4
ю
оо to -vj
Изобретение относится к электротехнике и может быть использовано при управлении электродвигателями.
Цель изобретения - повьшение точности и уменьшение перерегулирования системы.
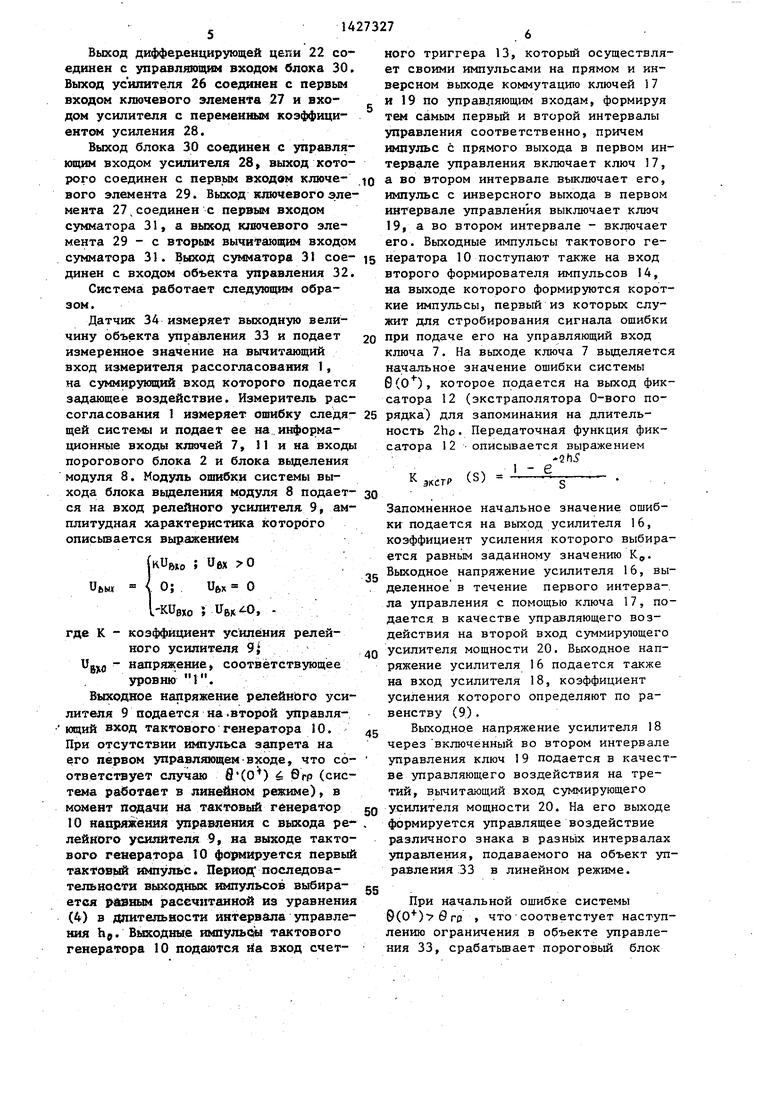
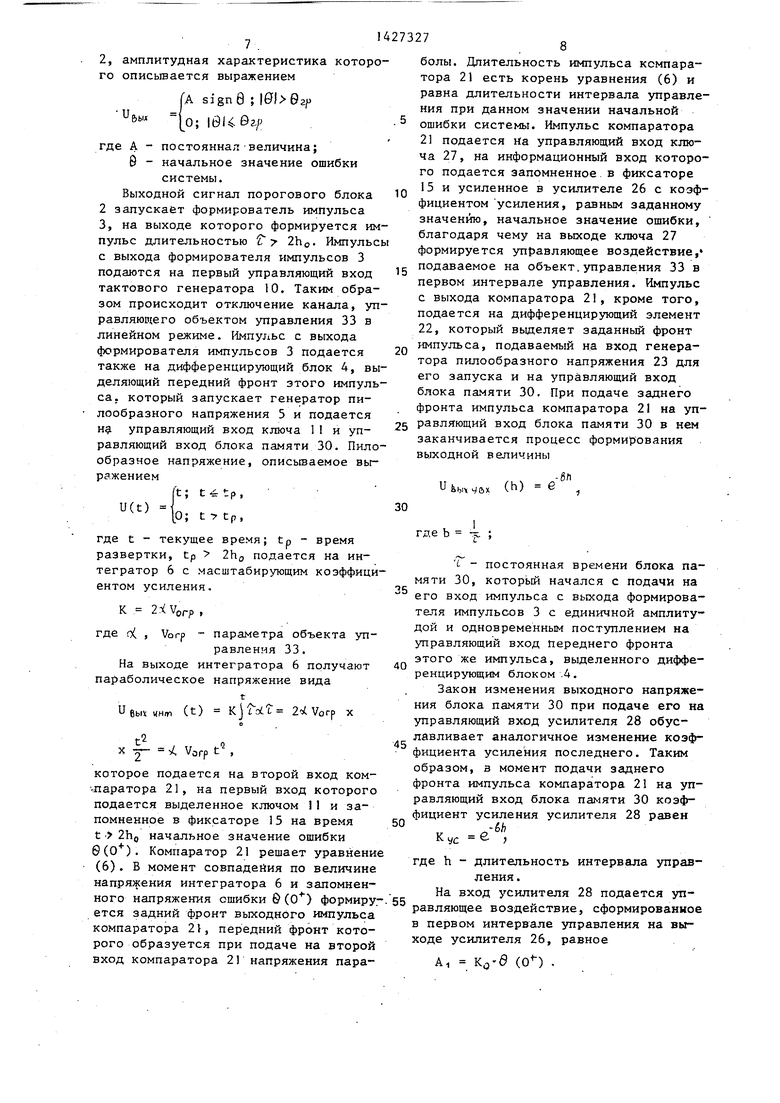
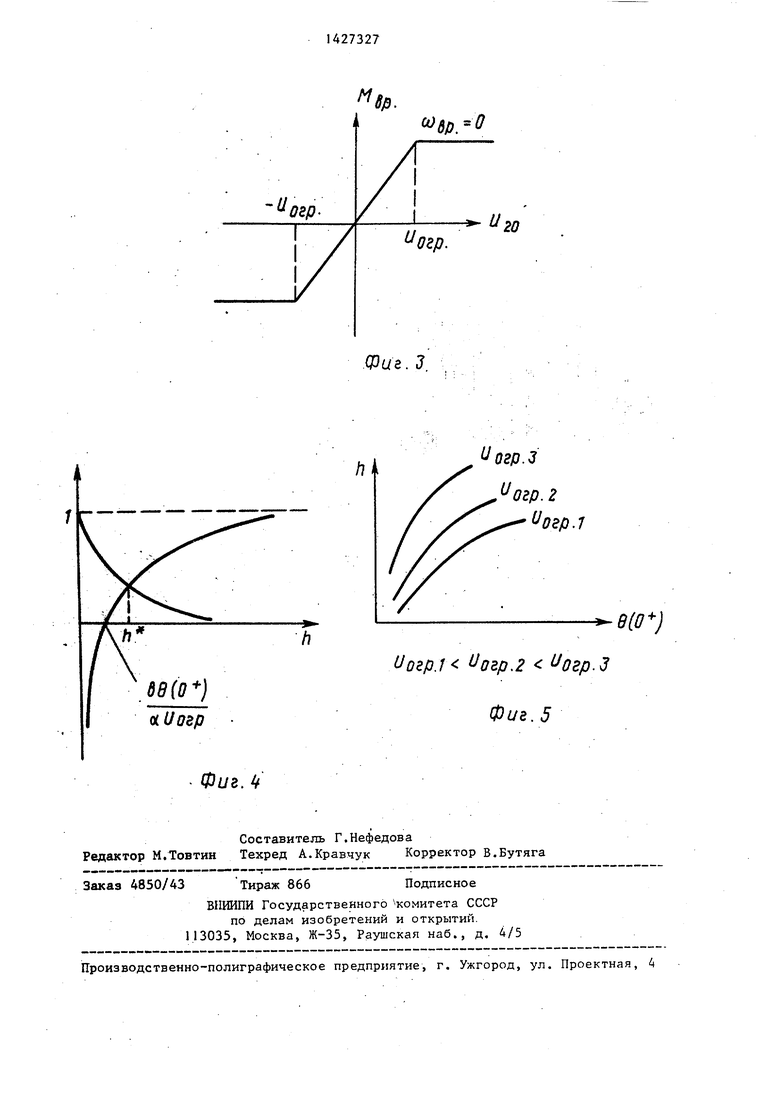
На фиг.i приведена функциональная. схема системыJ на фиг. 2 эпюры сигналов, иллюстрирующих работу системы; на фиг.З - регулировочная характеристика для момента вращения Объекта управления при oDft 0; на фиг. 4и5- графики, иллюстрирующие способ нахождения длительности интервзкла управления Ьц при работе следяоцей системы в линейное режиме и зави:с{04ость интервала h от величины ошибки системы 8 и уровия ограничения Vorp объекта управления в нелинейном режим :.
