t
tvd
Од QO
Изобретение относится к высокоскоростному наземному транспорту с электромагнитным подвешиванием и может быть использовано в областях тех НИКИ, в которых применяются магнитные опоры.
Цель изобретения - снижение энергозатрат на левитацию.
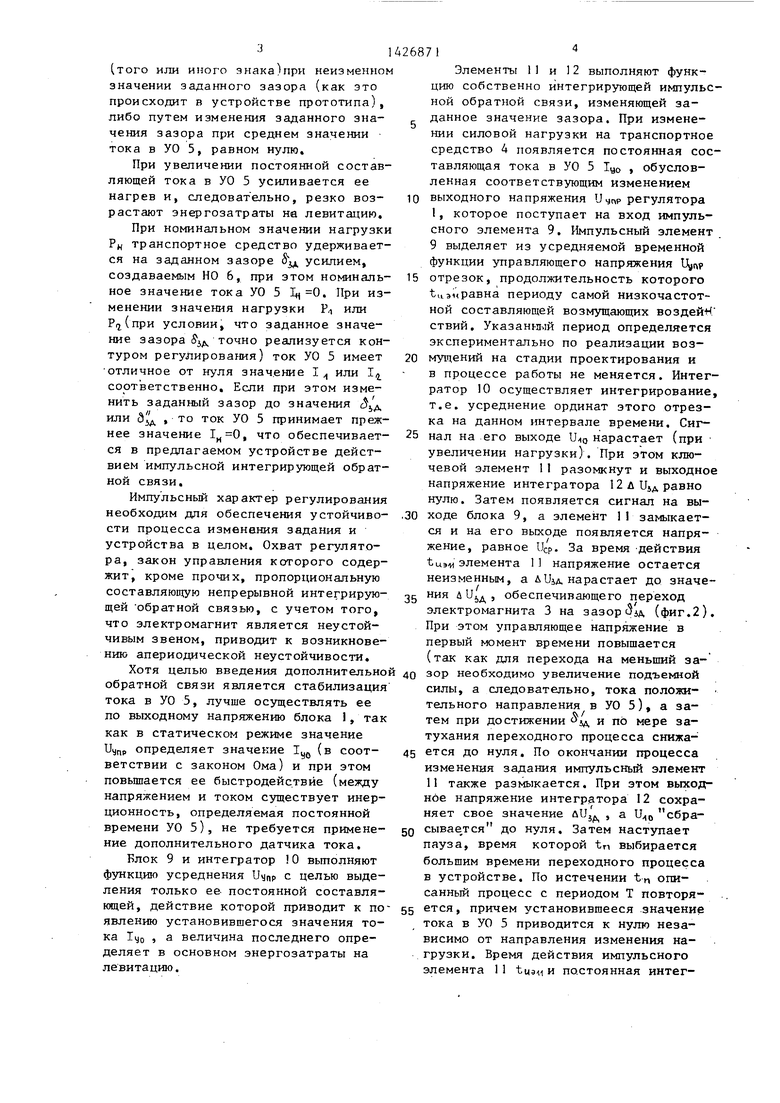
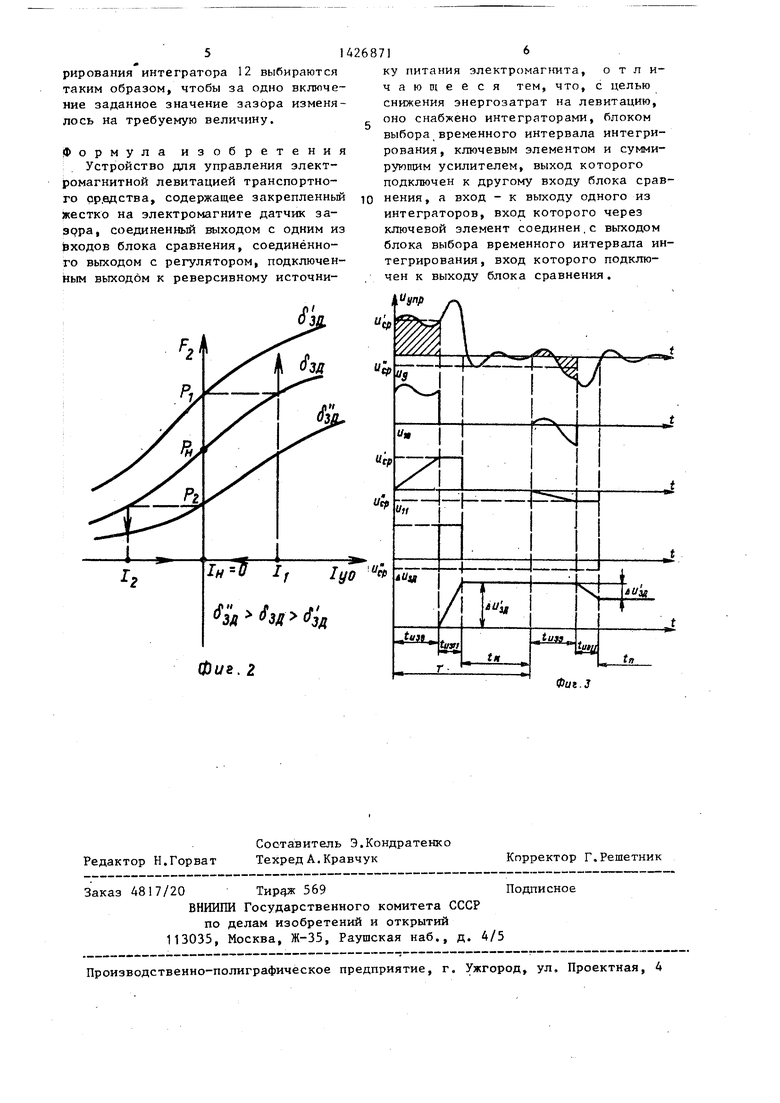
На фиг. 1 представлена функцио- нальная схема устройства; на фиг.2 - зависимость суммарной подаемной силы; на фиг. 3 - временные диаграммы процессов, происходяп;их в устройстве
Устройство содержит блок 1 орав- нения с регулятором на выходе, выход которого подключен ко входу реверсивного источника питания 2, электромагнит 3, укрепленный на транспортном средстве 4 посредством элементов эластичного подвешивания (демпфера и пружины), содержит на магнитопроводе две обмотки. Одна из них - управляемая обмотка (УО) 5 - с малым числом витков, размещенная в верхней части магнитопровода, включена в цепь нагрузки реверсивного источника питания 2, а вторая - неуправляемая обмотка (но) 6 - с большим чиспом витков, расположенная ниже управляемой обмотки, питается от источника постоянного напряжения 7, при этом величина зазора между электромагнитом 3 и феррорельсом измеряется установленным на электромагните датчиком 8 зазора, выход которого подключен к первому входу блока 1, выход которого подключен также ко входу блока 9 выбора временного интервала интегрирования, соединенного .