Изобретение относится к средствам автоматики и может использоваться в качестве исполнительного механизма высокоточных микроперемещений для регулирования и поднастройки положения подвижных звеньев технологических и приборных систем.
Целью настоящего изобретения является повышение статической и динамической точности регулирования положения подвижного штока исполнительного механизма микроперемещений.
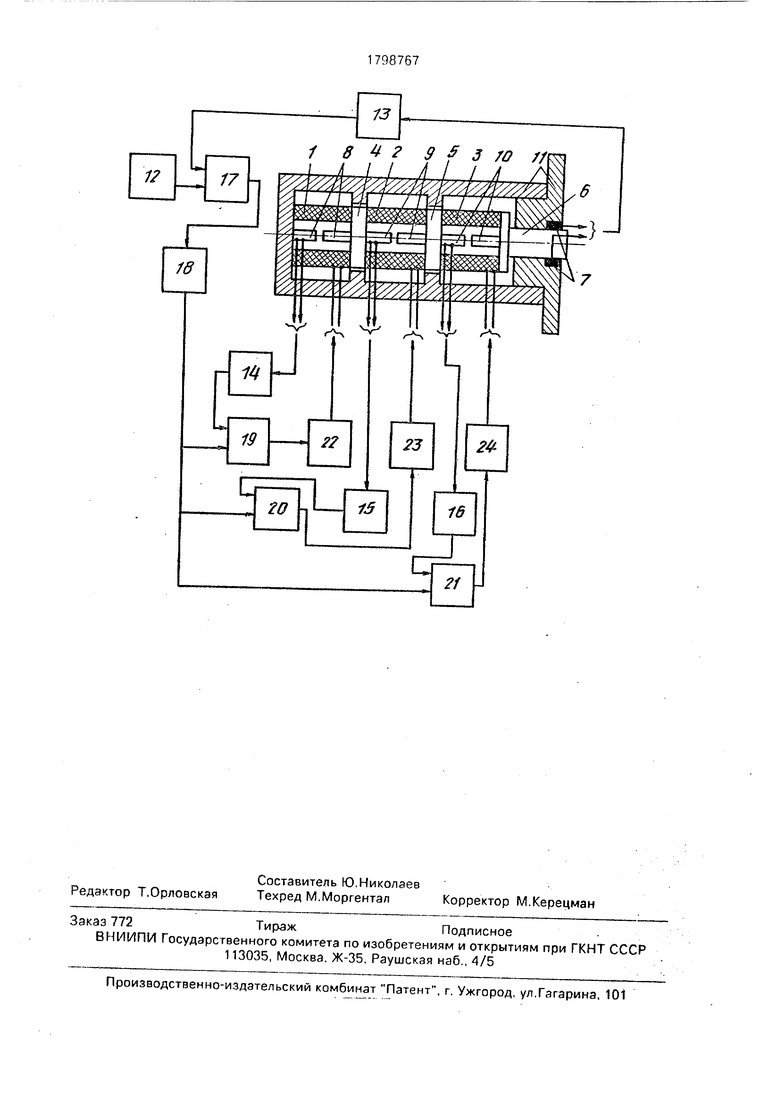
На чертеже показан пример выполне ния исполнительного механизма микроперемещений с трехсекционным пьезопакетом.
Он состоит из электромеханического исполнительного устройства и блока управления. Электромеханическое исполнительное устройство содержит трехсекционный пьеч ю
00
-ч
IO Ч
зопакет, включающий первую 1, вторую 3 и третью 3 секции пьезоэлементов, изолированных между собой прокладками 4 и 5, подвижный шток 6, датчик 7 положения подвижного штока, датчики положения 8-10 отсчетной поверхности первой, второй и третьей секций, а также элементы корпуса 11. Блок управления включает задатчик 12 перемещения подвижного штока V , измерительный преобразователь 13 сигнала с датчика положения подвижного штока, измерительные преобразователи 14-16 сигналов с датчиков положения отсчетной поверхности первой, второй и третьей секций, дифференциальный усилитель 17 сигнала ошибки положения подвижного штока, операционный усилитель 18, дифференциальные усилители 19,20 и 21 сигналов ошибки положения отсчетной поверхности первой, второй и третьей секций соответственно, высоковольтные усилители напряже ния 22,23 и 24 для каждой из секций пьезопакета.
Исполнительный механизм мйкропёре- мещений работает следующем образом.