Система содержит измеритель рассогласования I, пороговый блок 2, первый формирователь импульсов 3, дифференцирующий блок А( перв генератор пилообразного напряжения 5, первый интегратор б, первый ключ 7, блок выделения модуля 8, релейный усилитель 9, тактовый генератор 10, второй ключ 11, первый фиксатор (экстраполя- тор 0-вого порядка) 12, счетный триггер 13, второй формирователь импульсов 14, второй фиксатор 15, первый усилитель 16, третий ключ 17, второй усилитель 18, четвертый ключ 19, суммирующий усилитель йснцности 20, первый компаратор 21, дифференцирующий блок 22, второй генератор пилообразного напряжения 23, второй интегратор 24, второй компаратор 25, третий усилитель 26, пятый ключ 27, четвертый усилитель 28, шестой ключ 29, блок паг мяти 30, сумматор 31, исполнительный мехаиизм 32, объект управления 33, датчик 34, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 35, делитель частоты 36, задатчик 37, Щ-выходной сигнал i-oro блока системы, и, Чд - сигналы йа прямом и инверсном выходах счетного триггера 13, МЬР - момент вращения вала исполнительного механизма 32, 8 - ошибка системы, h - длительность интервала уп- . равления, оС и f масштабные коэффициенты, V огр уровень ограничения объекта управления 33-по входу.
В качестве объектов управления мог гут выступать двигатели постоянного тока, асинхронные двигатели и т.д.
Согласно фиг.1 измеряют.выходную величину объек та управления 33, сравнивают ее с задающим воздействием в виде ступенчатой функции величиной Ae l(t), определяют ошибку системы б. Затем формируют два интервала управления, длительность которых h равна
, Т h Y 1
(1)
Тде Т - искомое время регулирования.
Длительность интервалов управления определяют в зависимости от величины ошибки. Вначале производят сравнение начальной ошибки системы 0 (О) с величиной 0ПР, определяемой по формуле.
л V орр
Ко
(2)
где Vorp - уровень ограничения объекта управления 33 по входу (фиг.З);
Ко - заданный коэффициент усиления разомкнутой системы,
и
равный Кр -g , и Vorp ;
и - выходное напряжение объекта управления 33; О - ошибка системы. Если 6 (0) 0 гр то управление .объектом управления 33 происходит на линейном участке его регулировочной характеристики.
При этом принимая во внимание, что при управлении объектом управления 33 второго порядка, передаточная функция KOTopoi;o описывается выражением
40
G(S)
S(S b)
где оС и b - коэффициенты;
S - оператор Лопласа, величина Ко выражается через длительность интервалов управценкя h с помощью формулы
к
° оСъ(
(3)
где оС, b - параметры динамического
объекта управления 33; h - величина, соответствующая работе системы в линейном режиме, определяв ется из трансцендентного уравнения
. . b
1 oChKo
(4)
которое решается либо графически (фиг.4), либо методом последовательных приближений. Из уравнений видно, что при 6 (О) бгр величина h не зависит от величины ошибки.
При наступлении ограничения в объекте управления 33(8 (0)7 6 гр) величину h находят из уравнения
1 b 9 (О )
oih Vorp
(5)
В этом случае h есть функция от начальной ошибки Q (О) при данном Vorp, как показано графически на блг.З. Поэтому в процессе управления при Q (0)Q|ip интервал h должен постоянно вычисляться в зависимости от начальной ошибки S (О),
Уравнение (5) ввиду сложности аппаратурной реализации определения h может быть упрощено, если допустить, что его правая часть представляет собой первые два члена разложения
л -
6
1 - X +
X
IT
xi ЗТ
при X - 1.
Для уравнения если
(5) это справедливо
V,
ОРР
V
0 (0)
а практических слу
Тогда уравнение (5) примет вид -«/1 „-Ьв(О)
oL h Uorp
0
g
тех же.параметрах объекта и 8 3 В погрешность не превьш1ает 1,55%.
