Изобретение относится к машиностроению и может быть использовано, например, в робототехнических устройствах для перемещения различных исполнительных органов.
Цель изобретения - повышение точности позиционирования за счет уменьшения числа факторов, определяющих погрешности позиционирования, а также за счет более высокого быстродействия элементов устройства.
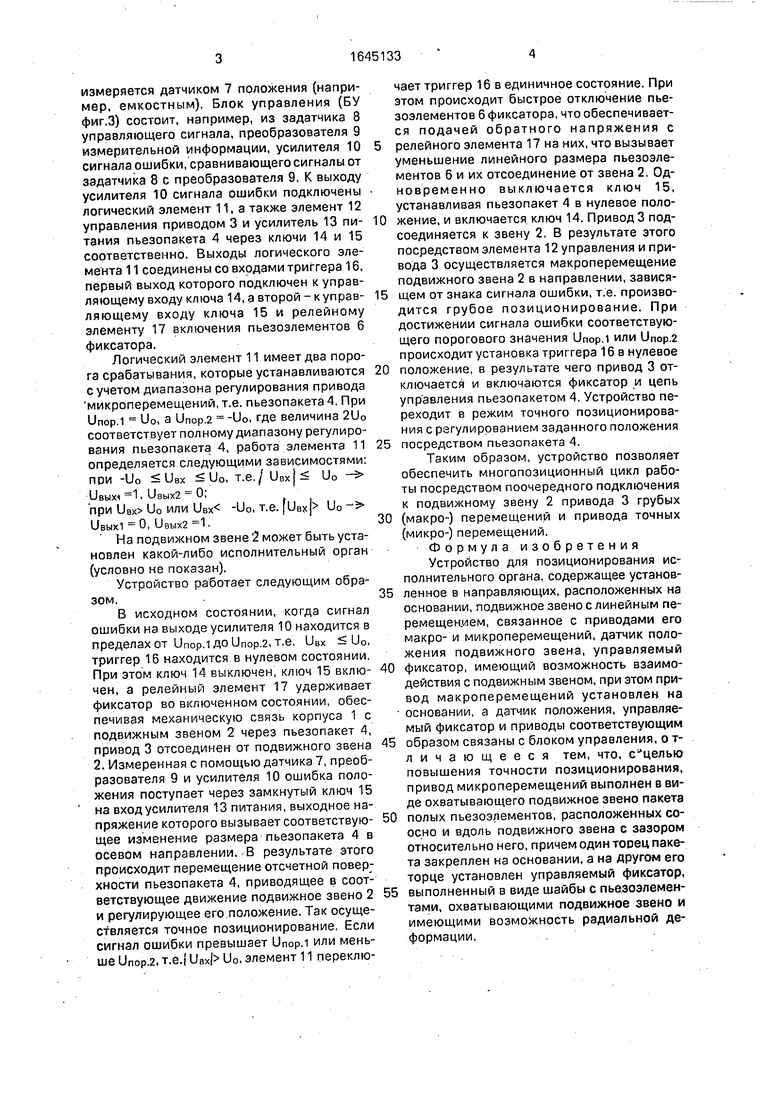
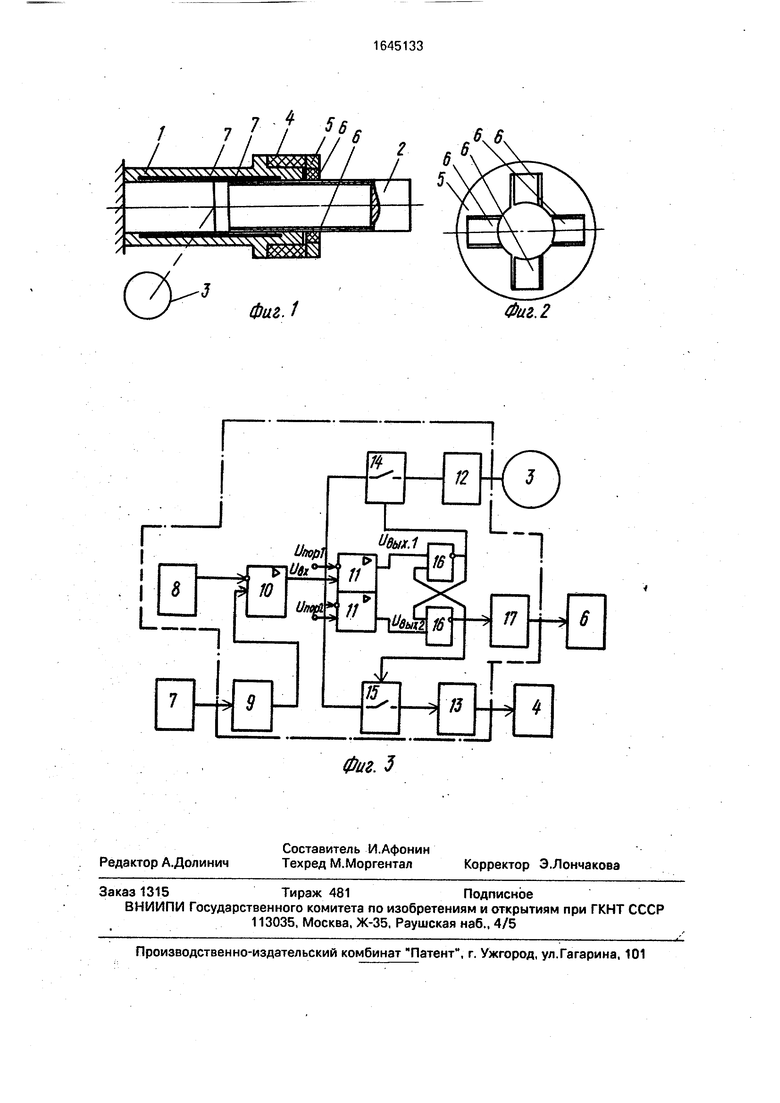
На фиг.1 показан пример конструктивного исполнения устройства; на фиг.2 - пример выполнения управляемого фиксатора; на фиг.З - вариант схемы блока управления.
Устройство для позиционирования содержит установленный на основании корпус 1 с цилиндрической направляющей, подвижное звено 2, соединенное с приводом 3 макроперемещений, привод микроперемещений, выполненный в виде пакета 4 полых пьезоэлементов с закрепленным на его торцовой поверхности управляемым фиксатором. Пакет 4 неподвижно установлен базой поверхностью на корпусе 1 (фиг.1). Управляемый фиксатор выполнен в виде шайбы 5, внутри которой установлены пьезокерамические элементы фиксации 6, имеющие возможность радиальной деформации и взаимодействующие с подвижным звеном 2. Положение подвижного звена 2
о сл
CJ
ы
