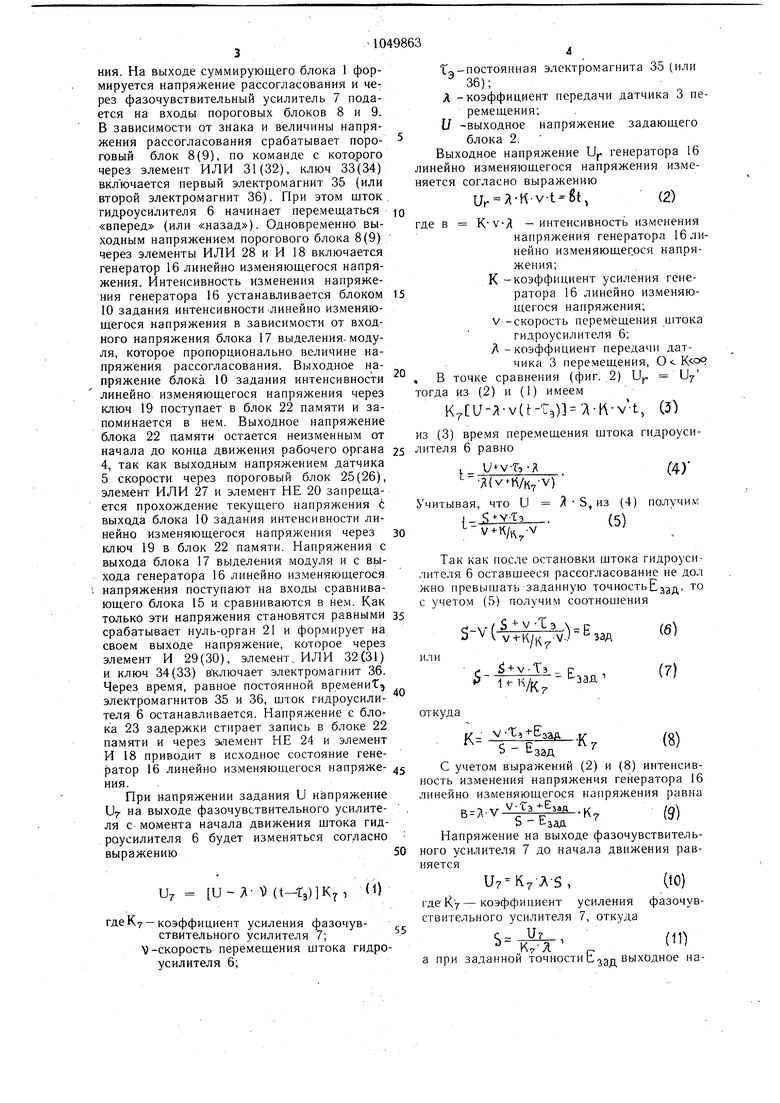
Изобретение относится к автоматике и предназначено для использования в системах автоматического управления перемещением рабочих органов промышленных механизмов, например в системах управления функциональными узлами промышленных тракторов. По основному авт. св. № 732805 известен электрогидравлический следяший при вод, содёржаш,ий первый и второй электромагниты, .механически соединенные через гид роусилитель с рабочим органом и датчиком перемеш,ения, суммирующий блок, первый вход которого подключен к выходу задающего блока, второй вход - к выходу датчика перемещения, а выход через фазочувствительныи усилитель - к входам первого и второго пороговых блоков, выход первого порогового блока соединен с первыми входами первого и второго элементов ИЛИ и первого элемента И, выход второго порогового блока соединен с вторыми входами первого элемента ИЛИ и первы.ми входами третьего элемента ИЛИ и второго элемента И, вторые входы второго и третьего элементов ИЛИ соединены соответственно с выходами второго и первого элементов И, выход второго элемента ИЛИ подсоединен через первый ключ к входу первого электромагнита, а выход третьего элемента ИЛИ через второй ключ - к входу второго электромагнита, генератор линейно изменяющегося напряжения, блок задания интенсивности линейно изменяюшегося напряжения, нуль-орган и сравнивающий блок, первый вход которого соединен с выходом генератора линейно изменяюшегося напряжения, второй вход - с выходом фазочувствительного усилителя и через блок задания интенсивности изменения линейно изменяющегося напряжения - с/первым входом генератора линейно изменяющегося напряжения, второй вход которого подключен х выходу первого эле.мента ИЛИ, а выход сравнивающего блока соединен через нульорган с вторыми входами первого и второго элементов И 1. Недостатками известного привода являются его низкая динамическая точность и малое быстродействие. Цель изобретения - повыщение динамической точности и быстродействия привода. Поставленная цель достигается тем, что в приводе дополнительно установлены датчик скорости, третий и четвертый пороговые блоки, четвертый элемент ИЛИ, первый и второй элементы НЕ, третий элемент И, блок задержки, блок выделения модуля, третий .ключ и блок памяти, причем выход cf)aзочувствительного усилителя соединен с вторым входом сравнивающего блока и с входом блока задания интенсивности изменения линейно изменяющегося напряжения через блок выделения модуля, выход блока задания интенсивности изменения линейно изменяющегося напряжения соединен с первым входом генератора линейно изменяющегося напряжения через последовательно соединенные третий ключ и блок памяти, выход первого элемента ИЛИ соединен с вторым входом генератора, линейно изменяющегося напряжения через третий элемент И, выход нуль органа через блок задержки соединен с управляющим входом блока памяти и с входом второго элемента НЕ, подключенного выходом к второму входу третьего элемента И, вход датчика скорости соединен с выходо.