Изобретение относится к гидроавтомати- ке и может быть использовано в гидро- приводах строительных и дорожных машин. Цель изобретения - повы шение долговечности и надежности.
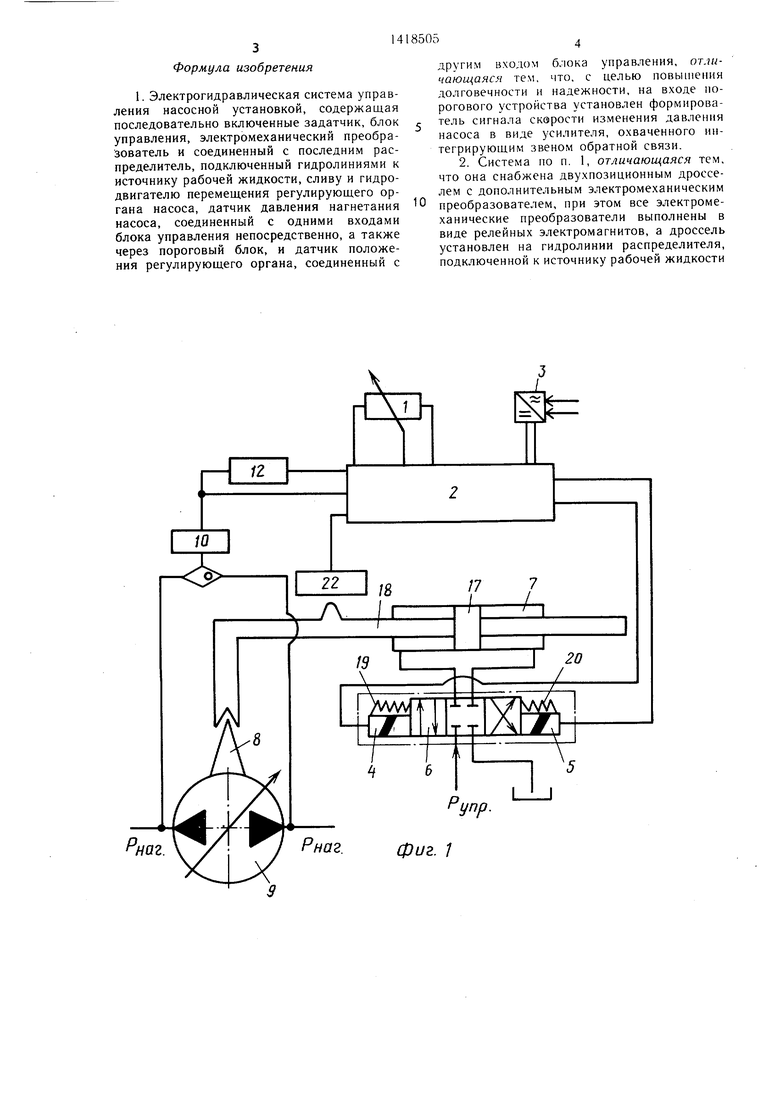
На фиг. 1 изображена схема электрогидравлической системы управления насос- НОЙ установкой; на фиг. 2 - схема формирователя сигнала скорости изменения давления насоса и порогового блока; на фиг. 3 - схема системы, снабженной двух- позиционным дросселем. Система содержит последовательно включенные задатчик 1, блок 2 управления с источником 3 электропитания, электромеха- нический преобразователь выполненный в виде электромагнитов 4 и 5, соединенный с последними распределитель 6, подклю- ченный гидролиниями (не обозначены) к сливу, источнику рабочей жидкости (не изоб- ражен) и гидродвигателю, например гидро- цилиндру 7 перемещения регулирующего органа 8 насоса 9, датчик 10 давления нагнетания насоса 9, соединенный с входами блока 2 непосредственно, а также через пороговый блок в виде компаратора 11, на входе которого установлен формирователь 12 сигнала скорости изменения давления насоса 9 в виде усилителя 13 охваченного интегрирующим звеном 14 обратной связи. Система снабжена двухпозиционным дросселем 15 с дополнительным электромеханическим преобразователем в виде электромагнита 16, при этом электромагниты 4, 5 и 16 выполнены релейными, а дроссель 15 установлен на гидролинии распределителя 6 подключенной к источнику рабочей жидкости, Гидроцилиндр 7 имеет порщень 17 и щток 18, распределитель б имеет пружины 19 и 20, дроссель 15 подпружинен пружиной 21. К другому входу блока 2 подключен датчик 22 положения регулирующего органа 8. Электрогидравлическая система работает следующим образом.
