1
(21)4609464/24
(22)17.10.88
(46) 23,04.91, Бкш0 Р 15 (71) Московский институт приборостроения
(72) Ю.Л.. Николаев, А.Г, Ершов, В.А, Смирнов и О.И0 Петров
(53)62-50(088.8)
(56)Иванов АоА. Проектирование систем автоматического манипулирования изделиями. - М.: Машиностроение, 1981, с, 216-228.
Промышленная робототехника./Под ред. Я.А„ П ифрина, - У.: Машиностроение, 1982, с. 188-209.
(54)УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ
(57)Изобретение относится к средствам автоматического управления перемещением рабочих органов приборных и технологических систем и может использоваться в технике линейных измерений,
приборах точной механики и оптики, технологическом оборудовании, в частности в робототехнических устройствах, в качестве однокоординатного многопозиционного модуля линейных перемещений. Цель изобретения - повышение точности позиционирования. Для этого электромеханический исполнительный механизм снабжен пьезопаке- том 4 и управляемым захватом 5 поверхности цилиндрической направляющей корпуса, а в блок управления введены ключи 14, 15, двухпороговый компаратор 12, триггер 13, усилитель 16 напряжения питания пьезопакета 4 и релейный элемент 17 включения захвата 50 Такое техническое решение позволяет обеспечить многопозиционный цикл работы с поддержанием точности позиционирования в пределах погрешности измерения положения подвижного штока u 4 ил.
(Л
