Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов, и может быть использовано при проведении погрузочно-разгрузочных работ с объектами, имеющими наружные выступы или торцовые отверстия.
Цель изобретения - повышение удобства в эксплуатации.
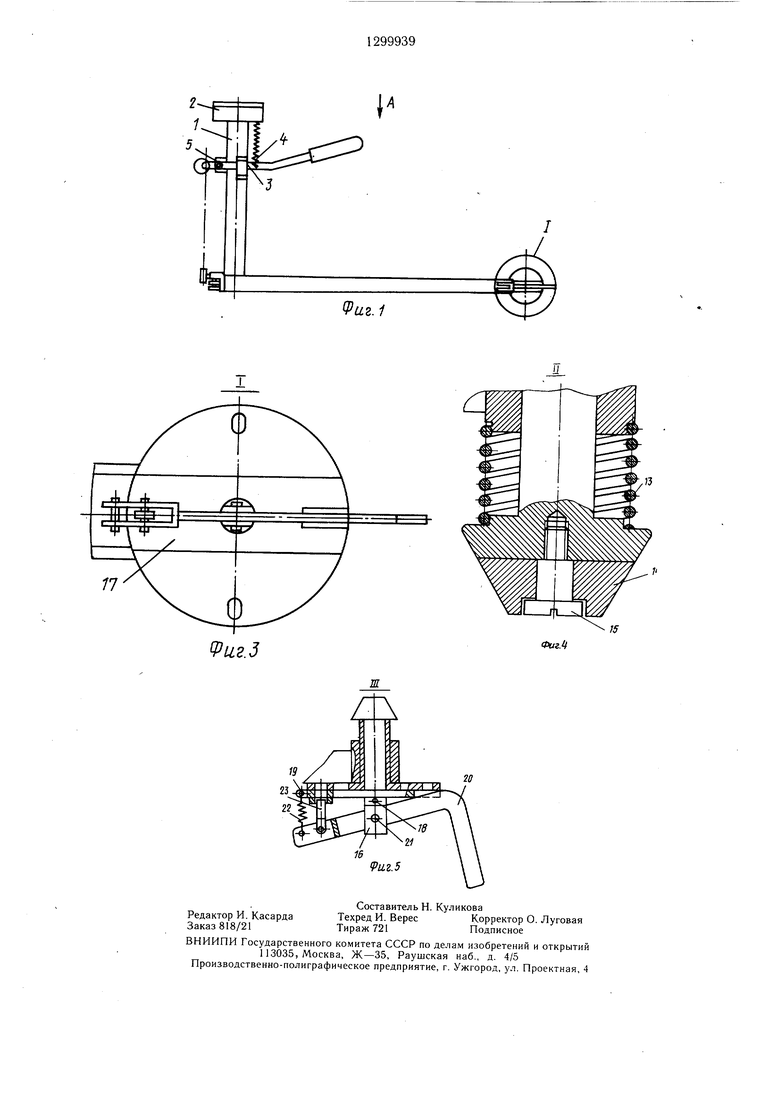
На фиг. 1 изображен захват-кантователь, вид сбоку; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел 1 на фиг. 1; на фиг. 4 - узел II на фиг. 2; на фиг. 5 - узел III на фиг. 2.
Захват-кантователь содержит раму 1 с хвостовиком 2. На раме 1 размешен механизм управления, состояший из двуплечего рычага 3, подпружиненного пружиной 4, имеюшего ось 5 враш.ения, двух роликов 6 и 7, троса 8 и двуплечего рычага 9 с осью 10 врашения. Двуплечий рычаг 9 соединен через ось 11 с упором 12, выполненным с возможностью утопания в раме 1. Упор 12 под- пружинен-пружиной 13 и имеет врашаюшую- ся головку 14, закрепленную на упоре винтом 15. Второй упор 16 выполнен с возможностью врашения в раме 1. На хвостовой части упора 16 смонтированы поворотная планка 17 с прорезью и овальным отверстием, крепяшаяся к упору 16 штифтом 18 и снабженная кронштейном 19, двуплечий рычаг 20, соединенный с упором 16 осью 21. На коротком плече рычага 20 закреплены пружина 22, второй конец которой крепится к кронштейну 19 планки 17, и фиксатор 23.
Захват-кантователь работает следуюшим образом.
