Изобретение относится к механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании машин, станков, прессов и устройств различного назначения. Такие манипуляционные механизмы, имитирующие определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами в линиях высокой производительности.
Известно также устройство типа «рука» для передачи изделий, выполненное в виде комбинированного механизма, содержащего передаточный механизм с ведущим и выходным звеньями, исполнительный механизм с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод, в котором выходное звено передаточного механизма сопряжено с ведущим звеном исполнительного механизма, при этом сопряжение выполнено в виде зубчатого зацепления (патент №2224638 РФ, опубл. в БИПМ, 2004. - №6 - прототип). Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основной недостаток прототипа заключается в том, что длина ходов ведущего звена исполнительного механизма ограничена, что снижает технологические возможности устройства. Лимитирование технологических возможностей связано с тем, что всякое увеличение ходов возможно лишь при увеличении размеров ведущего кулачка, длины коромысла и рабочей дуги зубчатого сектора.
Задачей настоящего изобретения является расширение технологических возможностей использования манипулятора.
Решение поставленной задачи достигается тем, что в манипуляторе для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном в виде поворотного стержня с зубчатым сектором, исполнительного механизма с ведущим звеном в виде толкателя с зубчатой рейкой и выходными звеньями с губками для захвата изделий, в котором зубчатый сектор и зубчатая рейка кинематически связаны, и привод, кинематическая связь сектора и рейки снабжена дополнительными элементами зубчатого зацепления в виде системы зубчатых колес для сопряжения с зубчатым сектором и зубчатой рейкой.
Система зубчатых колес включает малое и большое зубчатые колеса, жестко и соосно связанные между собой, при этом малое колесо сопряжено с зубчатым сектором, а большое - с зубчатой рейкой.
Передаточный механизм выполнен в виде многозвенного рычажно-зубчатого механизма, который включает кинематически связанные звенья: кривошип, ползун, выходное звено с зубчатым сектором, систему зубчатых колес, при этом механизм соответствует первому условию работоспособности - формуле Чебышева
W=3·n-2p5-p4=3·4-2·5-1=1,
где W - степень подвижности механизма, W=1;
n - число подвижных звеньев, n=4;
р5 - число низших кинематических пар, р5=5;
р4 - число высших кинематических пар, р4=1.
Центры вращения кривошипа, качания выходного звена с зубчатым сектором и возвратно-поворотного движения системы зубчатых колес расположены на одной прямой.
Ход ведущего звена исполнительного механизма соответствует зависимости

где S - полный ход ведущего звена;
R - радиус делительной окружности зубчатого сектора;
r2 - радиус делительной окружности малого колеса в системе зубчатых колес;
r3 - радиус делительной окружности большого колеса в системе зубчатых колес;
i - передаточное число, 
Введение в кинематическую связь выходного звена передаточного механизма с ведущим звеном исполнительного механизма дополнительных элементов зубчатого зацепления в виде системы зубчатых колес для сопряжения с упомянутыми звеньями позволяет увеличить ход поступательного движения ведущего звена исполнительного механизма, несущего выходные звенья с губками для захвата изделий. Это открывает возможность для использования манипулятора в случаях увеличенного расстояния между обслуживаемыми машинами или первичными операциями. Благоприятно и то, что передача изделий осуществляется по прямолинейной траектории.
Предложенная система зубчатых колес позволяет реализовать три пути увеличения хода выходного звена исполнительного механизма: за счет увеличения передаточного числа между зубчатым сектором и малым зубчатым колесом; за счет увеличения диаметра большого колеса при постоянном значении упомянутого передаточного числа; сочетанием обоих вариантов.
Предложенный передаточный механизм манипулятора соответствует структурной формуле кинематической цепи. Это подтверждает его работоспособность по условию Чебышева.
Расположение на одной прямой центров вращения кривошипа, качания кулисы с зубчатым сектором и поворотного движения системы зубчатых колес принято с учетом компоновки. Предложенная компоновка центров упрощает наладку, настройку и переналадку манипулятора в случаях изменения величины хода ведущего звена исполнительного механизма.
