Изобретение относится к средствам автоматического управления перемещением рабочих органов приборных и технологических систем и может использоваться в технике линейных измерений, приборах точной механики и оптики, технологии микроэлектроники и механообработки для обеспечения точности
и быстродействия перемещения и позиционирования.
Цель изобретения - повьш1ение точности перемещения и быстродействия позиционирования.
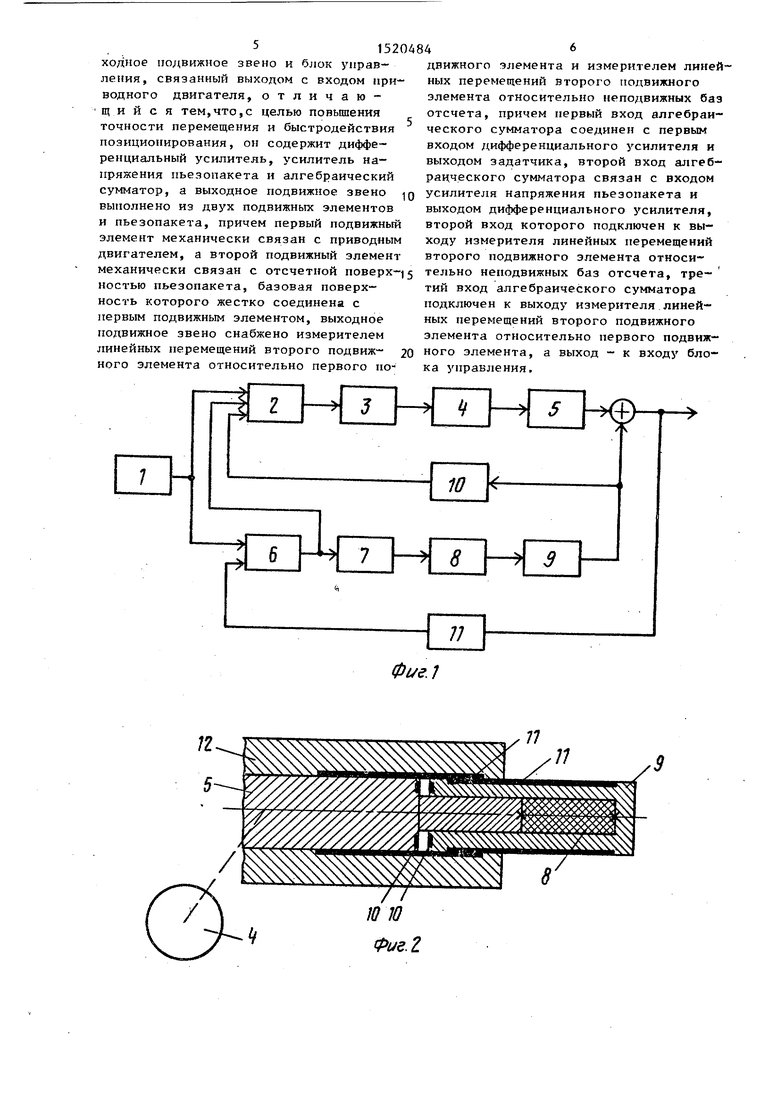
iia фиг. 1 показана блок-схема исполнительного механизма линейнйх перемрщрпий; на фиг. 2 - пример выполнения выходног о подвижного звена.
Исполнительный механизм линейных перемещений состоит из задатчика 1, алгебраического сумматора 2, блока 3 управления, приводного двигателя 4, первого подвижного элемента 5 (наири- мер, направляющего цилиндрического штока), диффере}1циального усилителя 6, усилителя 7 напряжения пьезопакета, пьезопакета 8, второго подвижного элемента 9 (например, полого цилиндрического штока), измерителя 10 линейных перемещений второго подвижного элемента и измерителя 11 линейных перемещений второго подвижного элемента относительно неподвижной базы отсчета.
Исполнительный механизм линейных перемещений работает следующим образом.
При измерении сигнала на выходе задатчика 1 управляющего сигнала, соответствующего малому перемещению, на выходе дифференциального усилителя 6 появляется сигнал рассогласования между задающим сигналим и выходным перемещением, измеренным измерителем 11. Это рассогласование, уси- ленрое усилителем 7 напряжения, поступает на пьезопакет 8, вызывая перемещение подвижного элемента 9. Одновременно задающий сигнал, сигнал рассогласования и сигнал, пропорциональный перемещению подвижного элемента 9 поступают на входы алгебраического сумматора 2, Если компенсация малого перемещения может быть осуществлена только за счет перемещения подвижного элемента 9, то, учитывая, что пьезопакет обладает большей чувствительностью и быстродействием, чем приводкой двигатель, на выходе алгебраического сумматора выходной сигнал вновь становится равным нулю, а подвижный элемент 5 приводного двигателя не изменяет своего положения.
Исполнительный механизм работает аналогично при появлении факторов, дестабилизирующих положение второго подвижного элемента относительно неподвижных баз отсчета, например вибрации, изменения нагрузки, температурных деформаций и др., .если их величина меньще диапазона перемещег НИИ пьезоиакета. В этом случае сигнал на выходе задатчика 1 управляющего сигнала остается неизменным, а рассогласование, появляющееся на
0
выходе дифференциального усилителя 6, компенсируется перемещением подвиж- цого элемента 9, не изменяя подвижно- го элемента 5. В том случае, когда изменение задающего воздействия или влияния дестабилизирующих факторов невозможно компенсировать только перемещением подвижного элемента 9,
Q на выходе алгебраического сумматора появляется сигнал ошибки, который, будучи преобразован блоком управления приводным двигателем, вызывает перемещение подвижного элемента 5
5 до тех пор, пока величина рассогласования на выходе дифференциального усилителя 6 не станет меньшей, чем диапазон перемещений второго подвижного звена. Начиная с этого момента, имеет место стабилизация положения и компенсация погрешностей перемещения. Таким образом, обеспечивается последовательное включение подвижных элементов, что позволяет получить тре-
5 буемое качество исполнительного механизма в широком диапазоне перемещений, а значение погрешности перемещения и позиционирования - не больше погрешности измерителя линейных перемещений второго подвижного элемента относительно неподвижной базы.
