(21)4204034/31-08
(22)03.03.87
(46) 30.09.88. Бюл.№ 36
(71)Московский станкоинструменталь ный институт
(72)В.В.Верховский, В.В.Новиков, Е.П.Солдаткин и А.А.Уваров
(53)621.229. 72(088.8)
(56)Авторское свидетельство СССР 897499, кл. В 25 J 17/00, 1980.
(54)МАНИПУЛЯТОР
(57)Изобретение, относится к машиностроению и может быть использовано в манипуляторах уравновешивания робото- технических устройств. Целью изобре тения является повышение надежности работы путем автоматического уравновешивания подвижного звена с одновременным увеличением срока службы гибг
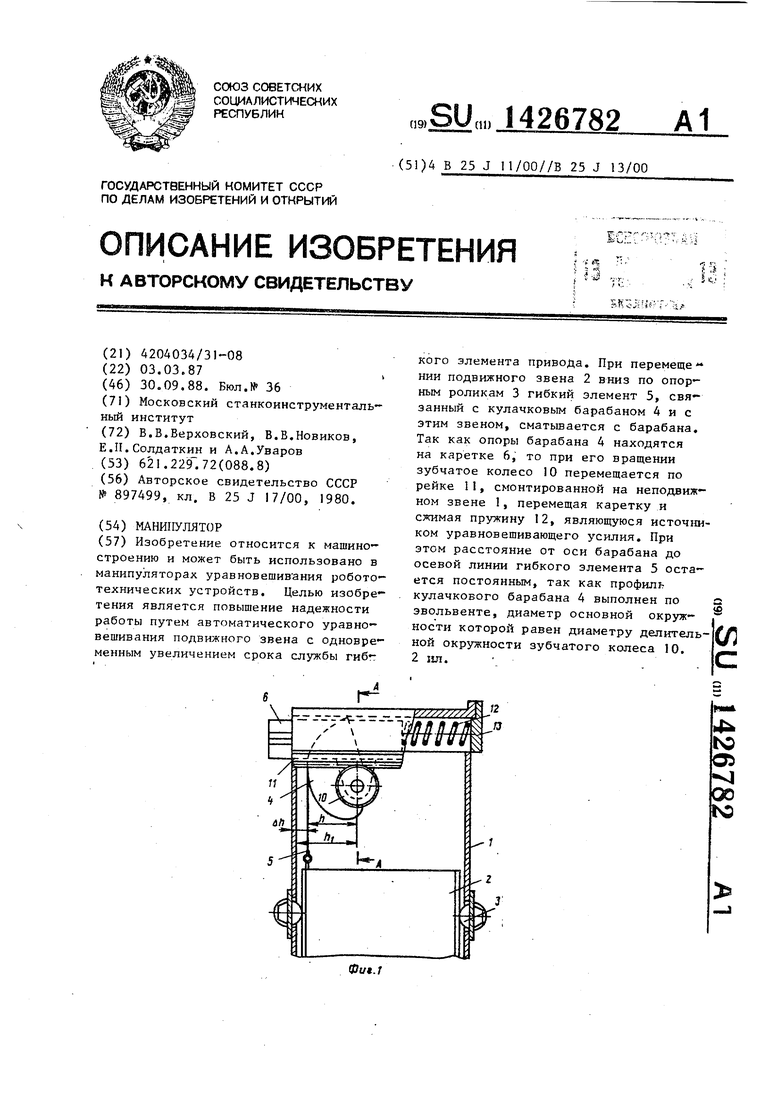
кого элемента привода. При перемещении подвижного звена 2 вниз по опорным роликам 3 гибкий элемент 5, связанный с кулачковым барабаном 4 и с этим звеном, сматьшается с барабана. Так как опоры барабана 4 находятся на каретке 6, то при его вращении зубчатое колесо 10 перемещается по рейке 11, смонтированной на неподвижном звене 1, перемещая каретку и сжимая пружину 12, являющуюся источником уравновещивающего усилия. При этом расстояние от оси барабана до осевой линии гибкого элемента 5 остается постоянным, так как профиль кулачкового барабана 4 выполнен по эвольвенте, диаметр основной окружности которой равен диаметру делительной окружности зубчатого колеса 10. 2 1ш.