Изобретение относится к. средствам автоматического управления перемещением рабочих органов приборных и технологических систем и может использоваться в технике линейных измерений, приборах точной механики и оптики, технологическом оборудовании, в частности в робототехнических устройствах в качестве однокоординатного многопозиционного модуля линейных перемещений
Цель изобретения - повышение точности позиционирования,,
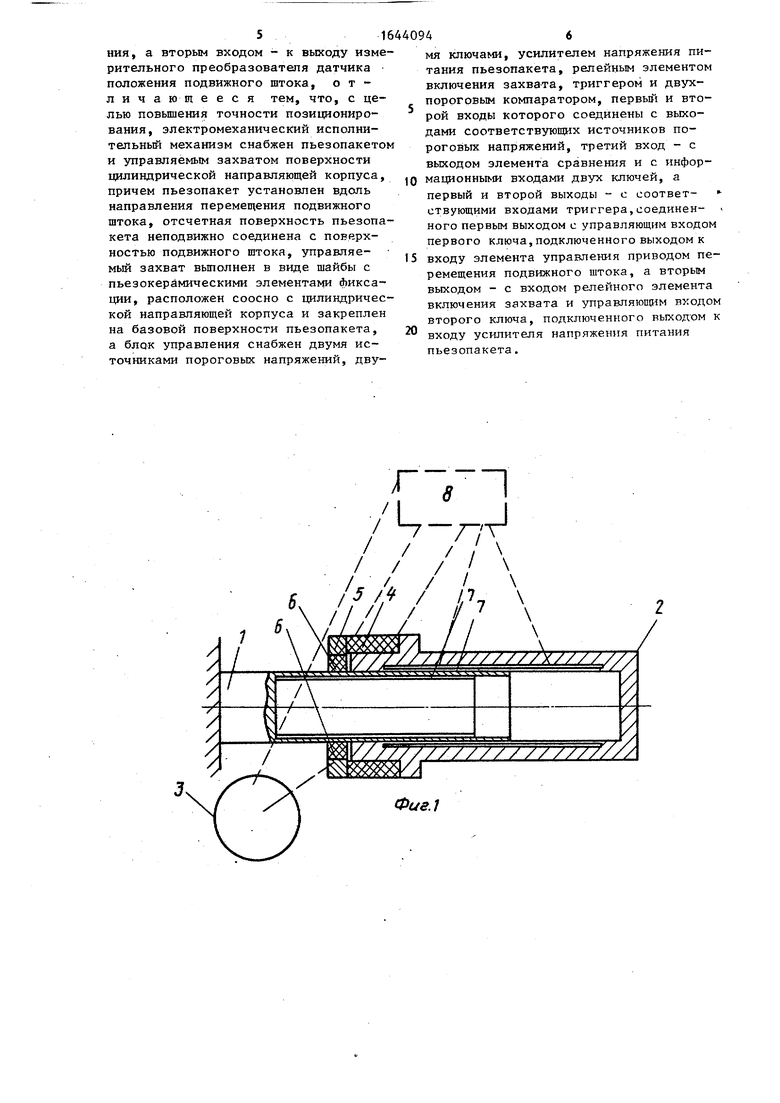
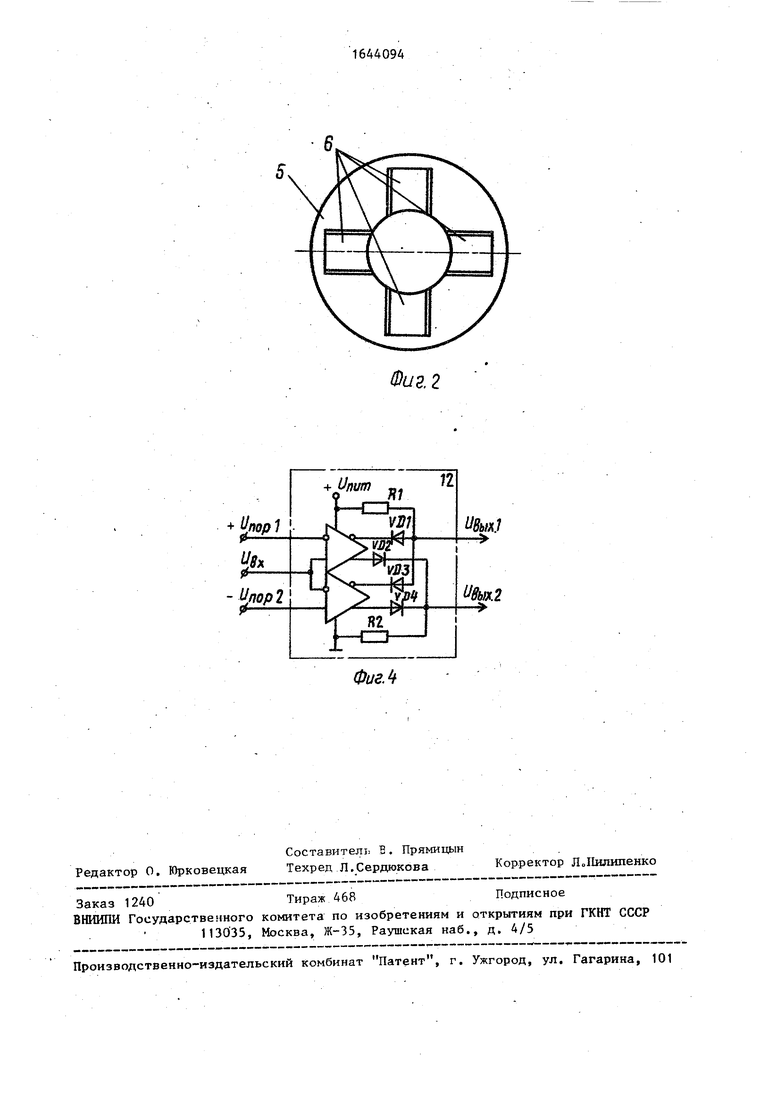
На фиг. 1 показано конструктивное выполнение устрбйства для позиционирования; на фиг о 2 - пример выполнения управляемого захвата; на фиг. 3 - структурная схема устройства; на фиг
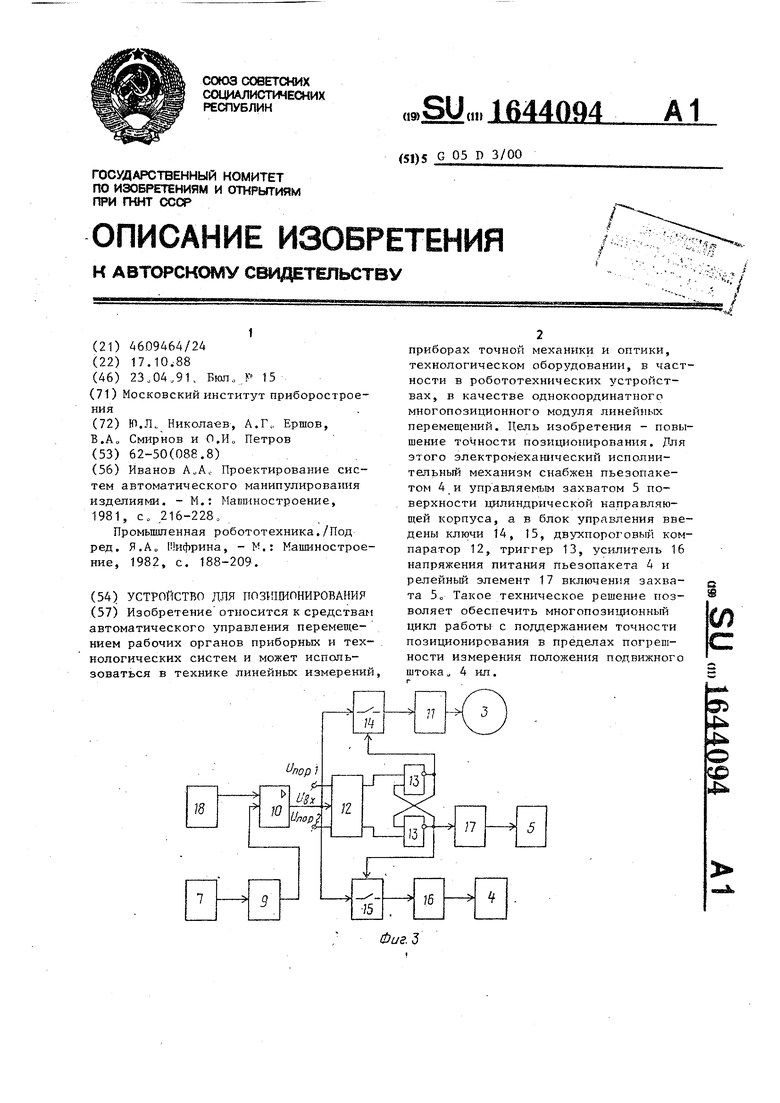
преобразователя 9 отклонение поступает через замкнутый ключ 15 на вход усилителя 16, выходное напряжение которого вызывает соответствующее изменение размера пьезопакета 4 в осевом направлении„ В результате происходит перемещение отсчетной поверхности пьезопакета, приводящее в двиJQ жение подвижный шток и регулирующее его положение. Если сигнал ошибки превышает Ur,0p, или U П0р2 /, компаратор 12 переключает триггер 13 в единичное состояние„ При этом проис15 ходит быстрое отключение захвата 5, что обеспечивается подачей обратного напряжения с релейного элемента 17 на пьезокерамические элементы 6 фиксации, вызывая уменьшение линейного