своим выхо- дом со входом интегратора 10, выход которого подключен ко входу ключево го элемента П, к выходу которого подключен вход вт-орого интегратора 12, выход которого соединен с первым входом суммирующего усилителя 13, второй вход которого предназначен для подключении к источнику задающего напряжения, а его выход подключен ко второму входу блока 1,
Устройство работает следующим образом.
Неуправляемая обмотка 6 питается от источника постоянного напряжения 7 (фиг, ). Значение тока в ней за- дается таким, чтобы она создавала постоянную составляющую подъемной силы, удерживающую массу, приходящуюся на один электромагнит 3 на заданном зазоре (при отсутствии внешних возмущений). Ввиду того, что значение тока в НО 6 является неизменным, целесообразно подключение соединенных последовательно между собой НО нескольких электромагнитов к общему источнику 7, при этом взаимное влияние НО 6 и управляемой обмотки 5, размещенных на общем магнитопроводе, значительно снижается.
УО 5 создает переменную составляющую подъемной силы. Амплитуда и полярность тока в ней изменяются в зависимости от амплитуды и полярности отклонения зазора от заданного значения, происходящего под действие внешних возмущений (неровность фер- рорельса и др.),.При этом в магнитопроводе электромагнита 3 создается дополнительный поток, направленный согласно либо встречно потоку НО 6 и усиливая либо ослабляя подъемную силу, приводит зазор к заданному значению.