о
W
С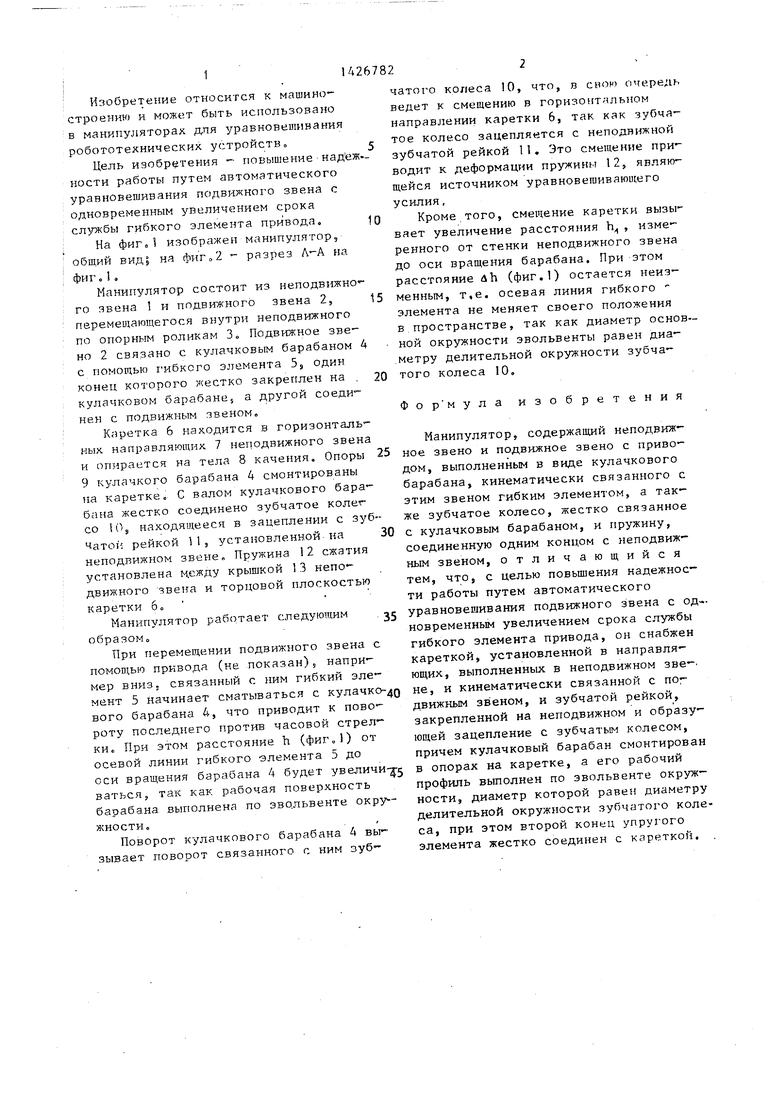
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| Уравновешенный манипулятор | 1987 |
|
SU1491698A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| ПРИВОД СКВАЖИННОГО НАСОСА | 2007 |
|
RU2353807C2 |
| ВАРИАТОР | 1990 |
|
RU2010140C1 |
| Чертежный прибор | 1990 |
|
SU1722891A1 |
| УСТРОЙСТВО ДЛЯ НАРЕЗАНИЯ ВИНТОВЫХ ПОВЕРХНОСТЕЙ ПЕРЕМЕННОГО ШАГА И ПОСТОЯННОЙ ГЛУБИНЫ | 1998 |
|
RU2144447C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| Способ изготовления конических зубчатых колес с зубцами эвольвентного очертания в продольном направлении | 1939 |
|
SU59129A1 |
| Механизм преобразования возвратно-поступательного движения в непрерывное вращательное | 2016 |
|
RU2629584C2 |
)11
; Изобретение относится к машиностроению и может быть использовано в манипуляторах д.пя уравновешивания робототехнических устройств. Цель изобретения - повышение над е ности работы путем автоматического уравновешивания подвижного звена с одновременным увеличением срока службы гибкого элемента привода,
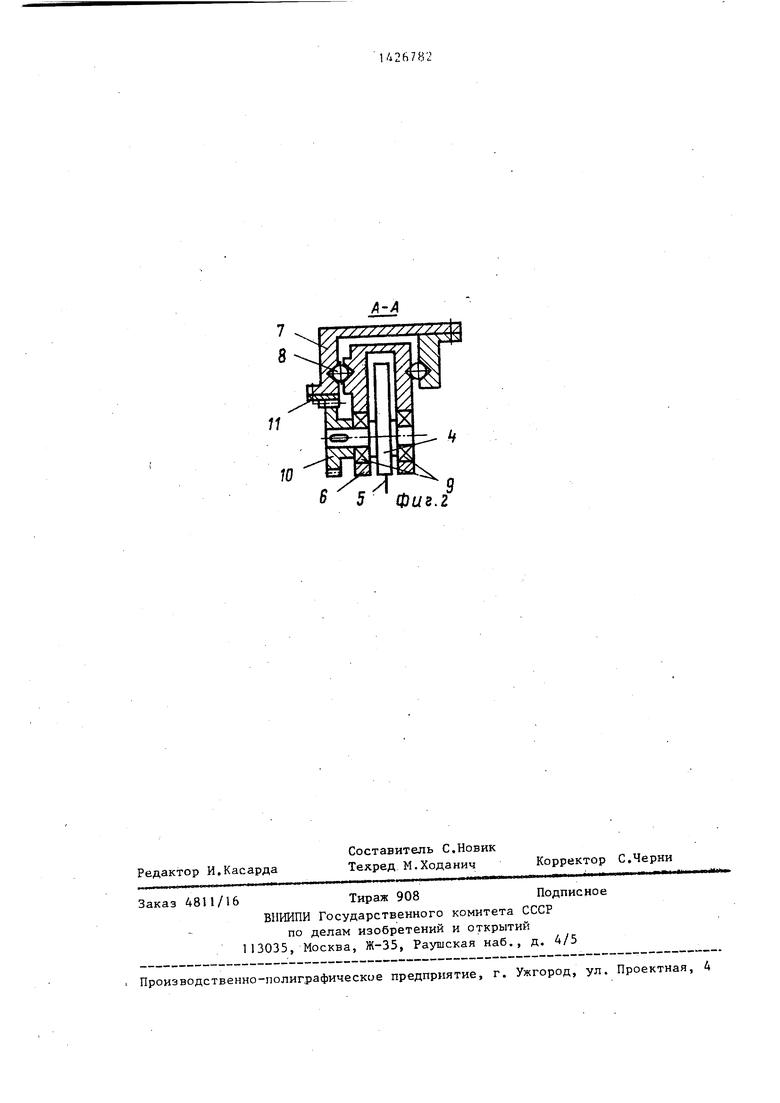
На фиг„1 изображен манипулятор, общий вид на фиг„2 - разрез Л-А на фиг о 1.
Манипулятор состоит из неподвижно го звена 1 и подвижного звена 2, перемещающегося внутри неподвижного по опорным роликам 3, Подвижное звено 2 связано с кулачковым барабаном с помощью гибкого элемента 5, один конец которого жестко закреплен на , кулачковом барабане, а д,ругой соединен с подвижным звеном.
Каретка 6 находится в горизонталь ных направляющих 7 негюдвижного звен и опирается на тела 8 качения. Опоры 9 кулачкого барабана 4 смонтированы на каретке, С валом кулачкового барабана жестко соединено зубчатое колег- со lOj находящееся в зацеплении с зу
4aToii рейкой 11, установленной на 30 неподвижном звене Пружина 12 сжатия установлена нежду крышкой 13 неподвижного эвена и торцовой плоскостью каретки 6о
Манипулятор работает следующим , jj образом
