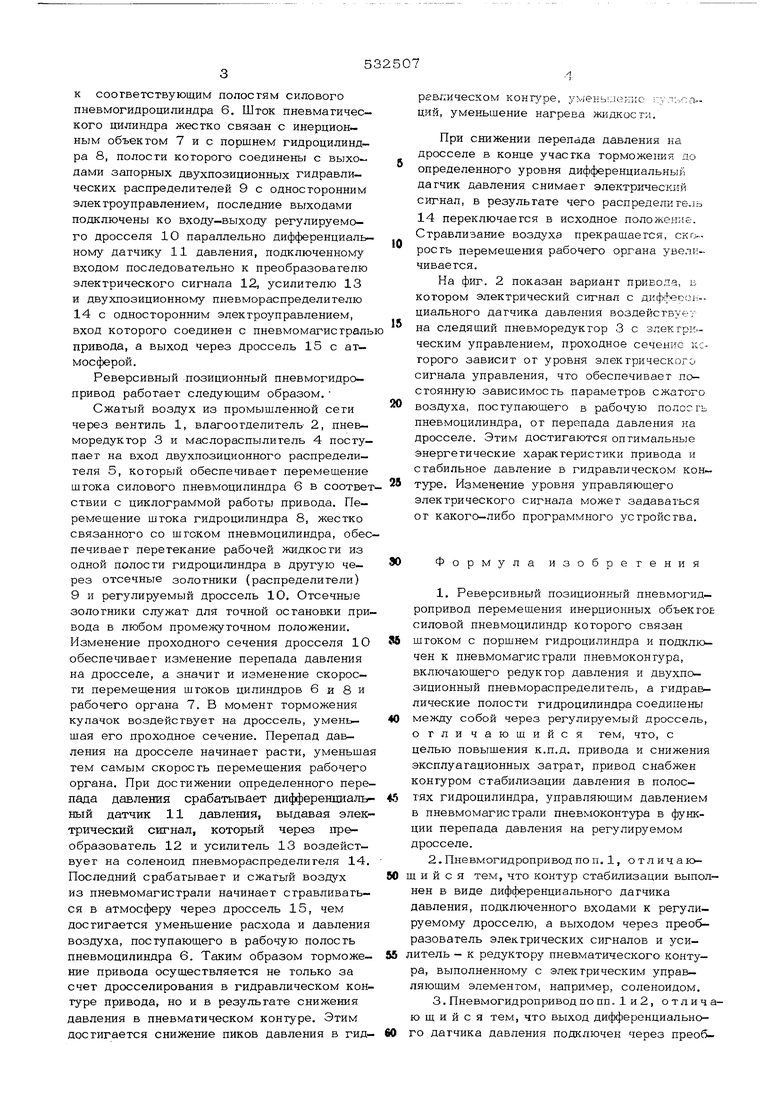
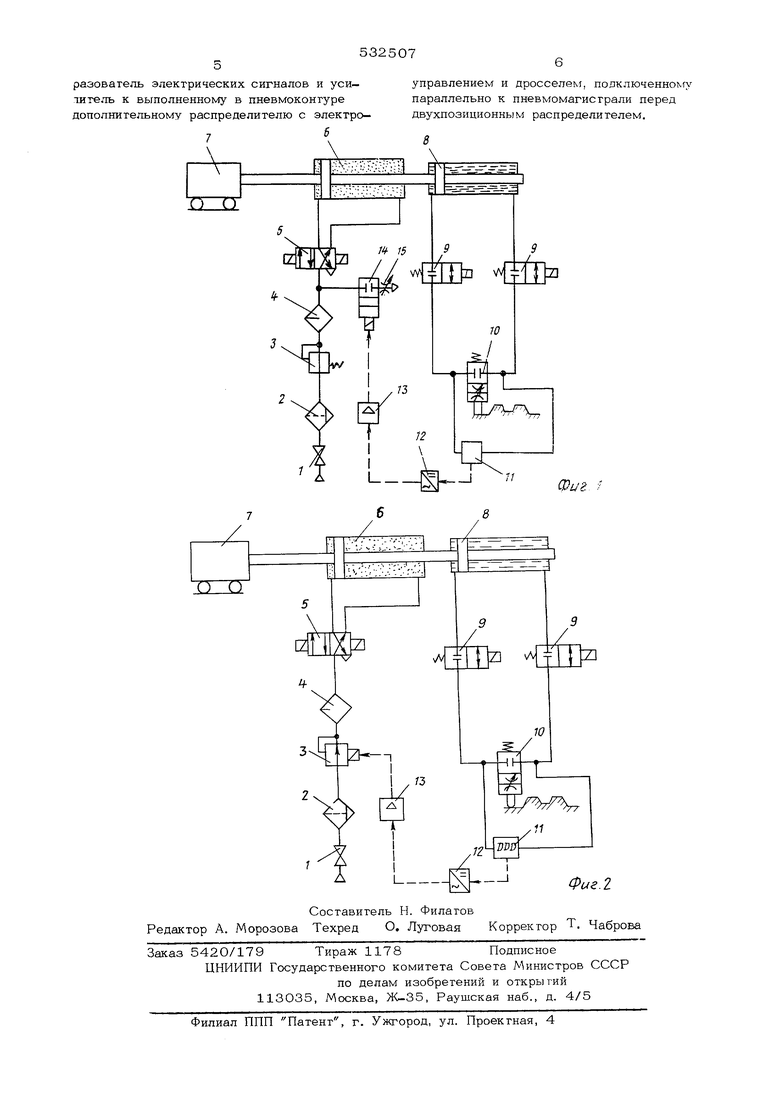
к соответствующим полостям силового пневмогидроцилиндра 6. Шток пневматического цилиндра жестко связан с инерционным объектом 7 и с поршнем гидроцилинд- ра 8, полости которого соединены с выхо дами запорных двухпозиционных гидравлических распределителей 9 с односторонним электроуправлением, последние выходами подключены ко входу-выходу регулируемого дросселя 10 параллельно дифференциальному датчику 11 давления, подключенному входом последовательно к преобразователю электрического сигнала 12, усилителю 13 и двухпозиционному пневмораспределителю 14 с односторонним электроуправлением, вход которого соединен с пневмомагистраль привода, а выход через дроссель 15 с атмосферой. Реверсивный позиционный пневмогидропривод работает следующим образом. Сжатый воздух из промышленной сети через вентиль 1, влагоотделитель- 2, пнев- моредуктор 3 и маслораспылитель 4 поступает на вход двухпозиционного распределителя 5, который обеспечивает перемещение щтока силового пневмоцилиндра 6 в соответ ствии с циклограммой работы привода. Перемещение щтока гидроцилиндра 8, жестко связанного со штоком пневмоцилиндра, обес печивает перетекание рабочей жидкости из одной полости гидроцилиндра в другую через отсечные золотники (распределители) 9 и регулируемый дроссель 10. Отсечные золотники служат для точной остановки при вода в любом промежуточном положении. Изменение проходного сечения дросселя 10 обеспечивает изменение перепада давления на дросселе, а значит и изменение скорости перемещения штоков цилиндров 6 и 8 и рабочего органа 7. В момент торможения кулачок воздействует на дроссель, уменьшая его проходное сечение. Перепад давления на дросселе начинает расти, уменьща тем самым скорость перемещения рабочего органа. При достижении определенного пере пада давления срабатывает дифференциаль ный датчик 11 давления, выдавая элек трический сигнал, который через преобразователь 12 и усилитель 13 воздействует на соленоид пневмораспределителя 14. Последний срабатывает и сжатый воздух из пневмомагистрали начинает стравливаться в атмосферу через дроссель 15, чем достигается уменьшение расхода и давления воздуха, поступающего в рабочую полость пневмоцилиндра 6. Таким образом торможение привода осуществляется не только за счет дросселирования в гидравлическом кон туре привода, но и в результате снижения давления в пневматическом контуре. Этим достигается снижение пиков давления в гид ргвлическом контзфе, умекьиеккс гульсаций, уменьшение нагрева жидкоеги. При снижении перепада давления на дросселе в конце участка торможения до определенного уровня дифференциальный датчик давления снимает электрическлй сигнал, в результате чего распределитель 14 переключается в исходное положение. Стравлизание воздуха прекращается, скг. рость перемещения рабочего органа увеличивается. На фиг. 2 показан вариант привода, в