В блоке 2 происходит сравнение сигналов задатчика 1 и датчика,22. При наличии рассогласования этих сигналов блок 2 подает команду об изменении производительности насоса 9 на распределитель 6. Мощность сигнала, поступающего с блока 2 на распределитель 6, пропорциональна величине рассогласования и определяет величину смещения распределителя 6 и скорость перемещения управляемого им порщ- ня 17 гидроцилиндра 7.
При перемещении поршня 17 величина рассогласования сигналов задатчика 1 и датчика 22 уменьшается и в- тот момент, когда она с заданной степенью точности становится равной нулю, блок 2 выключает распределитель 6, который под действием пружин 19 и 20 возвращается в нейтральное положение. Исполнительный гидроцилиндр 7 запирается и порщень 17 останавливается, удерживая регулирующий орган 8 в положении, обеспечивающем требуемую производительность Q насоса 9. В процессе регулирования осуществляется ав- томатическое ограничение мощности N.
Датчик 10 давления направляет электрические сигналы, соответствующие величине давления нагнетания, на блок 2 и на формирователь 12. Если величина давления нагнетания Р окажется равной , 0
блок 2 автоматически дает команду на уменьшение производительности Q и выполняет эту операцию до тех пор, пока от;- нощение -rf станет равным Р.
Если скорость, с которой возрастает давление нагнетания Р, превышает заранее заданную величину, блок 2 по сигналу с компаратора 11 дает команду на умень- щение производительности Q насосной ус0 тановки до того момента, когда Р станет
равным Ркр.-, т. е. при .
Величина скорости нарастания давления Р, при которой срабатывает компаратор 11, и разность Ркр.-Р, определяющие момент
реагирования блока 2 на резкое увеличение давления нагнетания, рассчитываются исходя из конкретных данных по инерционности и времени запаздывания всех звеньев электрогидравлической системы.
