Изобретение относится к арматурострое- нию.
Цель изобретения - повышение точности регулирования за счет снижения инерционности компенсации позиционной нагрузки при ограниченной мощности сигнала управления.
На чертеже представлен клапан, общий вид.
Клапан содержит рабочий орган 1 со щтоком 2, управляющий их положением при- (вод 3 с линией 4 подачи управляющего сигнала, исполнительный механизм разгрузки клапана в виде пневмопривода 5, чувствительный элемент 6 которого связан со щтоком 2.
К пневмоприводу 5 подключен через дискретный распределитель 7 пневматический формирователь 8 сигнала для компенсации позиционной нагрузки с источником энергии, выполненный в виде решающего блока. Пневматический формирователь 8 сигнала подключен также через дискретный распределитель 9 к пневматическому выходу 10 согласующего преобразователя 11, линия 12 подвода преобразуемого сигнала к которому связана с линией 4.
Клапан работает следующим образом.
Для перемещения рабочего органа 1 в требуемое положение на привод 3 подается управляющий сигнал А вх, ограниченный по мощности конструктивным расчетом элементов привода. Одновременно управляющий сигнал поступает в согласующий преобразователь 11, где он преобразуется в пропорциональное ему давление PI сжатого воздуха, согласованное по уровню и диапазону изменения с техническими условиями эксплуатации элементов, входящих в состав пневматического формирователя 8, поскольку сам управляющий сигнал может не удовлетворять этим условиям и не быть пневматическим. Из согласующего преобразователя пневматический сигнал через распре0
5
0
делитель 9 поступает в пневматический формирователь 8.
Пневматический формирователь 8 настроен в соответствии с изменением позиционной нагрузки, действующей на рабочий орган 1 под влиянием потока рабочей среды, и формирует на выходе пропорциональный пневматический сигнал Р2 для компенсации этой нагрузки.
С выхода пневматического формирователя сигнал подается через распределитель 7 в зависимости от направления действия позиционной нагрузки в одну из камер пневматического привода 5, создавая тем самым на щтоке 2 уравновешивающее усилие для разгрузки клапана.
Установка в нужное положение распределителей и настройка пневматического формирователя производятся вручную одноразово при наладке клапана в целом на конкретные условия работы.
Формула изобретения
