4
to 1
4
Изобретение относится к техничес-. КИМ средствам обучения и может быть использовано в автошколах и учебных комбинатах при подготовке водителей транспортных средство
Целью из.обретения является повыше ние эффективности обучения,
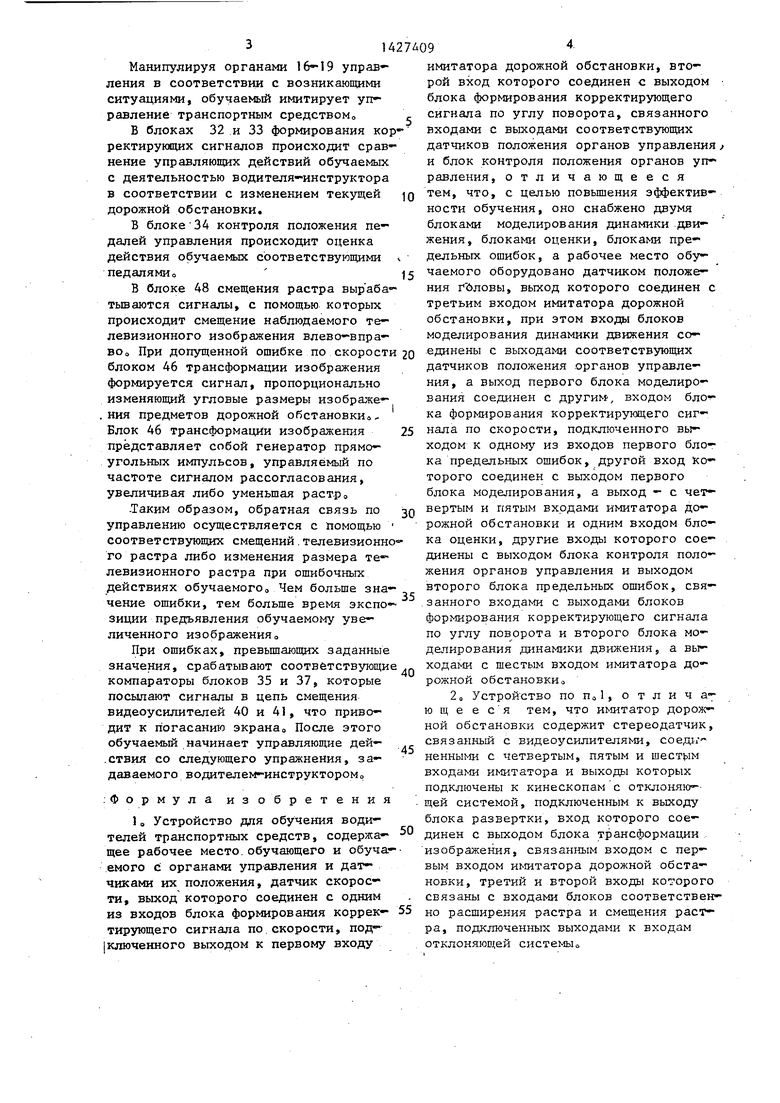
На фиг„1 представлена функцион - нальная блок- -схема у строй ста а г на фиго 2 « конструкция шлема со стерео- приемником.
Устройство представляет собой мно--- гоместный учебный автомобиль ( бус) с рабочим .местом 1, содержащим кресло 2 водителя«-инструктора (обуча- ющего), прибор11ый щиток 3, пульт 4 управления с элементами управления процессом обучения, стандартными ганами управления; рулевым колесом 5 j педалями акселератора 6 тормозом 7s педалью сцепления с рычагом 8 пере« ключения передач 9 оснащенными элект - рическими датчиками 9-12 их положе- ниЯо Рабочие ме.ста 13 обучаемых оборудо ваны каждое креслом 1 4s приборным пуль° том 15 с имитаторами приборов и стан дартными органами управления;, оснащенными датчиками 20«-23 их положения головными тeлeфoнa Jи 24 дат чином 25 положения головы обучаемого« Каждый механизм рулевого колеса 16 обучаемых снабжен нагрузочным блоком 26 о Автобус оснащен датчиком 27 ско рОСТИо .
I
Моделирующий уз ел-28 включает , 29 и 30 моделирования динамики дв5т жений, блок 3 управления нагрузочным устройством блоки 32 и 33 формирования корректирукяцих сигналов по углу поворота и по скорости, блок 34 роля положения органов управленияj блоки 35 и 36 предельных значений ошн бок блок 37 оценкиD
Имитатор дорожной обстановки содержит установленный над головой вО дителя-тинструктора стереодатчик 38, соединенный с малогабаритным стерео видеоконтрольным устройством 39, включающим вндеоусилитель правого изображения 40 и левого изображения 41 с кинескопами 42 и 43 с основными отклоняющими системами 44 и 45 j блок k.
