Изобретение относится к контрольно-измерительной технике и может использоваться в качестве задатчика микроперемещеиий при аттестации и по- верке средств измерений, а также в качестве исполнительиого механизма вы сокоточных перемещений в системах автоматического управления.
Цель изобретения - повьшение стати ческой и динамической точности задатчика микроперемещений при одновременном обеспечении линейности и расширения динамического диапазона перемещений, а также повышение производи-v тельности поверочно-настроенных операций.
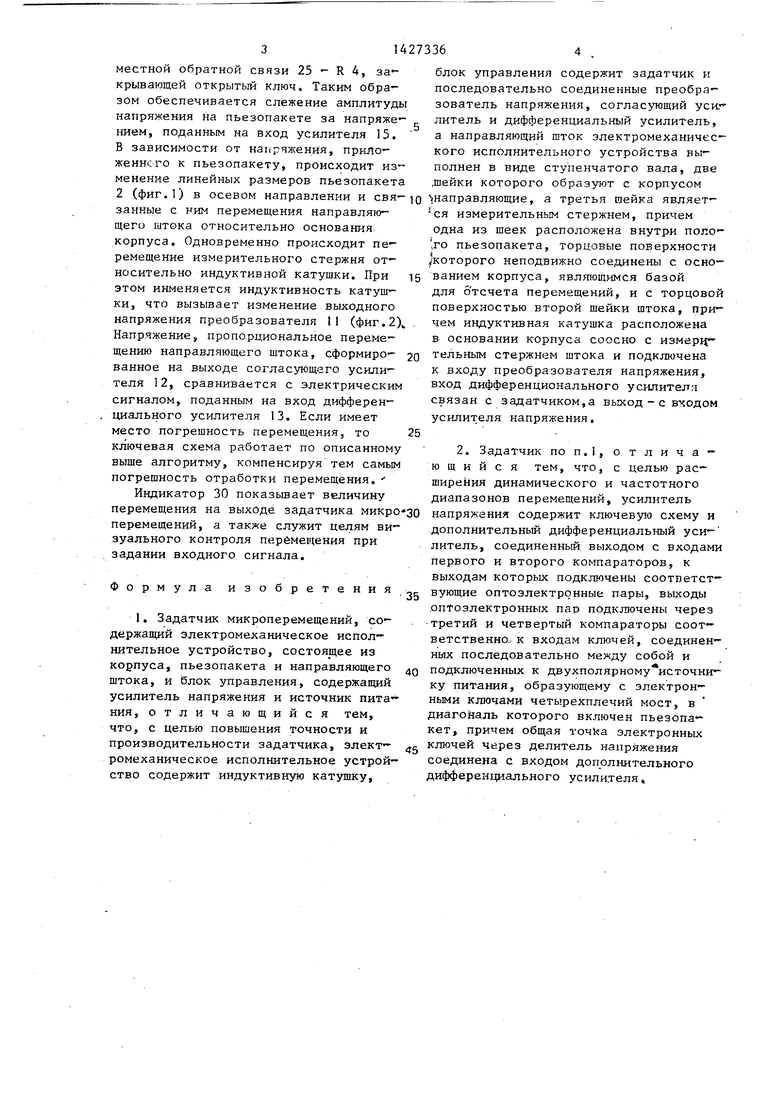
На фиг.1 показана конструкция электромеханического исполнительного устройства; -на фиг,2 - функциональная схема задатчика микроперемещений,
Электромеханическое исполнительное устройство состоит из корпуса 1, пьезопакета 2, направляющего штока 3 с измерительным стержнем 4, являющим- ся третьей шейкой, первой 5 и второй 6 шейками, индуктивной катушки 7 и двух крьаиек корпуса 8,9. Нижняя торцовая поверхность пьезопакета неподвижно соединена с основанием корпу- са, являющимся базовой поверхностью для отсчета перемещений направляюще- I o штока. Верхняя торцовая поверхность пьезопакета неподвижно соединена с торцовой поверхиостью направляю- щего штока. Так как между корпусом, пьезопакетом и штоком обеспечена жесткая механическая связь, то точног стные и инерционные свойства электромеханического исполнительного устрой- ства определяются практически только точностными и инерционными свойствами пьезопакета, В этом случае обеспечивается разрешающая способность в пределах сотых долей микрометра в диапазоне перемещений не менее /. 100 мкм. Полоса воспроизводимых частот не менее 1 кГц,
Блок управления состоит из генератора 10 высокой частоты, преобразователя напряжения 11, согласующего уси; лителя 12, дифференциального усилителя 13, ключевого усилителя, напряжения. А, состоящего из дифференциального усилителя 15, компараторов 16,17 оптоэлектронных пар 18,19, компараторов 20,21, электронных ключей 22,23 23, делителя напряжения, образованного резисторами 24 и 25, Пьезопакет 26
Ю 15
20
25 30 35 0
5
5
0
подключен к общей точке электронных ключей. Ключевой усилитель предназначен для усиления входного сигнала и образует в задатчике микроперемещений с пьезопакетом канал прямой связи. Генератор 10, преобразователь Пи усилитель 12 образуют канал обратной связи, предназначенной для уменьше- ния влияния инструментальных и внешних факторов, вызьюающих погрешности отработки перемещения, а также обеспечивает дианеризацию статической характеристики преобразования в 1/(1+К,-Кг) число раз, где К и Кг - коэффициенты передачи каналов и обратной связи соответственно. Таким образом линейность статической характеристики, а также погрешность перемещения определяются, главным образом, характеристиками индуктивной кaтyшkи,
