УСТРОЙСТВО ДЛЯ МЕХАНИЗИРОВАННОЙ ЗАСТРОПКИ И ОТСТРОПКИ КОНТЕЙНЕРОВ
Заявлено б мая 1961 г. за Ло 729285/27 в Комитет по делам изобретений и открытий при Совете Министров СССР
Опубликовано в «Бюллетенб изобретений № 22 за 1961 г.
Известны устройства для механизированной застропкп и отстропки контейнеров, монтируемые в грузовой обойме грузоподъемного механизма, на которой устанавливается электропривод поворота поднятого груза, а также подвижная и неподвижная в вертикальном направлении траверсы перемещения захватных органов устройств.
Отличительной особенностью описываемого устройства является го, что оно оборудовано двумя горизонтальными штангами, концы которых посредством жестких тяг и упругих стержней соединены соответственно с неподвижной и подвижной траверсами, а на контейнере применены грузозахватные устройства, выполненные в виде жестких вертикальных попарно обращенных друг к другу крюков, наклонные грани которых образуют открытый двугранный угол. Конструктивные особенности устройства дают возможность повысить его эффективность.
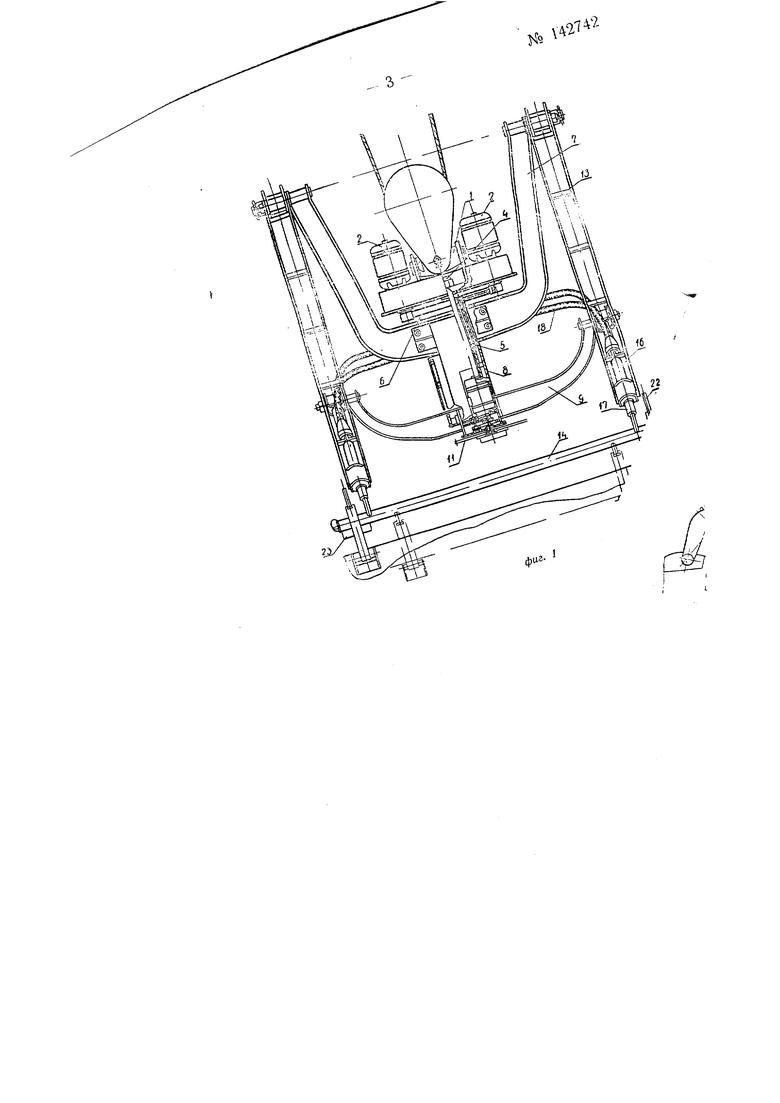
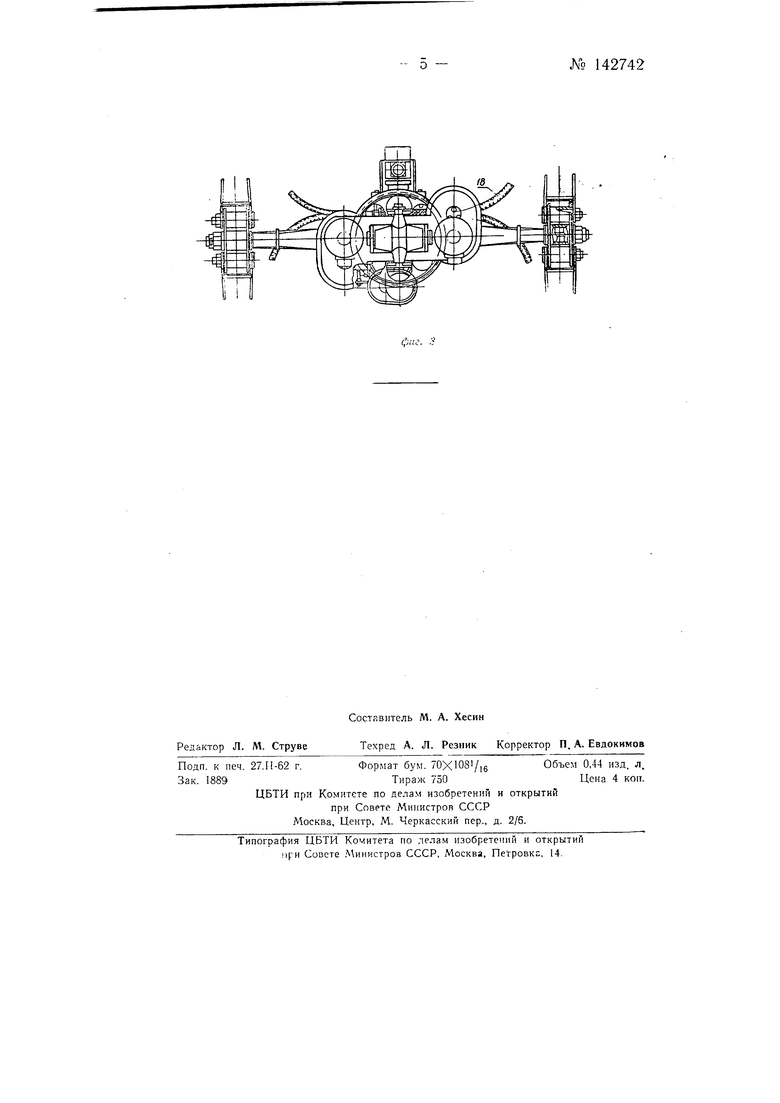
На фиг. 1 изображено устройство для механизированной застройки и отстропки контейнеров, вид сбоку; на фиг. 2 - то же, вид с торца; на фиг. 3 - то же, в плане.