Формула (1) определяет влияние размеров зубчатого сектора, малого и большого зубчатых колес на величину хода ведущего звена исполнительного механизма. Из формулы (1) следует, что увеличение радиусов (диаметров) делительных окружностей зубчатого сектора и большого колеса системы зубчатых колес при r2=const приводит к увеличению хода S толкателя, а увеличение размеров малого зубчатого колеса при неизменных значениях параметров R и r3 приводит к уменьшению хода толкателя. Такое влияние аргументов на величину функции S=f(R, r2, r3,) необходимо учитывать при наладке и регулировке хода манипулятора.
Заявляемый манипулятор отличается от прототипа сочетанием конструктивных элементов и характером связи между ними, обеспечивающими более широкие возможности его использования при передаче изделий на различные расстояния между позициями «схват изделия» и «выдача изделия».
Предлагаемый манипулятор для передачи изделий поясняется чертежом, на котором представлена его кинематическая схема.
Манипулятор для передачи изделий содержит передаточный механизм 1, исполнительный механизм 2 с губками 3 для захвата изделий и привод, последний на чертеже не показан.
Механизм 1 выполнен в виде многозвенного рычажно-зубчатого механизма, который включает кинематически связанные звенья: кривошип 4, с которым шарнирно связан ползун 5, подвижно сопряженный с выходным звеном 6 с жестко закрепленным на нем зубчатым сектором 7, малое зубчатое колесо 8, сопряженное с зубчатым сектором и жестко и соосно связанное с большим зубчатым колесом 9 для сопряжения последнего с ведущим звеном исполнительного механизма. Кривошип 4 закреплен на валу 10 привода, выполненное в виде поворотного стержня выходное звено 6 представляет собой качающуюся кулису, смонтированную на оси 11, жестко связанной со стойкой, зубчатые колеса 8 и 9 закреплены на оси 12. Вал 10, оси 11 и 12 лежат на одной прямой.
Исполнительный механизм 2 выполнен в виде рычажно-кулачкового механизма, он включает ведущее звено 13, выполненное в виде толкателя с закрепленной на нем зубчатой рейкой 14 для сопряжения с зубчатым колесом 9, выходные звенья 15 и 16 с губками для захвата изделий и неподвижный кулачок - копир 17 с фигурными пазами 18 и 19 для сопряжения с выходными звеньями. На свободном конце толкателя 13 закреплен палец 20 для шарнирной связи с выходными звеньями, а на свободных концах последних смонтированы ролики 21 и 22 для сопряжения с фигурными пазами 18 и 19 копира 17. Поворотное движение выходных звеньев на пальце 20 относительно толкателя 13 формируется рабочими профилями фигурных пазов 18 и 19.
Губки 3 для захвата изделий выполнены по форме передаваемых изделий и закреплены на выходных звеньях жестко, но разъемно. Границы прямого и обратного ходов выходных звеньев соответствуют позициям «схват изделия» и «выдача изделия». Ролики выходных звеньев взаимодействуют с фигурными пазами копира 17 как при рабочем, так и при холостом ходах.
Манипулятор для передачи изделий работает следующим образом. При работе привода вращение кривошипа 4 передаточного механизма 1 преобразуется посредством промежуточных звеньев в сложное движение выходных звеньев 15 и 16 с губками 3 для захвата изделий. Выходные звенья совершают поступательное движение вместе с толкателем 13 и возвратно-поворотное движение относительно толкателя с выстоями определенной продолжительности.
На границах прямого и обратного ходов выходные звенья занимают положение, при котором губки оказываются разжатыми. Это обеспечивается в результате взаимодействия роликов 21 и 22 выходных звеньев с рабочими профилями фигурных пазов 18 и 19 копира 17. В позиции «схват изделия» в разжатые губки подается объект манипулирования. В момент начала рабочего хода ролики 21 и 22, взаимодействуя с фигурными пазами 18 и 19, обеспечивают такое положение выходных звеньев 15 и 16, при котором губки сжимаются. При рабочем ходе губки контактируют с изделием по большей части его периметра, надежно удерживая изделие, переносимое из одной позиции в другую.