Одна из возможных реализаций подвижного звена (фиг. 2) содержит направляющий цилиндрический шток 5, пред ставляющий собой первый подвижный элемент, полый цилиндрический шток 9 - второй подвижный элемент. Направляющей штока 5 является внутренняя поверхность корпуса механизма 12, а направляющей штока 9 - шейка штока 5. Внутри полого цилиндрического штока 9 установлен пьезопа- кет 8, торцы которого неподвижно соединены со штоками 5 и 9. Положение штока 9 относительно штока 5 измеряется измерителем 10 (кольцевым преобразователем, например, емкостного типа). Положение отсчетной поверхности штока 9 относительно корпуса 12 измеряется измерителем 11, который 0 может быть выполнен в виде системы цилиндрических Конденсаторов. На фиг. 2 показана также механическая связь штока с приводным двигателем 4.
5 Формула изобретения
Исполнительный механизм линейных перемещений, содержащий задатчик, вы0
5 1
0
5
ходное подвижное звено и блок управления, связанный выходом с входом приводного двигателя, отличаю- щ и и с я тем,что,с целью повьппения точности перемещения и быстродействия позиционирования, он содержит дифференциальный усилитель, усилитель напряжения пьезопакета и алгебраический сумматор, а выходное подвижное звено выполнено из двух подвижных элементов и пьезопакета, причем первый подвижный элемент механически связан с приводным двигателем, а второй подвижный элемент
движного элемента и измерителем линейных перемещений второго подвижного элемента относительно неподвижных баз отсчета, причем первый вход алгебраического сумматора соединен с первым входом дифференциального усилителя и выходом эадатчика, второй вход алгебраического сумматора связан с входом усилителя напряжения пьезопакета и выходом дифференциального усилителя, второй вход которого подключен к выходу измерителя линейных перемещений второго подвижного элемента относи

| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный механизм микроперемещений | 1990 |
|
SU1784949A1 |
| Исполнительный механизм микроперемещений | 1990 |
|
SU1798767A1 |
| Задатчик микроперемещений | 1987 |
|
SU1513421A1 |
| Задатчик микроперемещений | 1987 |
|
SU1427336A1 |
| РЕГУЛЯТОР ЛИНЕЙНОЙ ПЛОТНОСТИ ВОЛОКНИСТОГО ПРОДУКТА | 1991 |
|
RU2038437C1 |
| Пресс для гибки заготовок с растяжением | 1982 |
|
SU1107927A1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2010 |
|
RU2425257C1 |
| ТЕРМОННЫЙ РЕГУЛЯТОР | 1992 |
|
RU2017200C1 |
| Установка для получения многослойных полупроводниковых гетероэпитаксиальных структур методом жидкофазной эпитаксии | 1989 |
|
SU1674295A1 |
| Устройство для позиционирования исполнительного органа | 1988 |
|
SU1645133A1 |
Изобретение относится к средствам автоматического управления перемещением рабочих органов приборных и технологических систем. Цель изобретения - повышение точности перемещения и быстродействие позиционирования. Для достижения цели механизм линейных перемещений содержит задатчик, приводной двигатель с блоком управления, выходное подвижное звено, выполненное из двух подвижных элементов и пьезопакета, управляемого от усилителя напряжения. Такое соединение элементов позволяет получить высокую разрешающую способность механизма в сочетании с большим диапазоном перемещений. Выходное подвижное звено оснащено двумя измерителями линейных перемещений выходного подвижного звена относительно первого подвижного элемента и выходного подвижного звена относительно неподвижной базы отсчета. Исполнительный механизм дополнительно содержит дифференциальный усилитель и алгебраический сумматор. Совокупность всех элементов механизма и их соединений позволяет скомпенсировать нестабильность скорости перемещения, повысить точность позиционирования до величины, определяемой погрешностью измерителя линейных перемещений выходного подвижного элемента относительно неподвижной базы отсчета, скомпенсировать влияние дестабилизирующих факторов на работу механизма. 2 ил.
механически связан с отсчетной поверх- з тельно неподвижных баз отсчета, третий вход алгебраического сумматора подключен к выходу измерителя линейных перемещений второго подвижного элемента относительно первого подвиж- 20 ного элемента, а выход - к входу блока управления.
ностью пьезопакета, базовая поверхность которого жестко соединена с первым подвижным элементом, выходное подвижное звено снабжено измерителем линейных перемещений второго подвижного элемента относительно первого поФиеЛ
Pus.Z
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| и др | |||
| Автоматичес- кое управление точностью обработки при помощи пьезокерамических исполнительных механизмов | |||
| - Технология производства; научная организация труда и управления | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Система очувствления и адаптивные промышленные роботы | |||
| Под редакцией Е.И.Попова | |||
| - М.: Машиностроение, 1985, с | |||
| Приспособление для градации давления в воздухопроводе воздушных тормозов | 1921 |
|
SU193A1 |