измеряется датчиком 7 положения (например, емкостным). Блок управления (БУ фиг.З) состоит, например, из задатчика 8 управляющего сигнала, преобразователя 9 измерительной информации, усилителя 10 сигнала ошибки, сравнивающего сигналы от задатчика 8 с преобразователя 9, К выходу усилителя 10 сигнала ошибки подключены логический элемент 11, а также элемент 12 управления приводом 3 и усилитель 13 питания пьезопакета 4 через ключи 14 и 15 соответственно. Выходы логического элемента 11 соединены со входами триггера 16, первый выход которого подключен к управляющему входу ключа 14, а второй - к управ- ляющему входу ключа 15 и релейному элементу 17 включения пьезоэлементов 6 фиксатора.
Логический элемент 11 имеет два порога срабатывания, которые устанавливаются с учетом диапазона регулирования привода микроперемещений, т.е. пьезопакета 4. При Unop.1 Uo, a Unop.2 -Uo, где величина 2U0 соответствует полному диапазону регулирования пьезопакета 4, работа элемента 11 определяется следующими зависимостями: пои -Uo Uex 5U0, т.е./ U0 -з
UBUXS 1, Usbix2 0;
при UBx Uo или UBX -Uo, т.е. UBX Uo J
UBbix1 0, UBbix2 1.
На подвижном звене 2 может быть установлен какой-либо исполнительный орган (условно не показан).
Устройство работает следующим образом.