Требуемое перемещение подвижного штока 6 задается с помощью .задатчика 12, подключенного к одному из входов дифференциального усилителя 17. На второй вход дифференциального усилителя 17 поступает сигнал измерительной информации с дат- чика положения подвижного штока б, преобразованный измерительным преобразователем 13. В результате сравнения задающего и измерительного сигналов на выходе дифференциального усилителя 17 формируется сигнал ошибки положения подвижного штока, который усиливается операционным усилителем 18 и поступает на общий вход дифференциальных усилителей 19,20 и 21. На второй вход дифференциальных усилителей 19,20 и 21 поступают сигналы с датчиков положения 8,9 и 10 соответственно, преобразованные с помощью измерительных преобразователей 14,15 и 16. Сформированный на выходе каждого дифференциального усилителя сигнал ошибки положения отсчетной поверхности соответствующей секции после усиления по напряжению с помощью усилителей 22,23 и 24 поступает для отработки на пьезоэлемен- ты 1,2 и 3 секций. Изменение размеров пьезоэлементов секций под действием управляющего напряжения приводит к перемещению подвижного штока 6, измеряемого датчика 7: В результате система стремится к ликвидации ошибки положения подвижного штока исполнительного механизма.
Благодаря корректирующему действию местных отрицательных обратных связей,
выполненных посекционно, повышается запас устойчивости, а также статическая и динамическая точность регулирования положения подвижного штока исполнительного механизма.
Формула изобретения Исполнительный механизм микроперемещений, содержащий электромеханическое исполнительное устройство,
выполненное в виде установленного в корпусе пьезопакета с подвижным штоком и соосным с ним датчиком положения подвижного штока, а также блок управления, включающий задатчик перемещения по5 движного штока, дифференциальный усили- тель сигнала ошибки положения подвижного штока, подключенный первым входом к выходу задатчика перемещения подвижного штока, операционный усили0 тель напряжения, вход которого подключен к выходу дифференциального усилителя сигнала ошибки положения подвижного штока, и измерительный преобразователь, связанный с датчиком положения подвиж5 ного штока м подключенный выходом к второму входу дифференциального усилителя сигнала ошибки подвижного штока, отличаю щи и с я тем, что, с целью повышения статической и динамической точности, пье0 зопакет выполнен в виде набора отдельных секций из многослойной пьезокерамики. установленных последовательно и изолированных друг от друга с помощью прокладок, причем каждая секция пьезопакета снабже5 на датчиком положения отсчетной поверхности секции относительно ее базовой поверхности, неподвижный чувствительный элемент датчиков положения,закреплен на прокладке в основании секции, а подвиж0 ный чувствительный элемент закреплен на прокладке, установленной на отсчетной поверхности секции, блок управления оснащен дополнительными измерительными преобразователями, каждый из которых
5 связан с датчик-ом положения отсчетной поверхности соответствующей секции, допол- нительными дифференциальными усилителями, первый вход каждого из которых соединен с выходом соответствующего
0 дополнительного измерительного преобразователя, а также высоковольтными усилителями напряжения, каждый из которых подключен входом к выходу соответствующего дополнительного дифференциального
5 усилителя, а выходом - к обкладкам пьезоэлементов соответствующей секции пьезопакета, вторые входы дополнительных дифференциальных усилителей подключены к выходу операционного усилителя напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный механизм микроперемещений | 1990 |
|
SU1784949A1 |
| Устройство для позиционирования исполнительного органа | 1988 |
|
SU1645133A1 |
| Задатчик микроперемещений | 1988 |
|
SU1587319A1 |
| Задатчик микроперемещений | 1987 |
|
SU1427336A1 |
| Задатчик микроперемещений | 1987 |
|
SU1513421A1 |
| Устройство для позиционирования | 1988 |
|
SU1644094A1 |
| Исполнительный механизм линейных перемещений | 1988 |
|
SU1520484A1 |
| Пьезоэлектрический преобразователь микроперемещений | 1989 |
|
SU1657953A1 |
| Позиционный электропривод | 1985 |
|
SU1267576A2 |
| Способ контроля качества поверхности и устройство для его осуществления | 1984 |
|
SU1226008A1 |
Изобретение относится к области аетома- тики I может использоваться в качестве исполнительного механизма высокоточных микроперемещений для регулирования и поднастройки положения подвижнцх звеньев технологических и приборных систем. Цель изобретения - повышение статической и динамической точности регулирования положения подвижного штока исполнительного механизма микроперемещений. Исполнительный механизм состоит из электромеханического исполнительного устройства, выполненного на базе многосекционного пьезопакета, и блока управления. Каждая секция пьезопакета оснащена Датчиком положения отсчетной поверхности секции относительно ее базовой поверхности, а собственно механизм - датчиком положения его выходного подвижного звена. На основе секционных датчиков положения обеспечивается частичная линеаризация и стабилизация характеристик пьезоэлемен- тов, что достигается путем включения датчиков положения в цепь отрицательной обратной связи контуров управления пьезо- злементами отдельных секций. С помощью датчика положения выходного подвижного звена механизма формируется сигнал ошибки для управления многосекционным пьезопакетом, 1 ил.4 (Л С
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ю ,А, Ш эчнев Автоматическое yn pa в- лени.е точностьи обработки при помощи пьезркерамическйх исполнительных механизмов, Технология производства, научная организация труда и управления | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| ; | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Задатчик микроперемещений | 1987 |
|
SU1427336A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
