00
ю
Изобретение относится к машиностроению, в частности к станко- и агрегатостроению, и может быть использовано в качестве позиционного привода промышленных манипуляторов и других гидрофицированных исполнительных устройств.
Известен пневмогидравлический цифровой позиционный привод, содержащий исполнительный гидроцилиндр с рабочими полостями, пневмоприводной насос, пневмогидравлический цифровой преобразователь, включающий цифровой пневмоцилиндр с выходным штоком и гидрокамеру с установленным в нем поршнем, жестко связанным со штоком пневмоцилиндра с образованием поршневой и штокоБОЙ полостей, четырехлинейный распределитель, сливная линия которого связана через обратный клапан с поршневой полостью гидрокамеры, и компенсационную емкость 1.
Недостатком известного привода является постоянное однозначное соответствие между ходом поршня пневмогидравлического цифрового преобразователя и перемещением выходного штока исполнительного гидроцилиндра. Подобная схема управления не обеспечивает гибкой регулировки перемещения штока исполнительного гидроцилиндра, например, при необходимости перемещений на длину, меньшую, чем максимальная. При этом отсутствует возможность повышения точности позиционирования в пределах заданной конструкции. Указанная особенность схемы управления обуславливает при изменении рабочих ходов соответственно необходимость производить замену исполнительных гидроцилиндров, что существенно усложняет эксплуатацию позиционных систем, их стоимость и металлоемкость.
Кроме того, по завершении перемещения поршня исполнительного гидроцилиндра вследствие сжимаемости жидкости имеют место длительные колебательные процессы с регулированием как по скорости, так и по координате. Это обстоятельство существенно снижает быстродействие привода и сужает область его применения.