После этого запоминают начальное значение ошибки б (О) в первом интервале управления. Запомненную ошибку умножают на первую задайную величину Ко и подают на объект управления 33 произведение, равное
А, Ко -0(0),
обеспечивая разгон объекта в первом интервале управления.
Для получения переходного процесса без перерегулирования необходимо во втором интервале управления вновь измерить ошибку системы, соответствую- щую началу интервала, равную.
-eh
0 e(h)
1 X АО
- (bh-1 + e
l(t).
)Ко
запомнить ее на длительность интервала, умножить ее на величину К«, равную
Кд
(bh) ,oth2 iT-e- (H-bh)j
Полученное произведение равно
,-W
А К,- e(h)
А.-е-
b е о(.ь(-е-Щ
(7)
35 Как следует из выражения (7), достаточно во втором интервале запомнить величину управляющего воздействия А., подаваемого на объект управ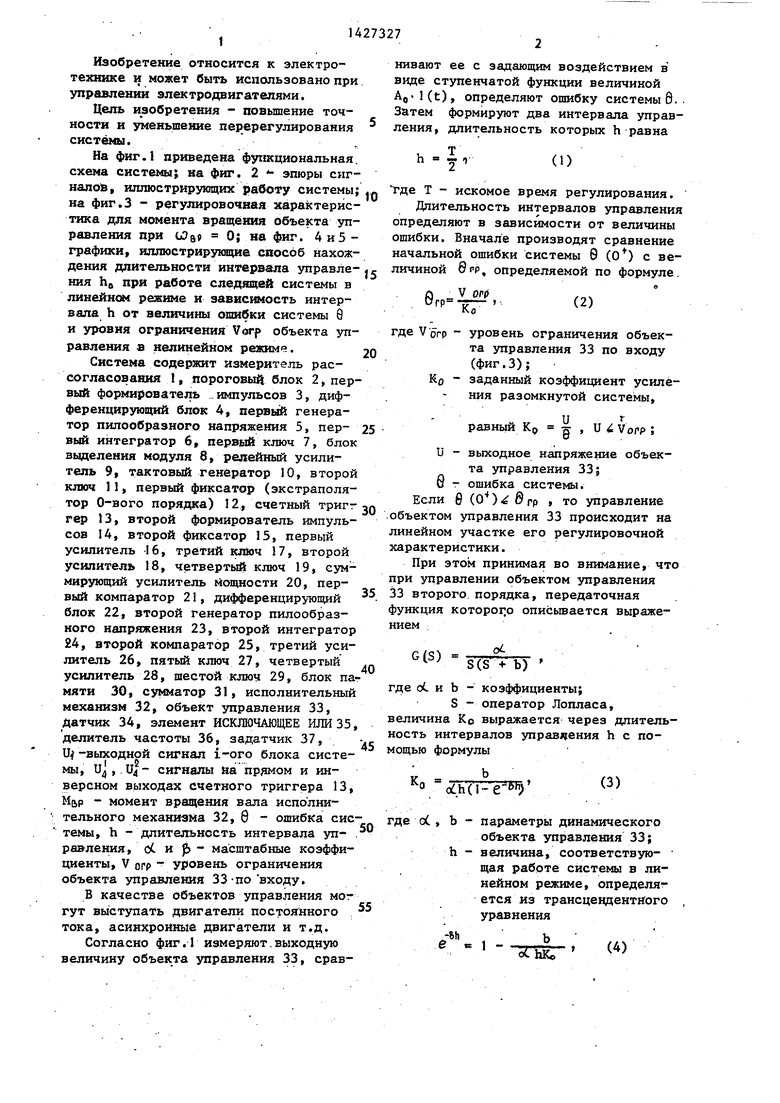
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения времени установления цифроаналогового преобразователя | 1986 |
|
SU1432776A1 |
| Устройство для измерения нелинейности пилообразного напряжения | 1990 |
|
SU1777101A1 |
| Аналого-цифровой частотомер | 1988 |
|
SU1712894A1 |
| Устройство для формирования напряжения,пропорционального логарифму интервала времени | 1981 |
|
SU1013869A1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕННОЙ ВЕЛИЧИНЫ | 2010 |
|
RU2437064C1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1601728A1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОДПОВЕРХНОСТНЫХ СЛОЕВ ПОЧВЫ | 1997 |
|
RU2154845C2 |
| Устройство для цифрового измерения частоты | 1989 |
|
SU1666965A2 |
| Устройство для моделированияСТАТичЕСКОгО МАгНиТНОгО пОля | 1979 |
|
SU805356A1 |
| Измеритель коэффициента нелинейности пилообразного напряжения | 1980 |
|
SU894607A1 |

Изобретение относится к электротехнике и может быть использовано для управления электрическими двигателями. Целью изобретения является повышение точности и уменьшение перерегулирования системы. Эта цель достигается тем, что в отличие от релейного закона управления применяется та- кое управление, при котором длительности формируемых интервалов управления равны между собой, величина управляемого воздействия на интервале - торможения в общем случае меньше или равна величине управляющего воздействия на интервале разгона, причем длительности интервалов являются функцией начальной ошибки следящей системы и уровня ограничения объекта управления. Это обеспечивается тем, что ощиб- ка следящей системы измеряется в момент подачи задающего действия, запоминается, подается на устройство формирования интервалов управления, длительность которых определяется в зависимости от величины запомненной § ошибки, перемножается в каждом интервале на соответствующее заданное число и результат подается с противоположными знаками в различных интерва- лах управления на объект, обеспечивая5 переходный процесс без перерегулирования. 5 ил. сл
или же
h
6(0) «i.V огр h
В результате получим соотношение
h 0(0)
Vorp
mQ(0),
где m - козффициент пропорциональности. .