4 - функциональная схема двух- 0 РазмеРа последних. Одновременно вы- порогового компаратора ключаетея ключ 15,устанавливая пьезопакет в нулевое положение, и включаУстройство для позиционирования (фиг о 1) содержит корпус 1 с цилиндрической направляющей, подвижный шток 2, соединенный с приводом 3, пьезо- пакет 4 с закрепленным на его базовой торцевой поверхности захватом 5, установленный неподвижно отсчетной поверхностью на подвижном штоке Захват
ется ключ 14.В результате посредством элемента 11 управления и привода 3 25 осуществляется перемещение штока устройства в направлении, зависящем от знака сигнала ошибки. При достижении сигнала ошибки, соответствующего пороговому значению ипор(или .
ется ключ 14.В результате посредством элемента 11 управления и привода 3 25 осуществляется перемещение штока уст ройства в направлении, зависящем от знака сигнала ошибки. При достижении сигнала ошибки, соответствующего пороговому значению ипор(или .
5 (фиг о 2) выполнен в виде шайбы, происходит установка триггера в ну- ри которой установлены пьезокерамические элементы 6 Ьиксации0 При этом захват 5 взаимодействует с поверхностью цилиндрической направляющей кор пуса 1t Положение подвижного штока 2
45
35
измеряется датчиком 7 положения Устройство также содержит блок 8 управления, имеющий измерительный преобразователь 9 датчика положения, элемент 10 сравнения, элемент 11 управ- 4д ления приводом, двухпороговый компаратор 12, триггер 13, ключи 14 и 15, усилитель 16 напряжения питания пьезопакета, релейный элемент 17 захвата и задатчик 18 положения.