Целью изобретения является расширение функциональных возможностей привода.
Поставленная цель достигается тем, что пневмогидравлический цифровой позиционный привод, содержащий исполнительный гидроцилиндр с рабочими полостями, пневмоприводной насос, пневмогидравлический цифровой преобразователь, включающий цифровой пневмоцилиндр с выходным штоком и гидрокамеру с установленным в нем поршнем, жестко связанным со штоком пневмоцилиндра с образованием порщневой и штоковой полостей, четырехлинейный распределитель, сливная линия которого связана через обратный клапан с поршневой полостью гидрокамеры, и компенсационную емкость, снабжен управляющим устройством, вход которого связан со сливной линией распределителя, а выход - с компенсационной емкостью.
Управляющее устройство может быть выполнено в виде регулируемого дросселя, или в виде дозатора.
Кроме того, привод снабжен демпфирующим устройством, выполненным, на пример, в виде регулятора потока с исполнительным элементом, установленным с возможностью взаимодействия со штоком пневмоцилиндра, дополнительно снабженным копиром, причем вход регулятора потока связан со штоковой полостью гидрокамеры, а выход - с компенсационной емкостью.
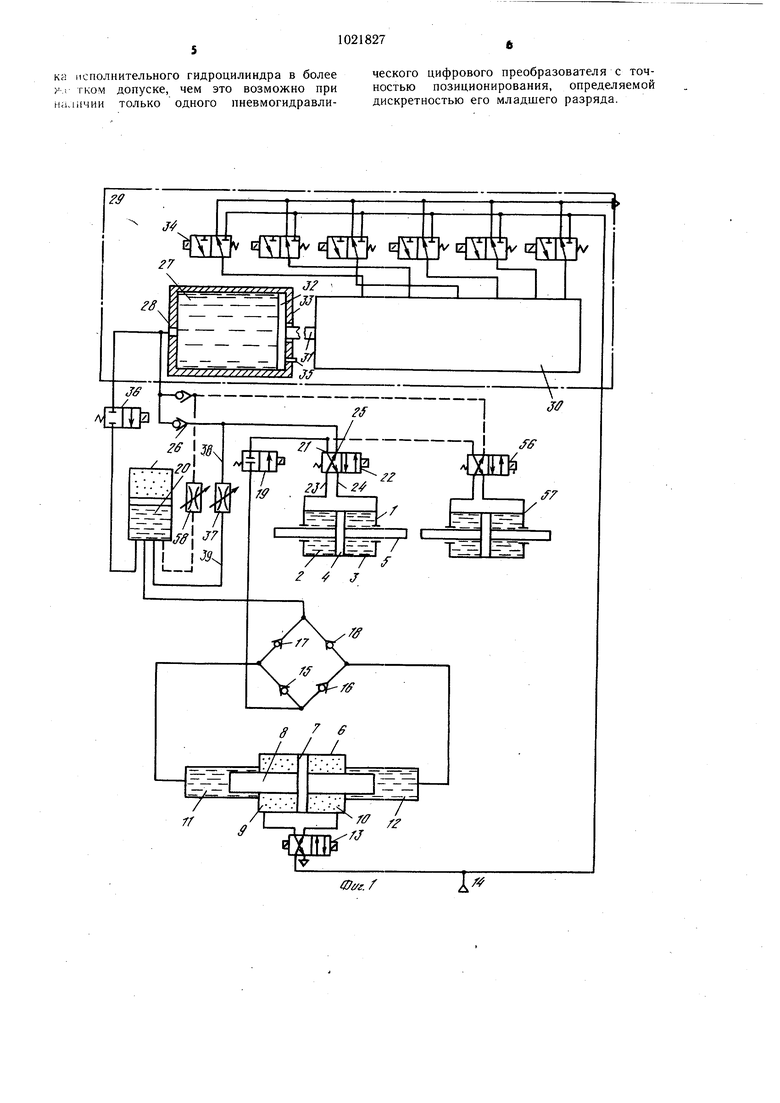
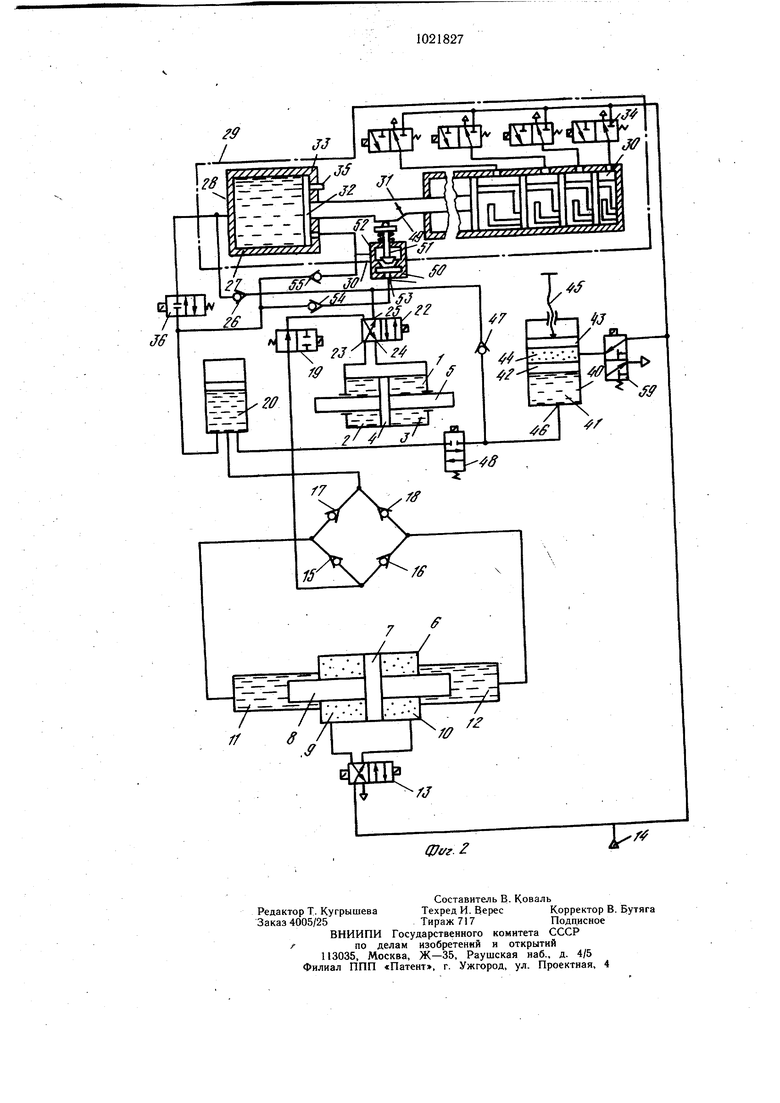
На фиг. 1 представлена принципиальная схема привода с управляющим устройством, выполненным в виде регулируемого дросселя; на фиг. 2 - принципиальная схема привода с управляющим устройством, выполненным в виде дозатора, и демпфирук)щим устройством.