- При высокой скорости нарастания давления нагнетания блок 2 дает команду на снижение производительности Q насоса 9 заранее, до того момента, когда мощность N, определяемая произведением Q- Р, выходит за установленные пределы. Это позволяет
- компенсировать постоянные времени запаздывания всех звеньев электрогидравлической системы управления и исключить перегрузки.
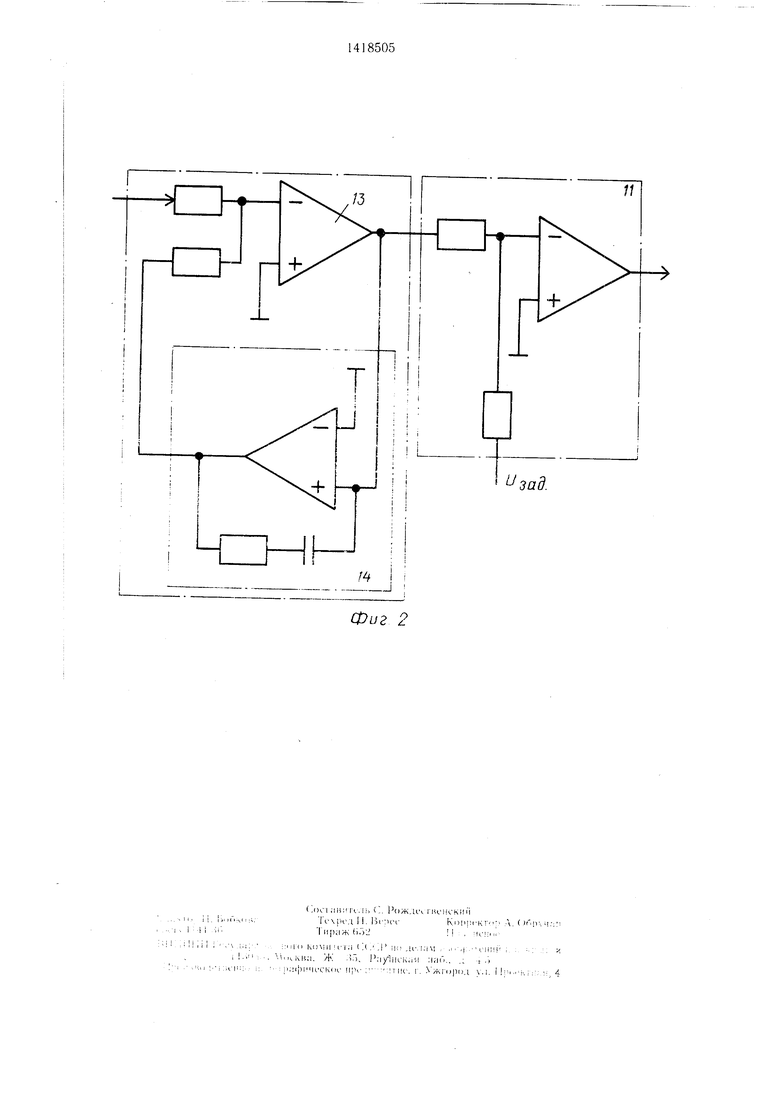
Работа системы с дросселем 15 (фиг. 3) осуществляется аналогично, причем при по0 даче управляющего сигнала с блока 2 включается соответствующий релейный электромагнит распределителя 6 и смещается в одну из сторон. При этом осуществляется подача полного (недросселируемого) потока рабочей жидкости в гидроцилиндр 7, в ре зультате чего порщень 17 перемещается с максимальной скоростью.
При приближении порщня 17 к заданному положению срабатывает датчик 22, блок 2 включает электромагнит 16 и дроср сель 15 обеспечивает дросселирование потока рабочей жидкости, направляемой через распределитель 6 к гидроцилиндру 7, в результате чего скорость поршня 17 уменьшается.
Вариант исполнения системы (фиг. 3)
5 обеспечивает максимальную скорость при значительных перемещениях поршня 17 и минимальную скорость при малых перемещениях.
Формула изобретения
. Электрогидравлическая система управления насосной установкой, содержащая последовательно включенные задатчик, блок управления, электромеханический преобразователь и соединенный с последним распределитель, подключенный гидролиниями к источнику рабочей жидкости, сливу и гидродвигателю перемещения регулирующего органа насоса, датчик давления нагнетания насоса, соединенный с одними входами блока управления непосредственно, а также через пороговый блок, и датчик положения регулирующего органа, соединенный с
другим входом блока управления, отличающаяся тем, что. с целью повышения долговечности и надежности, на входе порогового устройства установлен формирователь сигнала скорости изменения давления насоса в виде усилителя, охваченного интегрирующим звеном обратной связи.