При перемещении подвижного звена с помоп1,ью привода (не показан), например вниз, связанный с ним гибкий элемент 5 начинает сматываться с кулачко-дд вого барабана Д., что приводит к повороту последнего против часовой стрел- ки. При этом расстояние h (фиг,) от осевой линии гибкого элемента 5 до оси вращения барабана 4 будет увеличи-д- ваться, так как рабочая поверхность барабана выполнена по эво.львенте окру ЖНОСТИо
Поворот кулачкового барабана 4 вы- зывает поворот связанного с ним зубчатого колеса 10, что, в спою оче.редь ведет к смещению в горизонтальном направлении каретки 6, так как зубчатое колесо зацепляется с неподвижной зубчатой рейкой П. Это смещение приводит к деформации пружинь 12, являющейся источником уравновешивающего усилия,
Кроме того, смещение каретки вызывает увеличение расстояния h , измеренного от стенки неподвижного звена до оси вращения барабана. При зтом расстояние dh (фиг.1) остается неизменным, т.е. осевая линия гибкого элемента не меняет своего положения в.пространстве, так как диаметр основной окружности эвольвенты равен диаметру делительной окружности зубчатого колеса 10,
Ф о р м ула изобретения
Манипулятор, содержащий неподвижное звено и подвижное звено с приводом, выполненным в виде кулачкового барабана, кинематически связанного с этим звеном гибким элементом, а также зубчатое колесо, жестко связанное с кулачковым барабаном, и пружину, соединенную одним концом с неподвиж- ньм звеном, отлич ающийся тем, что, с целью повьш ения надежности работы путем автоматического уравновещивания подвижного звена с од новременным увеличением срока службы гибкого элемента пр-ивода, он снабжен кареткой, установленной в направляющих, выполненных в неподвижном зне- не, и кинематически связанной с пог движным звеном, и зубчатой рейкой, закрепленной на неподвижном и образующей зацепление с зубчатым колесом, причем кулачковый барабан смонтирован в опорах на каретке, а его рабочий профиль выполнен по эвольвенте окружности, диаметр которой равен диаметру делительной окружности зубчатого колеса, при этом второй конец упругого элемента жестко соединен с кареткой.
10
5 Фиг.г