Пневмогидравлический цифровой позиционный привод содержит исполнительный гидроцилиндр 1 с рабочими полостями 2 и 3, порщнем 4 с двусторонним штоком 5, пневмоприводной насос 6, включающий порщень 7, двусторонний пЛунжер 8, управляющие пневмополости 9 и 10, гидрополости Пи 12. Пневмополости 9 и 10 подключены через пневмораспределитель 13 к источнику 14 сжатого газа и атмосфере, а гидрополости И и 12 через систему обратных клапанов 15-18 подключены к распределителю 19 и компенсационной емкости 20. Распределитель 19 снабжен входной линией 21 четырехлинейного распределителя 22, выходные линии 23 и 24 которого связаны с рабочими . полостями 2 и 3 гидроцилиндра 1, а сливная линия 25 через обратный клапан 26 - с порщневой полостью 27 гидрокамеры 28, входящей в пневмогидравлический цифровой преобразователь 29, включающий также цифровой пневмоцилиндр 30 с выходным штоком 31, жестко связанным с порщнем 32, образующим в гидрокамере 28 штоковую полость 33 и вышеуказанную порщневую полость 27, и пневмораспределители 34, количество которых определяется числом разрядов управления цифрового пневмоцилиндра 30. Порщень 32 выполнен с возможностью взаимодействия с концевым переключателем 35, поршневая полость 27 через двухлинейный распределитель 36 сообщена с компенсационной емкостью 20.
Кроме того, привод снабжен управляющим устройством, выполненным, например, в виде регулируемого дросселя 37 (фиг. 1), вход 38 которого сообщен со сливной линией 25 распределителя 22, а выход 39 - с компенсационной емкостью 20, либо в виде дозатора 40 (фиг. 2), включающего регулируемую емкость 41, плавающий порщень 42, разделитель 43, пневмокамеру 44,
элемент 45 регулировки, и объединенные вход и выход 46, сообщенные соответственно через обратный клапан 47 со сливной линией 25 распределителя 22, а через двухлинейный распределитель 48 - с компенсирующей емкостью 20. Шток 31 (фиг. 2) цифрового пневмоцилиндра 30 снабжен копиром 49 и взаимодействует с демпфирующим устройством, выполненным в виде регулятора 50 потока с чувствительным элементом 51, вход 52 которого сообщен со щтоковой полостью 33, а выход 53 через обратный клапан 54 - с компенсационной емкостью 20. Распределитель 36 (фиг. 2) через обратный клапан 55 сообщен со щтоковой полостью 33 гидрокамеры 28. На фиг. 1 пунктирной линией обозначена связь распределителя 19 с резервными четырехлинейным распределителем 56, исполнительным гидроцилиндром 57 и регулируемым дросселем 58, обеспечивающая повыщение на дежности привода, либо работу его на два объекта. Пневмо.камера 44 (фиг. 2) дозатора 40 подключена к источнику 14 через пневмораспределитель 59.
Привод работает следующим образом.
В исходном положении (фиг. 1 и 2) рабочая жидкость из компенсационной емкости 20 через обратные клапаны 17 и 18 поступает в гидрополости 11 и 12.
При подаче команды на один или несколько пневмораспределителей 34 срабатывает цифровой пневмоцилиндр 30, и выходной шток 31 перемещается на заданное расстояние. Порщень 32, связанный со щтоком 31, вытесняет соответствующий объем рабочей жидкости в компенсационную емкость 20 через предварительно включенный распределитель 36 и в штоковую полость 33 (фиг. 2) через обратный клапан 55 После срабатывания цифрового пневмоцилиндра 30 и отключения пневмораспределителей 34 распределитель 36 обесточивается и устанавливается в исходную позицию, а распределитель 19 включается, и рабочая жидкость из гидрополости 11 под воздействием плунжера 8 через обратный клапан 15 поступает в рабочую полость 3 исполнительного гидроцилиндра 1. Вытесняемая из рабочей полости 2 жидкость со сливной линии 25 распределителя 22 поступает через обратный клапан 26 в порщневую полость 27 гидрокамеры 28, устанавливая пневмоцилиндр 30 в исходное положение, а также через регулируемый дроссель 37 в компенсационную емкость 20 (фиг. 1), с помощью которого производится настройка точности и величины перемещения щтока 5 исполнительного гидроцилиндра I.
На фиг. 2 жидкость из сливной линии 25 распределителя 22 через обратный клапан 47 также поступает в регулируемую емкость 41 дозатора 40. Порщень 32 гидрокамерь 28 возвращается в исходное положение, а плавающий порщень 42 дозатора 40 перемещается к разделителю 43, взаимодействующему с элементом 45 регулировки. По мере приближения порщня 32 к исходному положению, а щтока 5 исполнительного гидроцилиндра 1 - к координате позиционирования, чувствительный элемент 51 регулятора 50 потока наезжает на копир 49, тем самым изменяя гидравлическое сопротивление линии связи порщневой полости 33 с компенсационной емкостью 20 до такого значения, при котором подход щтока 5 и гидроцилиндра 1 выходного щтока 31 пневмоцилиндра 30 к координатам позиционирования осуществляется в допусТИМОМ диапазоне скоростей.