46трансформации изображения, блок
47строчной и кадровой развертгки блок 48 смещения растра, катушки 49 и 50 дополнительной отклоняющей сие- темы блок S1 расширения растра.
0
5
0
5
0
5
0
5
0
5
Стереоскоп 39 содержит два кине скопа 42 и 4.3, специальные линзы 53 и 54 и призмы 55, скомпанованные в пластмассовом корпусе 56 о Кинескопы 42 и 43 крепятся к корпусу 56 посред ством металлического конуса 57 с .помощью пружин 58.
Для обеспечения эластичного крепле ния и защиты оптики кинескоп опирается на резт-п овую прокладку 59 Вся конструкция заключена в легкий защит - ный кожух 60о На,горловину каждого кинескопа 42 и 43 надеваются катушки смещения растра 61 (электромагниты) 8 расположенные по двум взаимно перпендикулярным осям Для уменьшения светорассеивания внутренняя полость стереоскопа 39 покрьюается черной эмалью с, Вся система крепится с помощью узла 62 на шлем 52, который устанавливается в транспортном средстве на специальном кронштейне, обеспечивающем возможность регулировки ее положения и свободное перемещение головы обучаемого в любой плоскости,- в том числе наклон головы дпя получения информации от приборов пульта 13
Блок 48 смещения телевизионного растра выполнен в виде дополнительной пары электромагнитов 53, устанавлива- емых вместо корректирующих постоянных электромагнитов на горловине -кинескопов 42 и 43 о
Устройство работает следующим об- разомо
. Обучаемые ра змещаются на рабочих . местах 13 расположенных в салоне многоместного учебного автомобиля, управляемого водителем инструктором, находящемся на своем рабочем месте .
По команде водителя-инструктора, транслируемой через головные телефоны 22s обучаемый приступает к управлению,, Водитель-инструктор информирует обучаемь Х о заданном режиме движения о направлении движения и об остановках.
Наблюдение-за изменением дорожной обстановки производится обучаемым с помощью стереоскопов 39 по двум самостоятельным телевизионным каналам, несущим информацию о правом и левом изображениях воспринимаемых соответственно левым и правым глазами обучае могОо При этом в зрительном анализаторе формируется объемная картина, адекватная реальному восприятию дорожной обстановкио
Манипулируя органами управ ления в соответствии с возникающими ситуациями, обучаемый имитирует yip- равлеиие транспортным средством
В блоках 32 .и 33 формирования корректирующих сигналов происходит срав иение управляющих действий обучаемых с деятельностью водителя-инструктора в соответствии с изменением текущей дорожной обстановки,
В блоке34 контроля положения педалей управления происходит оценка действия обучаемых соответствующими ч педалямио
В блоке 48 смещения растра выр аба- тьшаются сигналы, с помощью которых происходит смещение наблюдаемого телевизионного изображения влево-впра-
имитатора дорожной обстановки, второй вход которого соединен с выходом блока формирования корректирующего сигнала по углу поворота, связанного входами с выходами соответствующих датчиков положения органов управления и блок контроля положения органов управления, отличающееся тем, что, с целью повьппения эффективности обучения, оно снабжено двумя блоками моделирования динамики движения, блоками оценки, блоками предельных ошибок, а рабочее место обучаемого оборудовано датчиком положения г бловы, выход которого соединен с третьим входом имитатора дорожной обстановки, при этом входы блоков моделирования динамики движения со-
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер водителей транспортного средства | 1975 |
|
SU536505A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| Тренажер транспортного средства | 1981 |
|
SU1054829A1 |
| СПОСОБ ОБУЧЕНИЯ ВОЖДЕНИЮ БОЕВОГО ТРАНСПОРТНОГО СРЕДСТВА И ТРЕНАЖЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2709344C1 |
| Способ обучения приемам управления четырехколесным внедорожным мототранспортным средством (квадроциклом) и тренажер для его реализации | 2024 |
|
RU2830015C1 |
| Тренажер профессиональной подготовки оператора гусеничной машины | 2022 |
|
RU2798765C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ ОПЕРАТОРОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2024 |
|
RU2826147C1 |
| Учебное устройство для дозирования усилия на педаль сцепления транспортного средства при начале движения | 2022 |
|
RU2805237C1 |
| Тренажер для обучения сварщиков | 1986 |
|
SU1441446A1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