Положительным корнем уравнения (6) и будет искомая длительность h интервала управления. При сЬответств:1тощем выборе параметров объекта управления 33 можно получить удовлетворительную T04HodTb вычисления h.Так,при Vorp 300 В; ot 10; b 2с ; fl lO bj относительная .погрешность вычисления h по уравнению (6) по сравнению с уравнением (5) составляет 2,9%, при
ления 33 в первом интервале и умно- 40 жить ее на величину С, равную в общем случае
-6Л
(8)
jg зависящую от длительности интервала h, а значит, и от начального значения ошибки системы В (). В линейном режиме величина С будет равна
50
,
при любых в (0) 0ГР
(У)
Полученное из выражения (7) произведение А. подают с обратным знаком 55 на объект управления 33, обеспечивая его торможение во втором интервале , управления. В результате в конце вто- рого интервала управления ошибка системы должна стать равной нулю.
Выход дифференцирующей цепи 22 соединен с улравлякшщм входом блока 30. Выход усилителя 26 соединен с первым входом ключевого элемента 27 и входом усилителя с переменным коэффициентом усиления 28.
Выход блока 30 соединен с управляющим входом усилителя 28 выход которого соединен с первым входом ключевого элемента 29. Выход ключевого элемента 27,соединен с первым входом сумматора 31, а выход ключевого элемента 29 - с вторым вычитающим входом
сумматора 31. Выход сумматора 31 сое- 15 нератора 10 поступают также на вход
динен с входом объекта управления 32.
Система работает следующим образом.
Датчик 34 измеряет выходную величину объекта управления 33 и подает измеренное значение на вычитающий вход измерителя рассогласования 1, на суммирующий вход которого подается задающее воздействие. Измеритель расвторого формирователя импульсов 14, на выходе которого формируются короткие импульсы, первый из которых служит для стробирования сигнала ошибки 20 при подаче его на управляющий вход ключа 7. На вьксде ключа 7 вьщеляется начальное значение ошибки системы 0(0), которое подается на выход фиксатора 12 (экстраполятора О-вого по- согласования 1 измеряет ошибку следя- 25 рядка) для запоминания на длитель- щей системы и подает ее на., информа- ность 2ho. Передаточная функция фик- ционные входы ключей 7, 11 и на входы сатора 12 порогового блока 2 и блока выделения модуля 8. Модуль ошибки системы вы- к хода блока вьщеле1шя модуля 8 подает- зо ся на вход релейного усилителя 9, амЭКСТР
описывается выражением -2h
(S) - . . .
Запомненное начальное значение ошибки подается на выход усилителя 16, коэффициент усиления которого выбира ется равнь1м заданному значению К,. 2g Выходное напряжение усилителя 16, вы . деленное в течение первого интервала управления с помощью ключа 17, по дается в качестве управляющего воздействия на второй вход суммирующего усилителя мощности 20. Вьсходное напряжение усилителя 16 подается также на вход усилителя 18, коэффициент усиления которого определяют по равенству (9) .
плитудная характеристика которого описьгаается выражением
JKUftno ; Uex 0 UbbiJT { О; Ufcx О
KUexo ; , где К - коэффициент усиления релейного усилителя 9
напряжение соответствующее
уровню 1.