м гидроусилителя, а выход - с входами третьего и четвертого пороговых блоков, подключенных выходами к соответствующим входам четвертого элемента ИЛИ, подключенного выходом через первый элемент НЕ к управляющему входу третьего ключа. На фиг. 1 представлена функциональная схема привода; на фиг. 2 - временные диаграммы, поясняющие работу устройства. Привод содержит су.ммирующий блок 1, задающий блок 2, датчик 3 перемещения, рабочий орган 4, датчик 5 скорости, гидроусилитель 6, фазочувствительный усилитель 7, первый и второй пороговые блоки 8 и 9, блок 10 задания интенсивности линейно изменяющегося напряжения, сумматор 11, делитель 12, первый и второй источники 13 и 14 постоянного напряжения, сравнивающий блок 15, генератор 16 линейно изменяющегося напряжения, блок 17 выделения модуля, третий элемент И 18, третий ключ 19, первый элемент НЕ 20, нуль-орган 21, блок 22 памяти, блок 23 задержки, второй элемент НЕ 24, третий и четвертый пороговые блоки 25 и 26, четвертый элемент ИЛИ 27, первый элемент ИЛИ 28, первый и второй элементы И 29 и 30, второй и третий элементы ИЛИ 31 и 32, первый и второй ключи 33 и 34, первый и второй электромагниты 35 и 36. Максимальное напряжение на выходе генератора 16 линейно изменяющегося напряжения - равно Uivi .Я SM, где S, - максимальное перемещение штока гидроусилителя 6; Я - коэффициент передачи датчика 3 перемещения. и 7(S - текущее напряжение задания на выходе задающего блока 2, LV - текущее значение напряжения на выходе генератора 16 линейно изменяющегося напряжения. Ключи 33 и 34 выполняют роль ключевых усилителей мощности. В качестве усилителей мощности могут .быть применены также релейные усилители. Привод работает следующим образом. Напряжение задания формируется в блоке 2 и подается на вход суммирующего блока 1, на второй вход которого подается напряжение с выхода датчика 3 перемещения. На выходе суммирующего блока 1 формируется напряжение рассогласования и через фазочувствительный усилитель 7 подается на входы пороговых блоков 8 и 9. В зависимости от знака и величины напряжения рассогласования срабатывает пороговый блок 8(9), по команлче с которого через элемент ИЛИ 31(32), ключ 33(34) включается первый электромагнит 35 (или второй электромагнит 36). При этом шток гидроусилителя 6 начинает перемещаться «вперед (или «назад). Одновременно выходным напряжением порогового блока 8(9) через элементы ИЛИ 28 и И 18 включается генератор 16 линейно изменяющегося напряжения. Интенсивность изменения напряжения генератора 16 устанавливается блоком 10 задания интенсивности-линейно изменяющегося напряжения в зависимости от входного напряжения блока 17 выделения, модуля, которое пропорционально величине напряжения рассогласования. Выходное напряжение блока 10 задания интенсивности линейно изменяющегося напряжения через ключ 19 поступает в