При достижении крайнего положения порщня 32 (фиг. 1 и 2) последний взаимодействует с концевым переключателем 35, подающим сигнал на распределитель 19, который разобщает гидрополость 11 с рабочей полостью 3 гидроцилиндра 1.
Кроме того (фиг. 2), включается распределитель 48, сообп1ающий регулируемую емкость 41 дозатора 40 с компенсационной емкостью 20. Рабочая жидкость из регулируемой емкости 41 под действием давления сжатого газа в пневмокамере 44 вытесняется в компенсацконную емкость 20, после чего распределитель 48 отключает- . ся. Далее цикл работы привода повторяется. При этом за счет переключения пнсвмораспределИтеля 13 рабочая жидкость вытесняется из гидрокамеры 12 пневмоприводного насоса 6. Реверсирование исполнительного гидроцилиндра 1 осуществляется за счгт переключения распределителя 22. Введение в схему регулирования управляющего устройства, выполненного, например, в 5 виде регулируемого дросселя 37, либо дозатора 40, позволяет существенно уменьщить количество разрядов цифрового пневмоцилиндра 30 и объем гидрокамеры 28 преобразователя 29, поскольку нет необQ ходимости иметь объем гидрокамеры 28, равный объему рабочей жидкости, вытесняемой из рабочих полостей 2 или 3 исполнительного гидроцилиндра 1.
При этом существенно снижается металлоемкость и стоимость пневмогидравличес5 кого цифрового преобразователя, так как при больщих объемах рабочих полостей исполнительного гидроцилиндра объем рабочей жидкости в гидрокамере пневмогидравлического цифрового преобразователя может составлять лищь его незначительную часть.
Предложенный позиционный привод по сравнению с известным приводом снижает энергозатраты на 24%. Введение в схему демпфирующего устройства повыщает срок службы и быстродействие за счет снижения вибрации и пульсации рабочей жидкости. Снабжение привода управляющим устройством позволяет в наладочном режиме отрегулировать величину рабочих ходов щто10218274
- -гт,сГ.еГГ г„о«°; L° ± p t°-o; -;s
иал11чии только одного пневмогидравли-дискретностью его младшего разряда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906665A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906664A1 |
| Установка для деформирования трубчатых заготовок | 1982 |
|
SU1065061A1 |
| Пневмогидравлический позиционныйпРиВОд | 1979 |
|
SU795869A1 |
| Система синхронизации скорости поршней силовых цилиндров | 1979 |
|
SU770741A1 |
| Пневмогидравлический позицион-Ный пРиВОд | 1979 |
|
SU795870A1 |
| Пневмогидравлический позиционный привод | 1984 |
|
SU1186838A1 |
| Пневмогидравлический привод много-МЕСТНыХ зАжиМНыХ пРиСпОСОблЕНий TEXHO-лОгичЕСКОгО ОбОРудОВАНия | 1979 |
|
SU795865A2 |
| Установка для формования полых оболочек (ее варианты) | 1982 |
|
SU1101312A1 |
| Гидропривод | 1974 |
|
SU471817A1 |
1. ПНЕВМОГИДРАВЛИЧЕСКИЙ ЦИФРОВОЙ ПОЗИЦИОННЫЙ ПРИВОД, содержащий исполнительный гидроцилиндр с рабочими полостями, пневмоприводной насос, пневмогидравлический цифровой преобразователь, включающий цифровой пневмоцилиндр с выходным штоком и гидрокамеру с установленным в нем поршнем, жестко связанным со штоком пневмоцилиндра с образованием поршневой и штоковой полостей, четырехлинейный распределитель, сливная линия которого связана через обратный клапан с порщневой полостью гидрокамеры, и компенсационную емкость, отличающийся тем, что, с целью расширения функциональных возможностей привод снабжен управляющим устройством, вход которого связан со сливной линией распределителя, а выход - с компенсационной емкостью. 2.Привод по п. 1, отличающийся тем, что управляющее устройство выполнено в виде регулируемого дросселя. 3.Привод по пп. 1 и 2, отличающийся тем, что управляющее устройство выполнено в виде дозатора, а привод снабжен демпфирующим устройством. 4.Привод по п. 3, отличающийся тем, что демпфирующее устройство выполнено в виде регулятора потока с исполнитель(Л ным элементом, установленным с возможностью взаимодействия со штоком пневмоцИлиндра, дополнительно снабженным копиром, причем вход регулятора потока связан со штоковой полостью гидрокамеры, а выход - с компенсационной емкостью.
L
Фм.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 2990452/27-08, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