Выходное напряжение релейньго усилителя 9 подается на .второй управля- ющий вход тактового генератора 10. При отсутствии импульса запрета на его первом управляющем входе, что соответствует случаю Й (оЪ 0fp (система работает в ливе)ом режиме), в момент пояачи на тактовый генератор 10 напряжения управления с выхода релейного усилителя 9, на выходе тактового геаератора 10 формируется первый тактовый импульс. Период последовательности выходных штульсов выбирается рлвным рассчитанной из уравнения (4) в датительяости интервала управления hj. Выходные импулыда тактового генератора 10 подаются tia вход счет
ного триггера 13, который осуществляет своими импульсами на прямом и инверсном выходе коммутацию ключей 17 и 19 по управляющим входам, формируя тем самым первьш и второй интервалы управления соответственно, причем импульс с прямого выхода в первом интервале управления включает ключ 17, а во втором интервале выключает его, импульс с инверсного выхода в первом интервале управления выключает ключ 19, а во втором интервале - включает его. Выходные импульсы тактового гевторого формирователя импульсов 14, на выходе которого формируются короткие импульсы, первый из которых служит для стробирования сигнала ошибки при подаче его на управляющий вход ключа 7. На вьксде ключа 7 вьщеляется начальное значение ошибки системы 0(0), которое подается на выход фика 12 (экстраполятора О-вого п ) для запоминания на длитель- 2ho. Передаточная функция фи а 12
ЭКСТР
описывается выражением -2h
(S) - . . .
сатора 12 (экстраполятора О-вого по- рядка) для запоминания на длитель- ность 2ho. Передаточная функция фик- сатора 12 к
Запомненное начальное значение ошибки подается на выход усилителя 16, коэффициент усиления которого выбирается равнь1м заданному значению К,. Выходное напряжение усилителя 16, вы- деленное в течение первого интерва. ла управления с помощью ключа 17, подается в качестве управляющего воздействия на второй вход суммирующего усилителя мощности 20. Вьсходное напряжение усилителя 16 подается также на вход усилителя 18, коэффициент усиления которого определяют по равенству (9) .
Выходное напряжение усилителя 18 через включенный во втором интервале управления ключ 19 подается в качестве управляющего воздействия на третий, вычитающий вход суммирующего усилителя мощности 20. На его выходе формируется управлящее воздействие различного знака в разных интервалах управления, подаваемого на объект управления 33 в линейном режиме.
55
При начальной ошибке системы 0(0) 7 0 го что соответстует наступлению ограничения в объекте управления 33, срабатьшает пороговый блок
2, амплитудная характеристика которого описьшается выражением
-и
бьи
ГА sign6 ; (о; |0и0г-/
где А - постояннал-величина;
S - начальное значение ошибки
системы.
Выходной сигнал порогового блока 2 запускает формирователь импульса 3, на выходе которого формируется импульс длительностью 2ho. Импульсы с выхода формирователя импульсов 3 подаются на первый управляющий вход тактового генератора 10. Таким образом происходит отключение канала, уп- равляюп;его объектом управления 33 в линейном режиме. Г-Ыпульс с выхода формирователя импульсов 3 подается также на дифференцирующий блок 4, выделяющий передний фронт этого импульса, который запускает генератор пилообразного напряжения 5 и подается н управляющий вход ключа 1I и управляющий вход блока памяти 30. Пилообразное напряжение, описываемое выражением
ft; ,
По; .-Р.
где t - текущее время; tp - время развертки, tp подается на интегратор 6 с масштабирующим коэффициентом усиления.
К 23(Vorp ,
где о( I Vorp - параметра объекта управления 33.