В исходном состоянии, когда сигнал ошибки на выходе усилителя 10 находится в пределах от Unop.1 до Unop.2, т.е. UBx U0, триггер 16 находится в нулевом состоянии. При этом ключ 14 выключен, ключ 15 включен, а релейный элемент 17 удерживает фиксатор во включенном состоянии, обеспечивая механическую связь корпуса 1 с подвижным звеном 2 через пьезопакет 4, привод 3 отсоединен от подвижного звена 2. Измеренная с помощью датчика 7, преобразователя 9 и усилителя 10 ошибка положения поступает через замкнутый ключ 15 на вход усилителя 13 питания, выходное напряжение которого вызывает соответствующее изменение размера пьезопакета 4 в осевом направлении. В результате этого происходит перемещение отсчетной поверхности пьезопакета 4, приводящее в соответствующее движение подвижное звено 2 и регулирующее его положение. Так осуществляется точное позиционирование, Если сигнал ошибки превышает Unop.1 или меньше Unop.2, T.e.j UBx| Uo, элемент 11 переключает триггер 16 в единичное состояние. При этом происходит быстрое отключение пьезоэлементов 6 фиксатора, что обеспечивается подачей обратного напряжения с
релейного элемента 17 на них, что вызывает уменьшение линейного размера пьезоэлементов 6 и их отсоединение от звена 2. Од- новременно выключается ключ 15, устанавливая пьезопакет 4 в нулевое положение, и включается ключ 14. Привод 3 подсоединяется к звену 2. В результате этого посредством элемента 12 управления и привода 3 осуществляется макроперемещение подвижного звена 2 в направлении, зависящем от знака сигнала ошибки, т.е. производится грубое позиционирование. При достижении сигнала ошибки соответствующего порогового значения Unop.1 или Unop.2 происходит установка триггера 16 в нулевое
положение, в результате чего привод 3 отключается и включаются фиксатор и цепь управления пьезопакетом 4. Устройство переходит в режим точного позиционирования с регулированием заданного положения
посредством пьезопакета 4.
Таким образом, устройство позволяет обеспечить многопозиционный цикл работы посредством поочередного подключения к подвижному звену 2 привода 3 грубых
(макро-) перемещений и привода точных (микро-) перемещений.
Формула изобретения Устройство для позиционирования исполнительного органа, содержащее установленное в направляющих, расположенных на основании, подвижное звено с линейным перемещением, связанное с приводами его макро- и микроперемещений, датчик положения подвижного звена, управляемый
фиксатор, имеющий возможность взаимодействия с подвижным звеном, при этом привод макроперемещений установлен на - основании, а датчик положения, управляемый фиксатор и приводы соответствующим
образом связаны с блоком управления, о т- личающееся тем, что, с целью повышения точности позиционирования, привод микроперемещений выполнен в виде охватывающего подвижное звено пакета
полых пьезоэлементов, расположенных со- осно и вдоль подвижного звена с зазором относительно него, причем один тооец пакета закреплен на основании, а на другом его торце установлен управляемый фиксатор,
выполненный в виде шайбъ с пьезоэлемен- тами, охватывающими подвижное звено и имеющими возможность радиальной деформации.