Устройство работает следующим образом.
В исходном состоянии сигнал ошиб- , ки на выходе элемента 10 находится в пределах от Д° илор2. этом триггер 13 находится в нулевом состоянии Ключ 14 выключен, ключ 15 включен, а релейный элемент 17 удерживает захват 5 во включенном состоят нии, обеспечивая механическую связь корпуса 1 с подвижным штоком 2 через пьезопакет 4„ При значениях сигнала ошибки в пределах от Unopi Д° пор2 измеренное с помощью датчика 7 и
50
S5
левое положение, в результате чего привод 3 отключается и включается захват 5 и цепь управления пьезопа- кетом 4. Устройство переходит в исходное состояние с регулированием заданного положения посредством пьезопакета о
Предлагаемое техническое решение позволяет обеспечить многопозиционны цикл работы с поддержанием точности позиционирования в пределах погрешности измерения положения подвижного штока.
Формула изобретения
Устройство для позиционирования, содержащее электромеханический исполнительный механизм, состоящий из корпуса с цилиндрической направляющей, на которой размещен цилиндрический подвижный шток, соединенный с приводом перемещения подвижного штока и датчиком положения подвижного штока, а также блок управления, содержащий элемент управления приводом перемещения подвижного штока и элемент сравнения, подключенный первым входом к выходу задатчика положе
преобразователя 9 отклонение поступает через замкнутый ключ 15 на вход усилителя 16, выходное напряжение которого вызывает соответствующее изменение размера пьезопакета 4 в осевом направлении„ В результате происходит перемещение отсчетной поверхности пьезопакета, приводящее в движение подвижный шток и регулирующее его положение. Если сигнал ошибки превышает Ur,0p, или U П0р2 /, компаратор 12 переключает триггер 13 в единичное состояние„ При этом происходит быстрое отключение захвата 5, что обеспечивается подачей обратного напряжения с релейного элемента 17 на пьезокерамические элементы 6 фиксации, вызывая уменьшение линейного
ется ключ 14.В результате посредством элемента 11 управления и привода 3 осуществляется перемещение штока устройства в направлении, зависящем от знака сигнала ошибки. При достижении сигнала ошибки, соответствующего пороговому значению ипор(или .
происходит установка триггера в ну-
происходит установка триггера в ну-
левое положение, в результате чего привод 3 отключается и включается захват 5 и цепь управления пьезопа- кетом 4. Устройство переходит в исходное состояние с регулированием заданного положения посредством пьезопакета о
Предлагаемое техническое решение позволяет обеспечить многопозиционный цикл работы с поддержанием точности позиционирования в пределах погрешности измерения положения подвижного штока.
Формула изобретения