2. Система по п. 1, отличающаяся тем. что она снабжена двухпозиционным дросселем с дополнительным электромеханическим
преобразователем, при этом все электромеханические преобразователи выполнены в виде релейных электромагнитов, а дроссель установлен на гидролинии распределителя, подключенной к источнику рабочей жидкости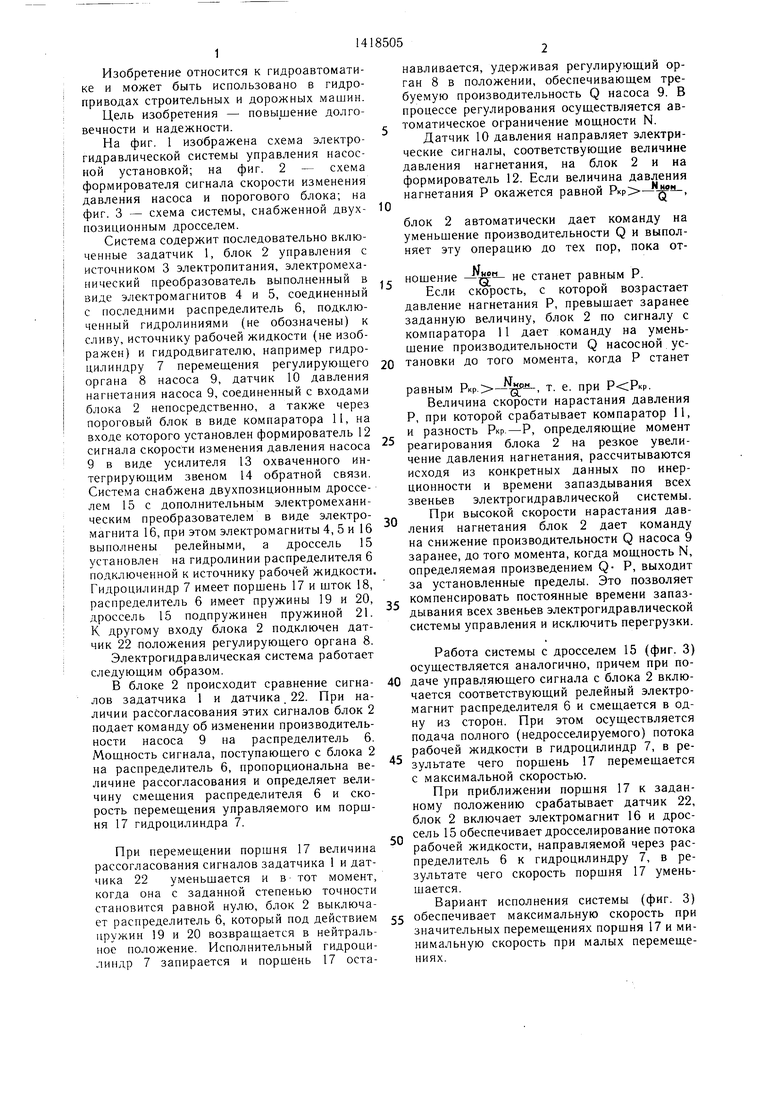
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулируемый гидропривод | 1982 |
|
SU1064056A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2215911C1 |
| Электрогидравлическая система управления насосной установкой | 1988 |
|
SU1525344A1 |
| Устройство управления рабочим процессом землеройно-транспортной машины | 1986 |
|
SU1323672A1 |
| Электрогидравлическая система командного управления многокоординатной строительно-дорожной машины | 1985 |
|
SU1344873A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029891C1 |
| Электрогидравлический привод подачидЕРЕВООбРАбАТыВАющЕгО CTAHKA | 1980 |
|
SU852540A1 |
| Электрогидравлическое устройство подачи исполнительного органа камнерезной машины | 1976 |
|
SU592603A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1989 |
|
SU1680858A1 |
| Регулятор аксиально-поршневого насоса | 1988 |
|
SU1643817A1 |
изобретение м. б. использовано в строительных и дорожных 1машинах. Цель изобретения -- повьинение долговечности и надежности системы. Датчик 10 давления насоса 9 и датчик 22 положения регулирующего органа соединены с входами оло- ка 2 унравления, подключенного к вы.ходу задатчика 1. Выход блока 2 связан с элек- тро.механически.м преобразователем, вынол- ненны.м в виде релейных электромагнитов 4, 5 распределителя 6, сообщающего нолос.ти гидропилиндра 7 перемещения регулируюн1е- го органа 8 насоса 9 с источником рабочей жидкости и сливом. Датчик 10 связан с блоком 2 также через пороговый б. юк в виде компаратора, на входе к-рого установлен формирователь 12 сигнала скорости изменения давления насоса 9 в виде усилителя, охваченного интегрируюн1им звеном обратной связи. Система м. б. снабжена двухпозиционным дросселем 15 с элек- тромеханцческим преобразовате,1ем в виде релейного электромагнита 16, установленным между источником рабочей жидкости и распределителем 6. 1 з. п. ф-лы, 3 лл о (Л с: 00 ел о СП
Фиг 2
| Гидравлический источник питания | 1979 |
|
SU981712A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