На выходе интегратора 6 получают параболическое напряжение вида
t UfibrvwH (t) KJfoit 2 Vorp X
X J- Vorp t ,
которое подается на второй вход ком- шаратора 21, на первый вход которого подается выделенное ключом 11 и запомненное в фиксаторе 15 на время t 2h(, начальное значение ошибки 6(). Компаратор 21 решает уравнение (6). В момент совпадейия по величине напряжения интегратора 6 и запомненного напряжения ошибки & (0) формируется задний фронт выходного импульса компаратора 21, передний фронт которого образуется при подаче на второй вход компаратора 2 напряжения пара
болы. Длительность импульса компаратора 21 есть корень уравнения (6) и равна длительности интервала управления при данном значении начальной ошибки системы. Импульс компаратора 21 подается На управляющий вход ключа 27, на информационный вход которого подается запомненное, в фиксаторе I5 и усиленное в усилителе 26 с коэффициентом усиления, равным заданному значению, начальное значение ошибки, благодаря чему на выходе ключа 27 формируется управляющее воздействие,
подаваемое на объект.управления 33 в первом интервале управления. Импульс с выхода компаратора 21, кроме того, подается на дифференцирующий элемент 22, который выделяет заданный фронт импульса, подаваемый на вход генератора пилообразного напряжения 23 для его запуска и на управляющий вход блока памяти 30, При подаче заднего фронта импульса компаратора 21 на управляющий вход блока памяти 30 в нем заканчивается процесс формирования выходной величины
Ubb-t
Ч/ЙХ
(h) е
-бп
30
0
5
0 5
где Ъ J. ;
L - постоянная времени блока памяти 30, которьм начался с подачи на его вход импульса с выхода формирователя импульсов 3 с единичной амплитудой и одновременным поступлением на управляющий вход переднего фронта этого же импульса, выделенного дифференцирующим блоком .4.
Закон изменения выходного напряжения блока памяти 30 при подаче его на управляющий вход усилителя 28 обуславливает аналогичное изменение коэффициента усиления последнего. Таким образом, в момент подачи заднего фронта импульса компаратора 21 на управляющий вход блока памяти 30 коэффициент усиления усилителя 28 равен -6h
К ус - }
где h - длительность интервала управления .
На вход усилителя 28 подается управляющее воздействие, сформированное в первом интервале управления на выходе усилителя 26, равное
А, Ко-а (0) .
с выхода апряжение,
9
усилителя равное
1427327
28 постоянное
в ч п х к н в к в л в в и 20 р в в
.,-&П
В (о)е
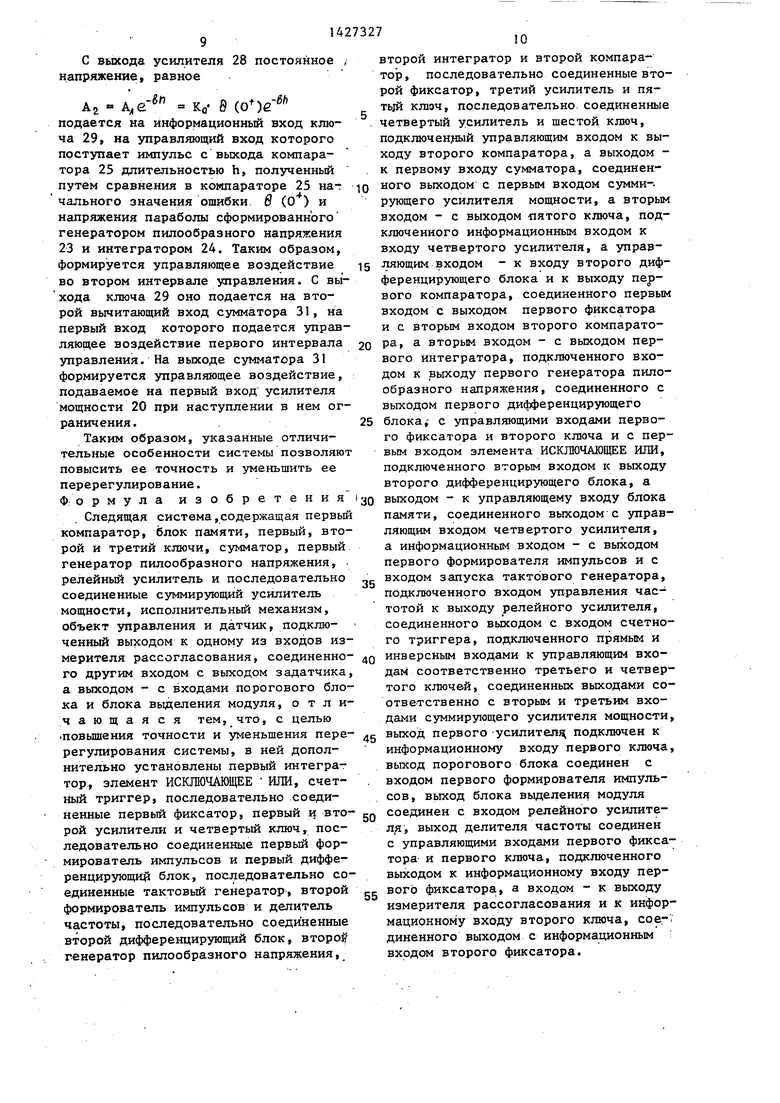
Аг в KOподается на информационный вход ключа 29, на управляющий вход которого поступает импульс с выхода компаратора 25 длительностью h, полученный путем сравнения в компараторе 25 начального значения ошибки в (О) и напряжения параболы сформированного генератором пилообразного напряжения 23 и интегратором 24. Таким образом, формируется управляющее воздействие во втором интервале управления. С выхода ключа 29 оно подается на второй вычитающий вход сумматора 31, на первый вход которого подается управляющее воздействие первого интервала управления. На выходе сумматора 31 формируется управляющее воздействие, подаваемое на первый вход усилителя Мощности 20 при наступлении в нем ограничения.