Устройство для позиционирования, содержащее электромеханический исполнительный механизм, состоящий из корпуса с цилиндрической направляющей, на которой размещен цилиндрический подвижный шток, соединенный с приводом перемещения подвижного штока и датчиком положения подвижного штока, а также блок управления, содержащий элемент управления приводом перемещения подвижного штока и элемент сравнения, подключенный первым входом к выходу задатчика положения, а вторым входом - к выходу измерительного преобразователя датчика положения подвижного штока, отличающееся тем, что, с целью повышения точности позиционирования, электромеханический исполнительный механизм снабжен пьезопакетом и управляемым захватом поверхности цилиндрической направляющей корпуса, причем пьезопакет установлен вдоль направления перемещения подвижного штока, отсчетная поверхность пьезопа- кета неподвижно соединена с поверхностью подвижного штока, управляемый захват выполнен в виде шайбы с пьезокерамическими элементами Аикса- ции, расположен соосно с цилиндрической направляющей корпуса и закреплен на базовой поверхности пьезопакета, а блок управления снабжен двумя источниками пороговых напряжений, двумя ключами, усилителем напряжения питания пьезопакета, релейным элементом включения захвата, триггером и двух- пороговым компаратором, первый и второй входы которого соединены с выходами соответствующих источников пороговых напряжений, третий вход - с выходом элемента сравнения и с информационными входами двух ключей, а
первый и второй выходы - с ооответ- ствующими входами триггера,соединен- ного первым выходом с управляющим входом первого ключа,подключенного выходом к
5 входу элемента управления приводом перемещения подвижного штока, а вторым выходом - с входом релейного элемента включения захвата и управляющим входом второго ключа, подключенного выходом к входу усилителя напряжения питания пьезопакета.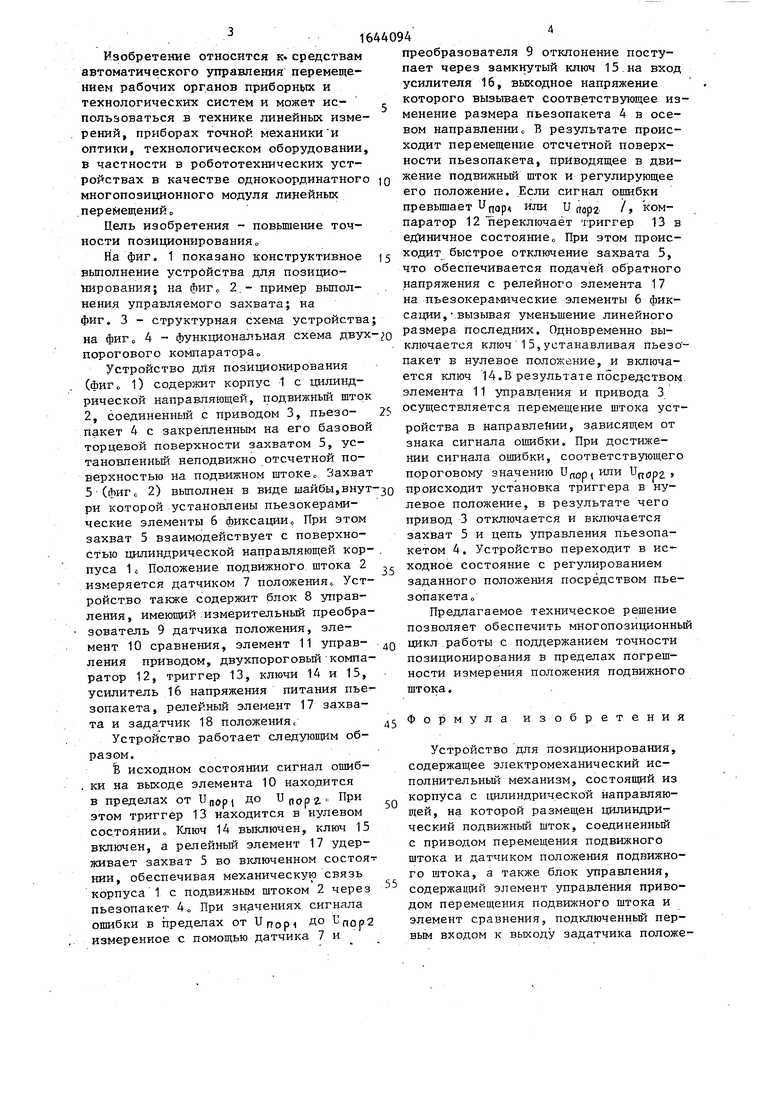
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционирования исполнительного органа | 1988 |
|
SU1645133A1 |
| Исполнительный механизм линейных перемещений | 1988 |
|
SU1520484A1 |
| Исполнительный механизм микроперемещений | 1990 |
|
SU1784949A1 |
| Задатчик микроперемещений | 1987 |
|
SU1427336A1 |
| Исполнительный механизм микроперемещений | 1990 |
|
SU1798767A1 |
| Задатчик микроперемещений | 1988 |
|
SU1587319A1 |
| Задатчик микроперемещений | 1987 |
|
SU1513421A1 |
| МНОГОКАНАЛЬНОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1985 |
|
SU1329432A1 |
| Устройство синхронизации сигнала несущей частоты | 1984 |
|
SU1195467A1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 1998 |
|
RU2133483C1 |
,
д-v
/ /
/ / / /
Ш г
Ч гчхтллллххч/ л I I
+ Unum д 2
Фиг. 2
Ubtf
ФигЛ