блок 22 памяти и запоминается в нем. Выходное напряжение блока 22 аамяти остается неизменным от начала до конца движения рабочего органа 4, так как выходным напряжением датчика 5 скорости через пороговый блок 25(26), элемент ИЛИ 27 и элемент НЕ 20 запрещается прохождение текущего напряжения i выхода блока 10 задания интенсивности линейно изменяющегося напряжения через ключ 19 в блок 22 памяти. Напряжения с выхода блока 17 выделения модуля и с выхода генератора 16 линейно изменяющегося напряжения поступают на входы сравнивающего блока 15 и сравниваются в не.м. Как только эти напряжения становятся равными срабатывает нуль-орган 21 и формирует на своем выходе напряжение, которое через элемент И 29(30), элемент. ИЛИ 32(31) и ключ 34(33) включает электро.магнит 36. Через время, равное постоянной времениТ электромагнитов 35 и 36, щток гидроусилителя 6 останавливается. Напряжение с блока 23 задержки стирает запись в блоке 22 памяти и через эьтемент НЕ 24 и элемент И 18 приводит в исходное состояние генератор 16 линейно изменяющегося напряжения. При напряжении задания U напряжение U7 на выходе фазочувствительного усилителя с момента начала движения щтока гидроусилителя 6 будет изменяться согласно выражению Uy U- Д (t-Тз)К71 0 гдеКу-коэффициент усиления фазочувствительного усилителя 7; V-скорость перемещения щтока гидроусилителя 6; Tq-постоянная электромагнита 35 (или 36); А -коэффициент передачи датчика 3 ремещения; и -выходное напряжение задающего блока 2. ыходное напряжение U. генератора 16 йно изменяющегося напряжения измеся согласно выражению Ur -K-v-t gt,(2) в KV-Л -интенсивность изменения напряжения генератора 16 линейно изменяющегося напряжения;К -коэффициент усиления генератора 16 линейно изменяющегося напряжения; V -скорость перемещения щтока гидроусилителя 6; Л - коэффициент передачи датчика 3 перемещения, точке сравнения (фиг. 2) U Uy а из (2) и (1) имеем K7CU-Лv(t-tэ)ЛKvt, (Я 3) время пере.мещения щтока гидроусиля 6 равно Д(у П/к/У) ывая, что U S, из (4) получим J- $ V-t3 Так как после остановки штока гидроусиеля 6 оставшееся рассогласование не дол превышать заданную точностьЕ д, то етом (5) получим соотношения C-V( О V + уТэ зад учетом выражений (2) и (8) интенсивь изменения напряжения генератора 16 йно изменяющегося напряжения равна У-сз- Езад ., B yl-V| 7S ЕЗЗД апряжение на выходе фазочувствительусилителя 7 до начала движения равсяиг-К/ЛЗ,(to) Ку - коэффициент усиления фазочувтельного усилителя 7, откуда , и заданной точности выходное напряжение фазочувствительного усилителя 7 равно Д Uy Kr jj OTKyjua Г ДУг(iO ззд-к-t- 2 с учетом (И) и (12) выражение (9) запишется в виде р У-Я(У-€э- Ёзад)К7/„л () Для каждого конкретного привода v const, Д const, Гэ const, Eiam const, тогда выражение (13) примет вид ирдй, .) где с K7-V -Л (Vt3 Ч-Езад) const Таким образом, в предлагаемом приводе любое напряжение задания будет отрабатывать ся с максимальной скоростью и