В интервалах прямого и обратного ходов палец 20, несущий выходные звенья с губками, перемещается по прямолинейной траектории движения толкателя 13.
В позиции «выдача изделия» губки разжимаются, перестают удерживать изделие и последнее выводится из манипулятора. При обратном ходе (без изделия) губки также занимают сжатое положение, поскольку ролики выходных звеньев взаимодействуют с теми же фигурными пазами, что и при рабочем ходе.
Последующие рабочие циклы манипулятора повторяются аналогичным образом.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312008C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2232672C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2012 |
|
RU2521934C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438856C2 |
Изобретение относится к устройствам, которые применяются при обслуживании машин, станков, прессов и другого оборудования. Манипулятор содержит передаточный механизм, исполнительный механизм с губками для захвата изделий и привод. Передаточный механизм включает кинематически связанные кривошип, ползун, подвижно сопряженный с выходным звеном - поворотным стержнем с закрепленным на нем зубчатым сектором. Исполнительный механизм выполнен в виде рычажно-кулачкового механизма, который включает ведущее звено в виде толкателя с зубчатой рейкой, выходные звенья с губками для захвата изделий и неподвижный кулачок - копир с фигурными пазами для взаимодействия с выходными звеньями. На выходных звеньях смонтированы ролики для сопряжения с фигурными пазами копира. Зубчатый сектор и зубчатая рейка кинематически связаны между собой. Кинематическая связь сектора и рейки снабжена дополнительными элементами зубчатого зацепления в виде системы зубчатых колес для сопряжения с зубчатым сектором и зубчатой рейкой. Система зубчатых колес включает малое и большое зубчатые колеса, жестко и соосно связанные между собой, при этом малое колесо сопряжено с зубчатым сектором, а большое - с зубчатой рейкой. Манипулятор отличается более широкими технологическими возможностями его использования. 4 з.п. ф-лы, 1 ил.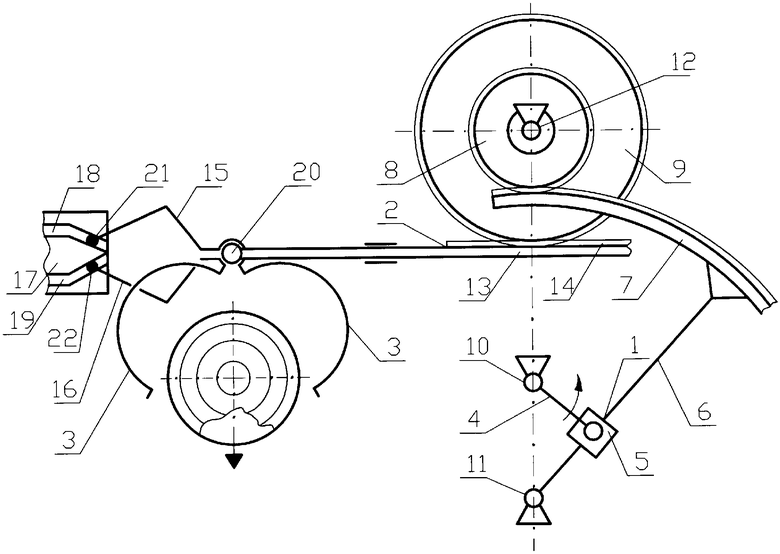
W=3·n-2p5-p4=3·4-2·5-1=1,
где W - степень подвижности механизма, W=1;
n - число подвижных звеньев, n=4;
р5 - число низших кинематических пар, р5=5;
р4 - число высших кинематических пар, р4=1.
где S - полный ход ведущего звена;
R - радиус делительной окружности зубчатого сектора;
r2 - радиус делительной окружности малого колеса в системе зубчатых колес;
r3 - радиус делительной окружности большого колеса в системе зубчатых колес;
i - передаточное число, 
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217297C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2247021C1 |