Хвостовиком 2 рамы 1 захват закрепляется на манипуляторе и рукояткой управления манипулятора подводится к лежашей горизонтальной детали. Рукой оператора конец длинного плеча рычага 3 опускается. При этом пружина 4 растягивается. Усилие оператора от короткого плеча рычага 3 с помощью роликов 6 и 7 через трос 8 передается на длинное плечо двуплечего рычага 9. Последний, врашаясь вокруг оси 10, вторым плечом тянет закрепленный на оси 11 упор 12 который утопает в раме 1, сжимая пружину 13. Расстояние между концами упоров 12 и 16 становится достаточным для захвата детали.
Далее захват опускается на деталь так, чтобы ось симметрии захватываемой детали совпадала с осью симметрии упоров 12 и 16. Снимается усилие оператора с рычага 3. При этом под воздействием пружины 4 ры
чаг 3 возвращается в исходное положение. Под воздействием пружины 13 возвращается в исходное положение упор 12 - деталь зажата и готова к транспортировке захватом.
Для кантования захваченной детали (поворот вокруг оси на 90°) оператору необходимо рукой нажать на длинное плечо двуплечего рычага 20 так, чтобы его кромка вошла в прорезь поворотной планки 17. При этом пружина 22 растягивается, а фиксатор 23 выходит из отверстия в планке 17 и совпадающего с ним отверстия в раме 1. Далее необходимо повернуть двуплечий рычаг 20 на 90° по часовой стрелке. Одновременно поворачиваются на 90° связанный с двуплечим рычагом 20 через ось 21 упор 1.6, поворотная планка 17 (последнюю двуплечий рычаг 20 поворачивает, воздействуя кромкой длинного плеча, вошедшего в прорезь), врашаюшаяся головка 14 упора 16 и соответств енно лежащая на упоре 16 и головке 14 захваченная деталь.
После поворота на 90° необходимо отпустить двуплечий рычаг 20. При этом под воздействием пружины 22, рычаг 20 принимает исходное положение, а фиксатор 23 входит в отверстие на планке 17 и в совпавшее отверстие в раме 1. Деталь зафиксирована.
Для освобождения детали из захвата достаточно усилием оператора опустить длинное плечо рычага 3 в крайнее нижнее положение.
Формула изобретения
Захват-кантователь, содержащий несущую раму, размещенные на раме захватные органы, один из которых установлен с возможностью поворота относительно горизонтальной оси и имеет фиксатор его положения отличающийся тем, что, с целью повышения удобства в эксплуатации, он снабжен управляющими рычагами, два из которых щарнир- но связаны с рамой и кинематически связаны между собой, а третий подпружинен относительно рамы и шарнирно связан с первым захватным органом, фиксатор положения которого представляет собой шарнирно прикрепленный к третьему рычагу палец, при этом один из первых рычагов шарнирно соединен с вторым захватным органом, установленным с возможностью продольного перемещения и выполненным с поворотной относительно горизонтальной оси головкой.
(Pu.z.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для кантования обрабатываемых деталей на конвейере | 1987 |
|
SU1537623A1 |
| Захват-кантователь | 1987 |
|
SU1472411A1 |
| Автоматизированный участок механической обработки изделий с центральным отверстием | 1983 |
|
SU1073077A1 |
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
| Загрузочное устройство | 1987 |
|
SU1442368A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Устройство для загрузки металлорежущего станка | 1986 |
|
SU1360967A1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| Захват-кантователь | 1983 |
|
SU1137056A1 |
| Кантователь | 1973 |
|
SU562474A1 |
Изобретение относится к подъемно- транспортному машиностроению, в частности к захватам-кантователям. Целью изобретения является повышение удобства в эксплуатации. Захват-кантователь содержит раму. На раме размещены рычаг 3 управления и двуплечие рычаги 9 и 20. К двуплечим рычагам 9 и 20 посредством осей с возможностью продольного перемещения прикреплены упоры 12 и 16. При захвате детали усилие передается на двуплечий рычаг 9, который, врашаясь, тянет упор 12. Деталь вводится в образованный проем. При снятии усилия с двуплечего рычага 9 упор 12 возвращается в исходное положение, зажимая деталь. Для кантования двуплечий рычаг 20 поворачивают на 90° по часовой стрелке. Одновременно поворачиваются упор 16 и деталь. 5 ил. ВидА сл to ;о со со со :о 20 фиг. 2 76
77
VU2.3
ФигМ
го
9и.г.5
Составитель Н. Куликова
Редактор И. КасардаТехред И. ВересКорректор О. Луговая
Заказ 818/21Тираж 721Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