/
фиг. 1
Фиг, 2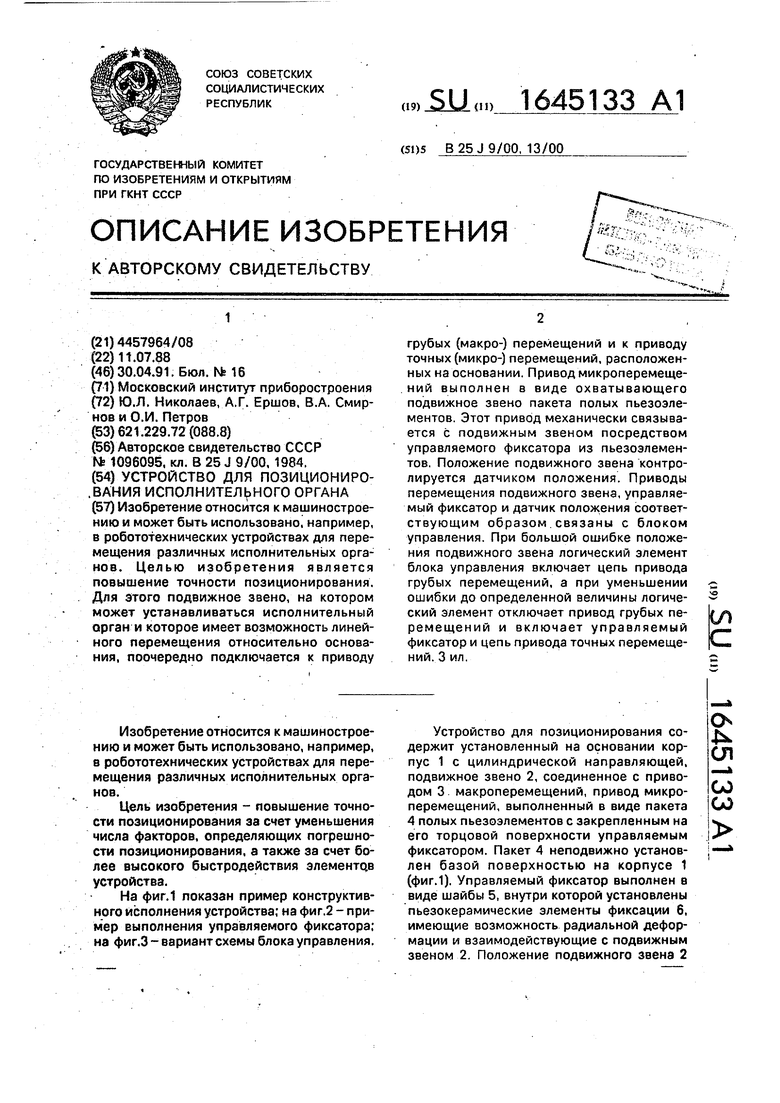
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный механизм микроперемещений | 1990 |
|
SU1798767A1 |
| Исполнительный механизм микроперемещений | 1990 |
|
SU1784949A1 |
| Устройство для позиционирования | 1988 |
|
SU1644094A1 |
| Позиционный электропривод | 1985 |
|
SU1267576A2 |
| Исполнительный механизм линейных перемещений | 1988 |
|
SU1520484A1 |
| Задатчик микроперемещений | 1988 |
|
SU1587319A1 |
| Позиционный электропривод | 1983 |
|
SU1164848A2 |
| УСИЛИВАЮЩИЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР ПОВЫШЕННОЙ ТОЧНОСТИ ПОЗИЦИОНИРОВАНИЯ | 2016 |
|
RU2624773C1 |
| Задатчик микроперемещений | 1987 |
|
SU1513421A1 |
| УСТРОЙСТВО ЛИНЕЙНЫХ ПРЕЦИЗИОННЫХ ПЕРЕМЕЩЕНИЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1990 |
|
RU2017313C1 |
Изобретение относится к машиностроению и может быть использовано, например, в робототехнических устройствах для перемещения различных исполнительных органов. Целью изобретения является повышение точности позиционирования. Для этого подвижное звено, на котором может устанавливаться исполнительный орган и которое имеет возможность линейного перемещения относительно основания, поочередно подключается к приводу грубых (макро-) перемещений и к приводу точных (микро-) перемещений, расположенных на основании. Привод микроперемещений выполнен в виде охватывающего подвижное звено пакета полых пьезоэле- ментов. Этот привод механически связывается с подвижным звеном посредством управляемого фиксатора из пьезоэлемен- тов. Положение подвижного звена контролируется датчиком положения. Приводы перемещения подвижного звена, управляемый фиксатор и датчик положения соответствующим образом связаны с блоком управления. При большой ошибке положения подвижного звена логический элемент блока управления включает цепь привода грубых перемещений, а при уменьшении ошибки до определенной величины логический элемент отключает привод грубых перемещений и включает управляемый фиксатор и цепь привода точных перемещений. 3 ил. сл С
Фиг. 3
| Рука промышленного робота | 1982 |
|
SU1096095A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