Изобретение относится к техническим средствам обучения водителей транспортных средств и позволяет повысить эффективность процесса обучения. Устройство представляет собой многоместный учебный автомобиль (автобус) с креслом водителя-инструктора, пультом и элементами управления процессом обучения, органами управления с электрическими датчиками их положения. Рабочие места обучаемых оборудованы пультами, имитаторами приборов и органами управления с датчиками, головными телефонами Тренажер содержит моделирующие блоки и имитатор дорожной обстановки в виде установленного над головой водителя- инструктора стереодатчика, соединен- . ного с малогабаритным стереовидео- контрольным блоком, включающим видеоусилители и кинескопы правого и левого изображения с отклоняющими системами На горловину каждого кинескопа надеваются катушки смещения раствора. Вся система крепится на шлем, которьй устанавливается на специальном кронштейне с возможностью регулировки ее положения от перемещения головы 1 ЗоПо ф-лы, 2 ил л с
25
воо При допущенной ошибке по скорости 20 единены с выходами соответствующих блоком 46 трансформации изображения формируется сигнал, пропорционально изменяющий угловые размеры изображе- . иия предметов дорожной обстановки - Блок 46 трансформации изображения представляет собой генератор прямоугольных импульсов, управляемый по частоте сигналом рассогласования, увеличивая либо уменьшая растр,
-Таким образом, обратная связь по управлению осуществляется с помощью соответствующих смещений. телевизионно го растра либо изменения размера телевизионного растра при ошибочных действиях обучаемого Чем больше значение ошибки, тем больше время экспозиции предьявления обучаемому увеличенного изображения
При ошибках, превьш1ающих заданные
30
35
датчиков положения органов управления, а выход первого блока моделиро вания соединен с другим, входом бл ка формирования корректирующего сиг нала по скорости, подключенного выходом к одному из входов первого бл ка предельных ошибок, другой вход К торого соединен с выходом первого блока моделирования, а выход - с че вертым и пятым входами имитатора до рожной обстановки и одним входом бл ка оценки, другие входы которого со динены с выходом блока контроля пол жения органов управления и выходом второго блока предельных ошибок, св .занного входами с выходами блоков формирования корректирующего сигнал по углу поворота и второго блока мо делирования динaмJiKи движения, а вы
значения, срабатывают соответствующие .,, ходами с шестым входом имитатора до45
компараторы блоков 35 и 37, которые посылают сигналы в цепь смещения видеоусилителей 40 и 41, что приводит к погасанию экрана После этого обучаемый начинает управляющие дей- .ствия со следующего упражнения, задаваемого водителем-инструктором,
.Формула изобретения
1 о Устройство для обучения водителей транспортных средств, содержащее рабочее место.обучающего и обуча- емого с органами управления и датчиками их положения, датчик скорости, выход которого соединен с одним из входов блока формирования коррек- 55 тирующего сигнала по.скорости, под- 1ключенного выходом к первому входу
рожной обстановкио
2а Устройство по , о т л и ч а- ю щ е е с я тем, что имитатор дорожной обстановки содержит стереодатчик, связанный с видeoycшIИтeля ш, соедк ненными с четвертым, пятым и fflecTt iM входами имитатора и выходы которых подключены к кинескопам с отклоняю-- . щей системой, подключенным к выходу блока развертки, вход которого сое- динен с выходом блока трансформации ,. изображения, связанным входом с первым входом имитатора дорожной обстановки, третий и второй входы которого связаны с входами блоков соответствен но расширения растра и смещения растра, подключенных выходами к входам отклоняющей системыо
единены с выходами соответствующих
датчиков положения органов управления, а выход первого блока моделирования соединен с другим, входом бло ка формирования корректирующего сигнала по скорости, подключенного выходом к одному из входов первого блока предельных ошибок, другой вход Которого соединен с выходом первого блока моделирования, а выход - с четвертым и пятым входами имитатора дорожной обстановки и одним входом блока оценки, другие входы которого соединены с выходом блока контроля положения органов управления и выходом второго блока предельных ошибок, свя- занного входами с выходами блоков формирования корректирующего сигнала по углу поворота и второго блока моделирования динaмJiKи движения, а вы5
5
рожной обстановкио
2а Устройство по , о т л и ч а- ю щ е е с я тем, что имитатор дорожной обстановки содержит стереодатчик, связанный с видeoycшIИтeля ш, соедк ненными с четвертым, пятым и fflecTt iM входами имитатора и выходы которых подключены к кинескопам с отклоняю-- . щей системой, подключенным к выходу блока развертки, вход которого сое- динен с выходом блока трансформации ,. изображения, связанным входом с первым входом имитатора дорожной обстановки, третий и второй входы которого связаны с входами блоков соответственно расширения растра и смещения растра, подключенных выходами к входам отклоняющей системыо
Редактор ЕоКопча
Фиг. г
Составитель ЛоРезникова Техред М.Ходанич
Корректор М.Шароши
| Тренажер водителей транспортного средства | 1975 |
|
SU536505A1 |