Постоянное напряжение, пропорциональное заданному значению зазора, поступает на один из входов блока I, Истинное значение зазора, измеряемое с помощью датчика зазора, поступает на другой вход блока 1, Реверсивный источник питания 2 усиливает выходное напряжение блока 1 и ток до необходимых значений.
Состояние равновесия возможно при условии равенства подъемной силы электромагнита 3 алгебраической сумме постоянных противодействующих сил (собственный Becj полезная нагрузка и др.).
в динамическом режиме при отработке внешних возмущений и постоянной нагрузке отклонения зазора от заданного значения компенсируются подачей тока той или иной полярности в УО 5. Ввиду того, что возмущения, вызванные, например, неровностью феррорельса, имеют только переменную составляющую, среднее значение тока в УО 5 близко к нулю. При этом потери энергии в ней незначительны,
Дпя обеспечения левитации при изменении результирующей противодействующей силы (например, полезной нагрузки транспортного средства) требуется изменение подъемной силы электромагнита 3, обеспечить которое возможно либо путем увеличения постоянной составляющей тока в УО 5
1426871
или иного знака)при неизменном
ци но да ни ср та л
значении заданного зазора (как это происходит в устройстве прототипа), либо путем изменения заданного значения зазора при среднем значении тока в УО 5, равном нулю.
При увеличении постоянной составляющей тока в УО 5 усиливается ее нагрев и, следовательно, резко возрастают энергозатраты на левитацию.
При номинальном значении нагрузки РК транспортное средство удерживается на заданном зазоре 5 усилием, создаваемым НО 6, при этом номинальное значение тока УО 5 IH 0. При изменении значения нагрузки Р или Р,(при условии, что заданное значение зазора точно реализуется контуром регулирования) ток УО 5 имеет отличное от нуля значение I или Т соответственно. Если при этом изменить заданный зазор до значения i$ то ток УО 5 принимает прежд/1 ЗА
Элементы 11 и 12 выполняют функцию собственно интегрирующей импуль ной обратной связи, изменяющей заданное значение зазора. При изменении силовой нагрузки на транспортно средство 4 появляется постоянная со тавляющая тока в УО 5 Туо , обусловленная соответствующим изменением
10 выходного напряжения Uynp регулятора 1, которое поступает на вход импульсного элемента 9. Импульсный элемен 9 выделяет из усредняемой временной функции управляющего напряжения
15 отрезок, продолжительность которого tu3Mравна периоду самой низкочастот ной составляющей возмущающих воздей ствий, Указанга 1й период определяетс экспериментально по реализации воз20 му1цений на стадии проектирования и в процессе работы не меняется. Инте ратор 10 осуществляет интегрировани т.е. усреднение ординат этого отрезка на данном интервале времени. Сигнее значение 1,0, что обеспечивает- 25 нал на его выходе нарастает (при
увеличении нагрузки). При этом ключевой элемент 1I разомкнут и выходно напряжение интегратора 12 ди4д равно нулю. Затем появляется сигнал на вы- ,30 ходе блока 9, а элемент 1I замыкается и на его выходе появляется напряжение, равное Ucp. За время -действия tusiH элемента 11 напряжение остается неизменным, а АUJA, нарастает до значе
ся в предлагаемом устройстве действием импульсной интегрирующей обратной связи.
