 55
30
щий конец последующей заготовки, своей пластиной 33 достигает поверхности стопы заготовок раньше, чем захватные органы, и прижимает выступающий конец последующей заготовки к стопе.
После достижения захватными органами 8 поверхности верхней заготовки 44 захватные органы захватывают верхнюю заготовку, срабатывает датчик 9 захвата заготовки,и траверса с захваченной заготовкой начинает подниматься вверх, при этом подпру- 15 жиненная пластина 33 отсекателя продолжает удерживать последующею заготовку, прижимая ее выступающей конец к стопе до отделения верхней заготовки.
Усилие, с которым отсекатели прижимают последующую заготовку к стопе, несколько больше силы сцелления листовых заготовок. Величина усилия регулируется перемещением отсекателей в вертикальной плоскости.
Как только закончится отделение верхней заготовки, траверса вместе с отделенной заготовкой по команде системы управления перемещается приводом перемещения траверсы в плоскости, параллельной плоскости стопы в направлении от упора 24 до упора 23 или наоборот в зависимости от того, в какую сторону была сдвинута верхняя заготовка в стопе, ориентируя отделенную заготовку симметрично оси привода .вертикального перемещения траверсы.
Вслед за этим еще до достижения отделенной заготовкой ориентирующих направляющих 37, обе полости пнев- моцилиндра 21 соединяются с атмосферой.
Достигнув ориентирующих направляющих 37, отделенная заготовка своими наружными кромками скользит по скосам и вертикальным поверхностям ориентирующих направляющих и ориентируется симметрично оси привода вертикального перемещения траверсы.
Достигнув подпружиненных поворачивающихся упоров 38, загото)зка скользит по гладким поверхностям подпружиненных поворачивающи:сся упоров и поворачивает их.
Одновременно с этим флажок 40 поворачивается и взаимодейст1зует с оптоэлектронным датчиком 39. В результате этого взаимодействия датчик 39 дает команду на захватные органы
35
40
7
8 и они отпускают заготовку после прохождения заготовкой поворачивающихся упоров и она опускается на опорные плоскости этих упоров. Штан- га 43 привода вертикального перемещения траверсы, .,продолжая двигаться вместе с траверсой вверх, взаимодействует с механизмом 32 натяжения и освобождает ползун 26 от действия силы натяжения.
После достижения траверсой крайнего верхнего положения, что фиксируется датчиком 19, заготовка захватывается рукой манипулятора (не показано) и цикл повторяется. Когда из рабочей кассеты будут взяты все заготовки, поворотный стол 2 повернется и следующая кассета со стопой заготовок установится под траверсой 7.
Возможность перемещения траверсы в горизонтальной плоскости на расстояние чуть больше 1/2 величины сдвига заготовок в стопе обеспечивает прижим отсекателями к стопе тольк попеременно выступающего конца последующей заготовки, что обеспечивает надежное отделение верхней заготовки при минимальных энергозатратах.
Формула изобретения
14
25 с возможностью взаимодействия с неподвижным упором, электромеханического фиксатора и гибкого троса с узлом натяжения, кинематически связанного с приводом вертикального перемещения траверсы, при этом нижний ко нец стержня подпружинен, а верхний посредством двуплечего рычага кинематически связан с приводом вертикального перемещения траверсы и элек
щее смонтированный на станине поворотный стол для размещения кассет с заготовками, привод поворота стола.
что подпружиненные упоры вместе с вертикальными направляющими, ориентирующими
acll U i иоЛЛГШ , Aii/no., -fc-.
траверсу с захватными органами, при- 40 отделяемую заготовку, смонтированы
вод вертикального перемещения траверсы и подпружиненные упоры, о т- личающееся тем, что, с целью расширения технологических возможностей путем обеспечения надежного отделения и подачи в ориентированном положении заготовок различных типоразмеров, устройство снабжено приводом горизонтального
на кронштейнах, установленных на станине над кассетами с возможностью регулировочного перемещения в горизонтальной плоскости, причем поверх- 45 ности упоров выполнены гладкими.
..г..„. снабжена регулируемыми упорами, огперемещения траверсы и подвижной ка- 50 раничивающими ее перемещение в го- реткой, установленной в станине над ризонтальном направлении.
10
о
54550
стопой заготовок, узлом контроля сдвига заготовок в стопе, связанным кинематически и электрически с приводами вертикального и горизонталь- ного перемещения траверсы, отсекателями, выполненными в виде вертикально подпружиненных пластин, установленных в корпусах с возможностью регулировочного перемещения вдоль траверсы и в вертикальной плоскости и смонтированными на траверсе по обе стороны от захватных органов. 2. Устройство по П.1, о т л и 15 чающееся тем, что узел контроля сдвига заготовок в стопе выполнен в виде стержня с прорезями, шарнирно закрепленного на станине, датчика, например контактного, смон20 тированного на ползуне с возможностью совместного с ним перемещения вдоль стержня, подпружиненного рычажного фиксатора, один конец которого размещен в прорези стержня, а другой 25 с возможностью взаимодействия с неподвижным упором, электромеханического фиксатора и гибкого троса с узлом натяжения, кинематически связанного с приводом вертикального перемещения траверсы, при этом нижний конец стержня подпружинен, а верхний посредством двуплечего рычага кинематически связан с приводом вертикального перемещения траверсы и элек30
35 тромеханическим фиксатором, 3. Устройство по п.1, о т л и тромеханическим фиксатором, 3. Устройство по п.1, о т л и чающееся тем.
что подпружиненные упоры вместе с вертикальными направляющими, ориентирующими
отделяемую заготовку, смонтированы
на кронштейнах, установленных на станине над кассетами с возможностью регулировочного перемещения в горизонтальной плоскости, причем поверх- ности упоров выполнены гладкими.
74
//- /i
фиг. 2
26
11
Фаз. Ч
59
57
Фие.5
| Устройство для отделения листовой заготовки от стопы и подачи ее к прессу | 1983 |
|
SU1117106A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