Уравновешенный регулирующий клапан, содержащий рабочий орган со штоком, управляющий их положением привод с линией подачи управляющего сигнала, исполнительный механизм разгрузки клапана в виде пневмопривода, чувствительный элемент которого связан со штоком, последовательно расположенные согласуюший преобразователь с линией подвода преобразуемого сигнала и пневматическим выходом, пневматический формирователь сигнала для компенсации позиционной нагрузки с источником энергии, выполненный в виде решающего блока, и дискретные распределители, один
из которых установлен до формирователя и подключен к пневмоприводу, а другой - после и подключен к пневматическому выходу преобразователя, отличающийся тем, что, с целью повыщения точности регулирования линия подачи управляющего сигнала сообщена с линией подвода преобразуемого сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки регулирующего клапана | 1980 |
|
SU934133A1 |
| Реверсивный позиционный пневмогидропривод перемещения инерционных объектов | 1975 |
|
SU532507A1 |
| Многопозиционный пневмопривод | 1980 |
|
SU877158A1 |
| Электрогидравлическая система управления насосной установкой | 1986 |
|
SU1418505A1 |
| Пневмопривод прерывистого вращательного движения | 1982 |
|
SU1092309A1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| Пневматическая система автоматического регулирования загрузки двигателя уборочной машины | 1980 |
|
SU1029849A1 |
| Реверсивный позиционный пневмогидравлический привод | 1974 |
|
SU465864A1 |
| Следящий позиционный пневмопривод | 1983 |
|
SU1110946A1 |
| Пневмогидравлический цифровой позиционный привод | 1981 |
|
SU1021827A1 |
Изобретение относится к арматуро- строению. Цель изобретения - повышение точности регулирования за счет снижения инерционности компенсации позиционной нагрузки при ограниченной мощности сигнала управления. Положение рабочего органа 1 клапана задается величиной управляющего сигнала, подаваемого по линии 4 к приводу 3. Изменение позиционной нагрузки на рабочем органе, возникающее в результате его перемещения, компенсируется механизмом разгрузки клапана, выполненным в виде пневмопривода 5, подключенного через дискретный распределитель 7 к пневматическому формирователю сигнала 8, настроенному по изменению позиционной нагрузки. К пневматическому формирователю сигнала подключен своим пневматическим выходом согласующий преобразователь 11, который для достижения указанного результата своей линией подвода преобразуемого сигнала связан с линией 4. 1 ил. 8Х to (Л РТ 7ТБ ю ND 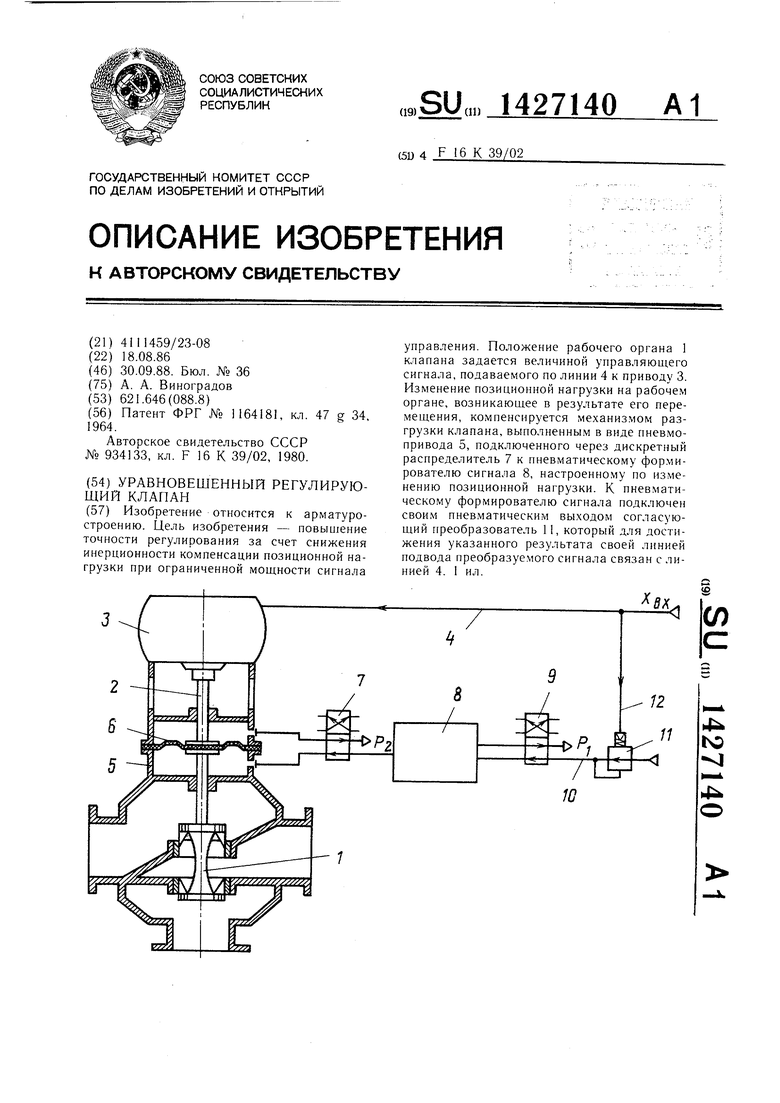
| Устройство для послойной укладки конвейерной ленты | 1984 |
|
SU1164181A1 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Устройство для разгрузки регулирующего клапана | 1980 |
|
SU934133A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