Таким образом, указанные отличительные особенности системы позволяют повысить ее точность и уменьшить ее Перерегулирование. Формула изобретения
Следящая система,содержащая первьй компаратор, блок памяти, первый, второй и третий ключи, сумматор, первый генератор пилообразного напряжения, релейный усилитель и последовательно соединенные суммирующий усилитель мощности, исполнительный механизм, объект управления и датчик, подключенный выходом к одному из входов измерителя рассогласования, соединенного другим входом с выходом задатчика а выходом - с входами порогового блока и блока вьоделения модуля, отличающаяся тем, что, с целью повышения точности и уменьшения перерегулирования системы, в ней дополнительно установлены первый интеграг тор, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, счет- ный триггер, последовательно соединенные первый фиксатор, первый ц вто- рой усилители и четвертый ключ, последовательно соединенные первый формирователь импульсов и первый дифференцирующий блок, последовательно соединенные тактовый генератор, второй формирователь импульсов и делитель частоты, последовательно соединенные второй дифференцирующий блок, второй генератор пилообразного напряжения.
10
5
5
0
. Q
второй интегратор и второй компаратор, последовательно соединенные второй фиксатор, третий усилитель и пя- ть;й ключ, последовательно, соединенные четвертый усилитель и шестой ключ, подключенный управляющим входом к выходу второго компаратора, а выходом - к первому входу сумматора, соединенного выходом с первым входом сумми-. рующего усилителя мощности, а вторым входом - с выходом лятого ключа, подключенного информационным входом к входу четвертого усилителя, а управляющим входом - к входу второго дифференцирующего блока и к выходу первого компаратора, соединенного первым входом с выходом первого фиксатора и с вторым входом второго компарато- 0 ра, а вторым входом - с выходом первого интегратора, подключенного входом к выходу первого генератора пилообразного напряжения, соединенного с вьпсодом первого дифференцирующего блока,- с управляющими входами первого фиксатора и второго ключа и с первым входом элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, подключенного вторым входом к выходу второго дифференцирующего блока, а выходом - к управляющему входу блока памяти, соединенного выходом с управляющим входом четвертого усилителя, а информационным входом - с выходом первого формирователя импульсов и с входом запуска тактового генератора, подключенного входом управления частотой к выходу релейного усилителя, соединенного выходом с входом счетного триггера, подключенного прямым и инверсным входами к управляющим входам соответственно третьего и четвертого ключей, соединенных вькодами соответственно с вторым и третьим входами суммирующего усилителя мощности, выход первого усилителя подключен к информационному входу первого ключа, вьпсод порогового блока соединен с входом первого формирователя импульсов, выход блока вьщеления модуля соединен с входом релейного усилителя, выход делителя частоты соединен с управляющими входами первого фиксатора и первого ключа, подключенного выходом к информационному входу первого фиксатора, а входом - к выходу измерителя рассогласования и к информационному входу второго ключа, сое-/ диненного выходом с информационным входом второго фиксатора.
5
0
5
5
оер.
oiUosp
вр.
и
и
OZp.
20
Фиг. 3
h
огр.з
BiO)
(огр.1 ozp,2 oep.J Фиг. 5
| Павлов А.А | |||
| Синтез релейных систем, оптимальных по быстродействию | |||
| М., 1966, с.73-88 | |||
| Электрогидравлический следящий привод | 1977 |
|
SU652530A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Электрогидравлический следящий привод | 1982 |
|
SU1049863A2 |