Импульсный характер регулирования необходим для обеспечения устойчивости процесса изменения задания и устройства в целом. Охват регулятора, закон управления которого содержит, кроме прочих, пропорциональную
Элементы 11 и 12 выполняют функцию собственно интегрирующей импульсной обратной связи, изменяющей заданное значение зазора. При изменении силовой нагрузки на транспортное средство 4 появляется постоянная составляющая тока в УО 5 Туо , обусловленная соответствующим изменением
выходного напряжения Uynp регулятора 1, которое поступает на вход импульсного элемента 9. Импульсный элемент. 9 выделяет из усредняемой временной функции управляющего напряжения
отрезок, продолжительность которого tu3Mравна периоду самой низкочастотной составляющей возмущающих воздей Н ствий, Указанга 1й период определяется экспериментально по реализации возму1цений на стадии проектирования и в процессе работы не меняется. Интегратор 10 осуществляет интегрирование, т.е. усреднение ординат этого отрезка на данном интервале времени. Сигнал на его выходе нарастает (при
увеличении нагрузки). При этом ключевой элемент 1I разомкнут и выходное напряжение интегратора 12 ди4д равно нулю. Затем появляется сигнал на вы- ходе блока 9, а элемент 1I замыкается и на его выходе появляется напряжение, равное Ucp. За время -действия tusiH элемента 11 напряжение остается неизменным, а АUJA, нарастает до значе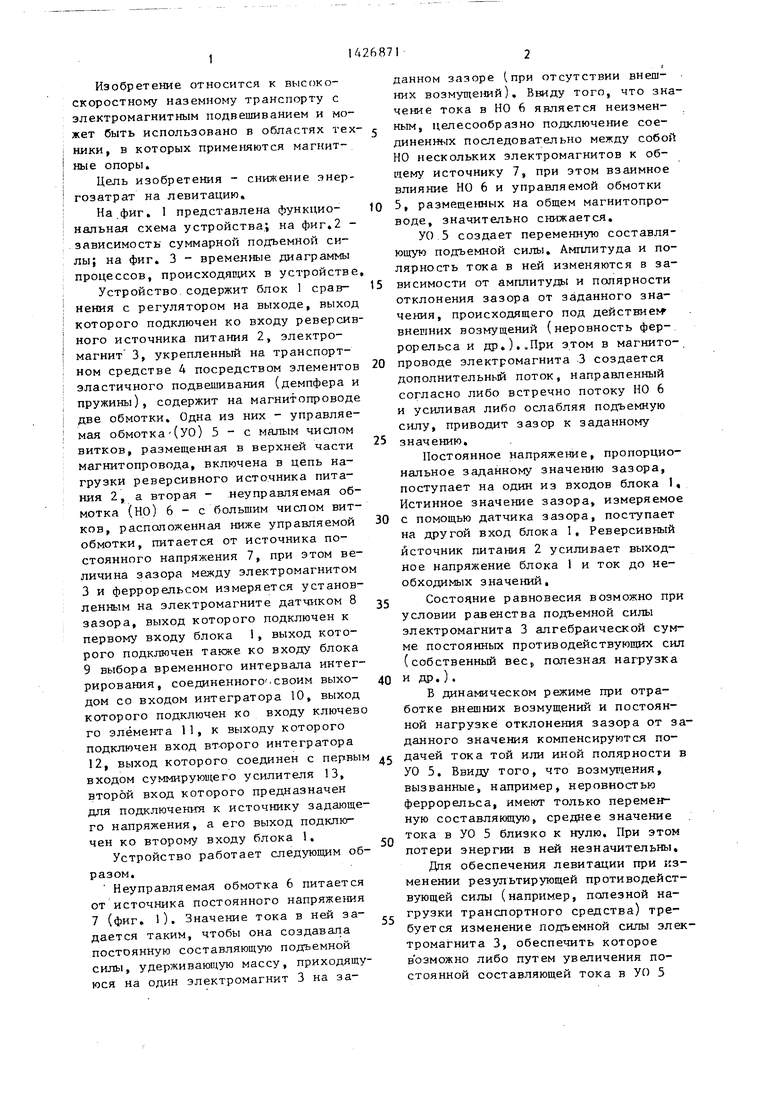
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА С КОРРЕКЦИЕЙ ПОДЪЕМНОЙ СИЛЫ | 2015 |
|
RU2611858C1 |
| КОМБИНИРОВАННЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2573524C1 |
| Электромагнитный расходомер | 1991 |
|
SU1830135A3 |
| МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ КОМБИНИРОВАННОГО ПУТЕПРОВОДА | 2014 |
|
RU2573135C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2786679C2 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2739939C1 |
| Система автоматического регулирования генератора постоянного тока | 2017 |
|
RU2676662C1 |
| Устройство для управления магнитным подвесом транспортного средства | 1989 |
|
SU1812143A1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ КОМБИНИРОВАННОГО ПОДВЕСА И ВЫСОКОСКОРОСТНОЙ МАГНИТОЛЕВИТАЦИОННЫЙ ТРАНСПОРТ С КОМБИНИРОВАННЫМ ПОДВЕСОМ, ФУНКЦИОНИРУЮЩИМ В СООТВЕТСТВИИ С ТАКИМ СПОСОБОМ | 2022 |
|
RU2782389C1 |
| Способ стабилизации среднего значения тока активной нагрузки однофазного однотактного тиристорного выпрямителя с интегратором | 1986 |
|
SU1385124A1 |