с заданной точностью при соблюдении условия (14). Условие (14) реал1 зуется блоком 10 задания интенсивности линейно изменяющегося напряжения, в котором в сумматоре 11 на пряжение с выхода блока 17 выделения модуля, равное абсолютной величине напряжения Uy, алгебраически суммируется с постоянным по величине напряжением, равным ди7 и задаваемым источником 13 постоянного напряжения. Постоянное напряжение, равное С и задаваемое источником 14 постоянного напряжения, делится в делителе 12 на напряжение, пропорциональное разности UY - А-и. Изобретение позволяет повысить точность и быстродействие следящего привода примерно в два С половиной раза.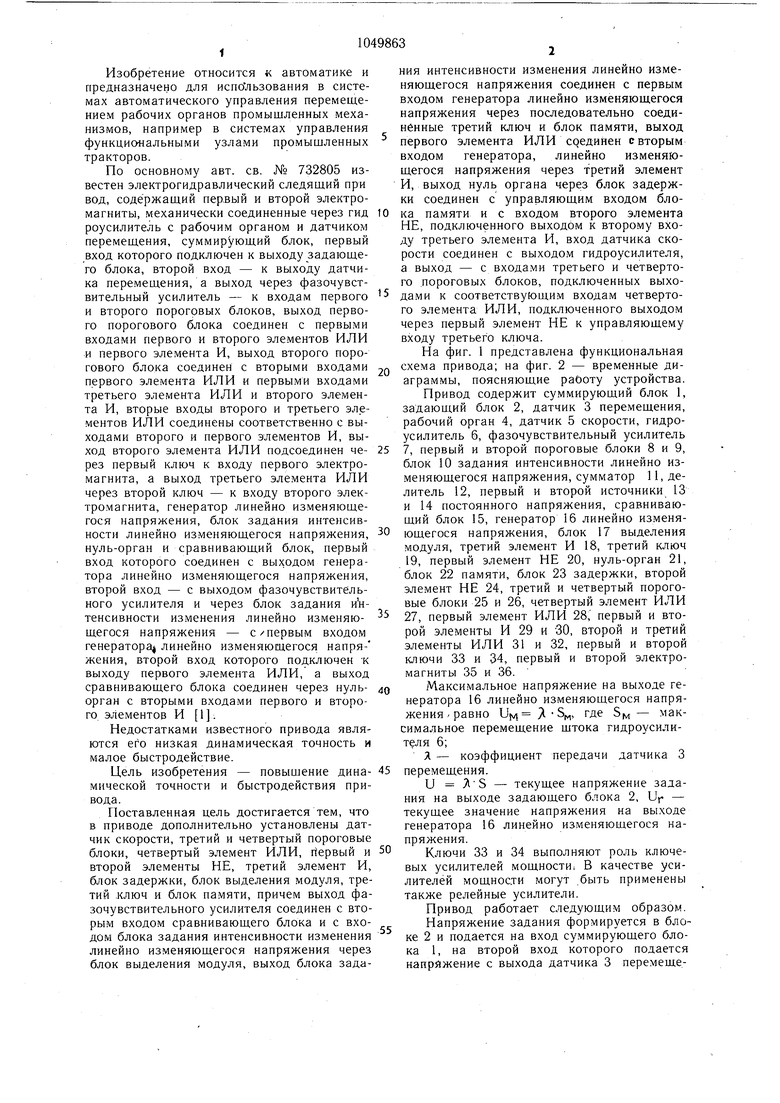

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1977 |
|
SU732805A1 |
| Электрогидравлический следящий привод | 1979 |
|
SU930231A1 |
| Электрогидравлический следящий привод | 1979 |
|
SU901669A1 |
| Электрогидравлический следящий привод | 1977 |
|
SU732802A1 |
| Электрогидравлический следящий при-ВОд | 1979 |
|
SU798709A1 |
| Электрогидравлический следящий привод | 1977 |
|
SU652530A1 |
| Электрогидравлический следящий привод | 1978 |
|
SU802918A1 |
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 1998 |
|
RU2153682C1 |
| Устройство для оптимизации периода и глубины контроля | 1986 |
|
SU1319046A1 |
| Обратимый преобразователь координат | 1982 |
|
SU1035617A1 |
ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД по авт. св. № 732805, отличающийся тем, что, с целью повышения динамической точности и быстродейстрия привода, в нем дополнительно установлены датчик скорости, третий и четвертый пороговые,блоки, четвертый элемент ИЛИ, первый и второй элементы НЕ, третий элемент И, блок задержки, блок выделения модуля, третий ключ и блок памяти, причем выход фазочувствительного усилителя соединен с вторым входом хравнивающего блока и с входо.м блока задания интенсивности изменения линейно изменяющегося напряжения через блок выделения модуля, выход блока задания интенсивности изменения линейно изменяющегося напряжения соединен с первым входом генератора линейно изменяющегося напряжения через последовательно соединенные третий ключ и блок памяти выход первого элемента ИЛИ соединён с вторым входом генератора линейно изменяющегося напряжения через третий элемент И, выход нуль-органа через блок задержки соединён с управляющим входом блока памяти и с входом второго элемента НЕ, подключенного выходом к второму входу третьего элемента И, вход датчика скорости соединен с выходом гидроусилителя, i а выход - с входами третьего и четвертого пороговых блоков, подключенных выхо(Л дами к соответствующим входам четвертого элемента ИЛИ, подключенного выходом через первый элемент НЕ к управляющему входу третьего ключа. 4 00 05 СО
Фаг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электрогидравлический следящий привод | 1977 |
|
SU732805A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