котором электрический сигнал с дкффесои-циального датчика давления воздействует на следящий пневморедуктор 3 с электрическим управлением, проходное сечение ксторого зависит от уровня электрического сигнала управления, что обеспечивает постоянную зависимость параметров сжатого воздуха, поступающего в рабочую полость пневмоцилиндра, от перепада давления на дросселе. Этим достигаются оптимальные энергетические характеристики привода и стабильное давление в гидравлическом контуре. Изменение уровня управляющего электрического сигнала может задаваться от какого-либо программного устройства. Формула изобретения 1. Реверсивный позиционный пневмогид- ропривод перемещения инерционных объектов силовой пневмоцилиндр которого связан щтоком с поршнем гидроцилиндра и подключен к пневмомагистрали пневмоконтура, включающего редуктор давления и двухпозиционный пневмораспределитель, а гидравлические полости гидроцилиндра соединены между собой через регулируемый дроссель, отличающийся тем, что, с целью повышения к.п.д. привода и снижения эксплуатационных затрат, привод снабжен контуром стабилизации давления в полостях гидроцилиндра, управляющим давлением в пневмомагистрали пневмоконтура в функции перепада давления на регулируемом дросселе. 2. Пневмогидропривод поп. 1, отл ич аюи и с я тем, что контур стабилизации выполнен в виде дифференциального датчика давления, подключенного входами к регулируемому дросселю, а выходом через преобразователь электрических сигналов и усиитель - к редуктору пневматического контура, выполненному с электрическим управляющим элементом, например, соленоидом. 3. Пневмогидропривод по пп.1и2, отличающийся тем, что выход дифференциального датчика давления подключен через преоб56
разовагель электрических сигналов и уси-управлением и дросселем, подкпюченнокгу
литель к выполненному в пневмоконгурепараллельно к пневмомагисграли перед
дополнительному распределителю с электро-двухпозиционным распределителем.
7{
532507 
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидропривод | 1980 |
|
SU941702A1 |
| Система синхронизации скорости поршней силовых цилиндров | 1979 |
|
SU770741A1 |
| Реверсивный позиционный пневмогидравлический привод | 1976 |
|
SU577749A2 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Установка для деформирования трубчатых заготовок | 1982 |
|
SU1065061A1 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ ЗОЛОТНИКОВЫЙ ЭЛЕКТРОПНЕВМОРАСПРЕДЕЛИТЕЛЬ С ОДНОСТОРОННИМ УПРАВЛЕНИЕМ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2242575C1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС | 2006 |
|
RU2334619C2 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ ЗОЛОТНИКОВЫЙ ЭЛЕКТРОПНЕВМОРАСПРЕДЕЛИТЕЛЬ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2266439C2 |
| ПНЕВМОГИДРАВЛИЧЕСКИЙ ПОЗИЦИОННЫЙ ПОДАЧИ ИНЕРЦИОННЫХ ОБЪЕКТОВПРИВОД | 1973 |
|
SU418639A1 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2779263C1 |