Задатчик микроперемещений работает. следующим образом. При подаче на вход дифференциального усилителя 13 электрического сигнала выходное напряже- . ние, усиленное дифференциальным усилителем 15, переключает компаратор 16 или 17 в зависимости от полярности входного сигнала. При переключении компаратора включается соответствующая оптоэлектронная пара 18 или 19, которая, в свою очередь, переключает компаратор 20 или 21 в единичное состояние и, тем самым, открывает электронный ключ 22 или 23 соответственно. После открытия ключа происходит заряд электроемкости пьезопакета электрическим напряжением от источника высоковольтного питания +Vn или -Vn в зависимости от открытого ключа. Постоянная времени заряда определяется произведением сопротивления балластного резистора 27-R 8 (28-R 9) и суммарной емкости пьезопак Ъта и конденсатора 29-С1 и выбирается из условия обеспечения необходимого быстродействия в режиме подачи на вход блока переменного сигнала. Обеспечение заданной полосы пропускания достигается выбором постоянной времени заряда, которая определяется по формуле
яс . if-°,
где fe - значение верхней граничной частоты полосы пропускания. Изменение напряжения на пьезопакете при заряде прекращается за счет введения цепи
.5
местной обратной связи 25 - R 4, sa-- крывающей открытый ключ. Таким образом обеспечивается слежение амплитуды напряжения на пьезопакете за напряже-- нием, поданным на вход усилителя 15. В зависимости от на1фяжения, приложенного к пьезопакету, происходит из менение линейных размеров пьезопакета 2 (фиг.1) в осевом направлении и свя-ig занные с ним перемещения направляющего штока относительно основания корпуса. Одновременно происходит перемещение измерительного стержня относительно индуктивной катушки. При 15 этом инменяется индуктивность катушки, что вызывает изменение выходного напряжения преобразователя II (фиг. 2),, Напряжение, пропорциональное перемещению направляющего штока, сформиро- 20 ванное на выходе согласующего усилителя 12, сравнивается с электрическим сигналом, поданным на вход дифференциального усилителя 13. Если имеет место погрешность перемещения, то 25 ключевая схема работает по описанному выше алгоритму, компенсируя тем самым погрешность отработки перемещения. Индикатор 30 показывает величину перемещения на выходе задатчика микрО ЗО перемещений, а также служит целям визуального контроля перемещения при задании входного сигнала.
ормула изобретения
1. Задатчик микроперемещений, содержащий электромеханическое исполнительное устройство, состоящее из корпуса, пьезопакета и направляющего штока, и блок управления, содержащий усилитель напряжения и источник пита- ния, отличающийся тем, что, с целью повышения точности и производительности эадатчика, элект- ромеханическое исполнительное устройство содержит индуктивную катушку.