Изобретение относится к высокоскоростному наземному транспорту с электромагнитным подвешиванием и может быть использовано в областях техники, в которых применяются магнитные опоры. Цель изобретения - снижение энергозатрат на левитацию. Для обеспечения левитации при изменении силовой нагрузки потребуется изменение подъемной силы электромагнита 3, обеспечить которое возможно либо путем увеличения постоянной составляющей тока в управляемой обмотке 5 при неизменном значении заданного зазора, либо путем изменения .заданного значения зазора при среднем значении тока в управляемой обмотке 5, равном нулю, что осуществляется с помощью импульсной интегрирующей обратной связи между выходным наЬряжением регулятора и напряжением, пропорциональным заданному значению зазора, 3 ил. с (Л
составляюихую непрерывной интегрирую- 5 обеспечивающего переход
щей обратной связью, с учетом того, что электромагнит является неустойчивым звеном, приводит к возникновению апериодической неустойчивости.
электромагнита 3 на зазор (5iA (фиг При этом управляющее напряжение в первый момент времени повышается (так как для перехода на меньший з
Хотя целью введения дополнительной 40 зор необходимо увеличение подъемной
обратной связи является стабилизация тока в УО 5, лучше осуществлять ее цо выходному напряжению блока 1, так как в статическом режиме значение Uynp определяет значение 1 (в соответствии с законом Ома) и при этом повьшается ее быстродействие (мезеду напряжением и током существует инерционность, определяемая постоянной времени УО 5), не требуется применение дополнительного датчика тока.
Блок 9 и интегратор 0 вьтолняют функцию усреднения Uynp с целью выделения только ее постоянной составля45
50
силы, а следовательно, тока положительного направления в УО 5), а затем при достижении 1д и по мере затухания переходного процесса снижается до нуля. По окончании процесса изменения задания импульсный элемент 11 также размыкается. При этом вьпсод- нОе напряжение интегратора 12 сохраняет свое значение uUj , а сбрасывается до нуля. Затем наступает
пауза, время которой tn выбирается большим времени переходного процесса в устройстве. По истечении tn описанный процесс с периодом Т повторяющей, действие которой приводит к по- 55 тся, причем установившееся .значение явлению установившегося значения то- тока в УО 5 приводится к нулю неза- ка 1уо 5 а величина последнего опре- висимо от направления изменения наделяет в основном энергозатраты на грузки. Время действия импульсного левитацию.элемента 11 tuan и постоянная интег обеспечивающего переход
электромагнита 3 на зазор (5iA (фиг.2). При этом управляющее напряжение в первый момент времени повышается (так как для перехода на меньший за
силы, а следовательно, тока положительного направления в УО 5), а затем при достижении 1д и по мере затухания переходного процесса снижается до нуля. По окончании процесса изменения задания импульсный элемент 11 также размыкается. При этом вьпсод- нОе напряжение интегратора 12 сохраняет свое значение uUj , а сбрасывается до нуля. Затем наступает
1н 5 If
Фик. 2
Фиг.З
| Forschungsinformation Bahnteeh- nik: Neue Magnetkonzepte fiir die Mag- netfahrtechnik | |||
| - Eisenbahntechni- sche Rundschau-ETR, 33 (1984), H9, s | |||
| СТЕРЕОСКОП | 1921 |
|
SU726A1 |