5
g 5 0 5 О
5
Q д
блок управления содержит задатчик и последовательно соединенные преобразователь напряжения, соглас тощий усиг литель и дифференциальный усилитель, а направляющий шток электромеханического исполнительного устройства выполнен в виде ступенчатого вала, две ,шейки которого образуют с корпусом направляющие, а третья шейка являет- ся измерительным стержнем, причем одна из шеек расположена внутри поло- го пьезопакета, торцовые поверхности JKOTOporo неподвижно соединены с основанием корпуса, являющимся базой для о тсчета перемещений, и с торцовой поверхностью второй шейки штока, причем индуктивная катушка расположена в основании корпуса соосно с измерительным стержнем штока и подключена к входу преобразователя напряжения, вход дифференционального усилителя связан с задатчиком,а выход - с входом усилителя напряжения.
2. Задатчик поп.1, отличающийся тем, что, с целью расширения динамического и частотного диапазонов перемещений, усилитель напряжения содержит ключевую схему и дополнительный дифференциальный уси- литель, соединенный выходом с входами первого и второго компараторов, к выходам которых подключены соответствующие оптоэлектронные пары, выходы .оптозлектронных пар подключены через третий и четвертый компараторы соответственно, к входам ключей, соединенных последовательно между собой и подключенных к двухполярному источнику питания, образующему с электронными ключами четырехплечий мост, в диагойаль которого включен пьезопа- кет, причем общая электронных ключей через делитель напряжения соединена с входом дополнительного дифференциального усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Задатчик микроперемещений | 1987 |
|
SU1513421A1 |
| Задатчик микроперемещений | 1988 |
|
SU1587319A1 |
| Исполнительный механизм микроперемещений | 1990 |
|
SU1784949A1 |
| Исполнительный механизм микроперемещений | 1990 |
|
SU1798767A1 |
| Устройство для позиционирования | 1988 |
|
SU1644094A1 |
| Устройство для позиционирования исполнительного органа | 1988 |
|
SU1645133A1 |
| Автоматический регулятор влажности формуемого глиняного бруса | 1990 |
|
SU1742062A1 |
| Исполнительный механизм линейных перемещений | 1988 |
|
SU1520484A1 |
| ВИХРЕТОКОВОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1992 |
|
RU2044312C1 |
| ИНДУКТИВНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2452917C1 |
Изобретение относится к контрольно-измерительной технике и может использоваться в качестве задйтчика эталонных микроперемещений при аттестации и поверке средств измерений в статическом и динамическом режимах, а также в качестве исполнительного механизма высокоточных микроперемещений в системах автоматического управления. Цель - повышение точности и производительности задатчика. Поставленная цель достигается тем, что заг датчик микроперемещений содержит электромеханическое исполнительное устройство и блок управления. Электромеханическое исполнительное устройство состоит из корпуса, пьезопакета, выполненного в виде полого цилиндра, направляющего штока, выполненного в виде ступенчатого вала, и индуктивной катушки. Две шейки штока образуют с корпусом направляющие, а третья - является измерительным стержнем, уста новленным соосно с индуктивной катушкой. Блок управления содержит усилитель напряжения, преобразователь напряжения, подключенный к индуктивной катушке, и согласующий усилитель. К выходу усилителя напряжения, выполненного по ключевой схеме с гальванической развязкой на оптоэлектронных- парах, подключен пьезопакет, а к вхо ду - преобразователь перемещений. 2 ил. сл Nd со со СП
Фиъ. г
26
-1-«I/
TfTffyyry
| Виноградов Ю.Д | |||
| и др | |||
| Электронные измерительнйе системы для контроля малых перемещений | |||
| М.: Машиностроение, 1976, с.116-134 | |||
| Шачнев В).А | |||
| и др | |||
| Автоматическое управление точностью обработки при помощи пьезокерамических исполнительных механизмов.- Технология производства, научная организация труда и управления, 1979, № 6, с.18-20. |