На щарнирно установленной грузовой обойме 1 грузового подъемного механизма монтируются электроприводы 2 поворота поднятого груза 3 (контейнера) К; обойме крепится ось 4, на которую посредством радиальных и упорного подшипника опирается полый вал 5, несущий на верхнем конце зубчатое колесо 6, взаимодействуюшее с электроприводом поворота груза. Кроме того, на полом валу устанавливаются неподвижная траверса 7 и полый винт 8, несущий на себе вертикально перемещающуюся траверсу 9 упругих стержней. На нижнем конце полого винта установлено зубчатое колесо // механизма 12 отстропки.
При работе механизма отстропки посредством шестерни )/ приводится во вращательное движение полый винт 8, сообщающий гайке тра№ 142742 - 2 версы 9 поступательное движение. Траверса 9 через упругие стержни 10 поворачивает относительно осей жестких тяг У5 захватные штанги 14.
Тяги 13 подвешиваются на валиках 15 непрдвижой траверсы. Гайки 16 жестких тяг соединяются в нижней своей части с винтами 17 захватных штанг, а в верхней части - с гибкими валами 18 механизма 19 подъема захватных штанг. Механизм подъема захватных штанг, выполненный в виде червячного редуктора, посредством гибких валов через гайки 16 жестких тяг и винты 17 перемешает штанги. К цапфам подвижной траверсы 9 шарнирно крепятся упругие оборудованные двумя пружинами разной жесткости телескопические тяги, вторые концы которых шарнирно сочленены с нижними концами тяг неподвижной траверсы.
При заданных координатах захватных штанг положение гайки траверсы 9 зависит от длины упругих стержней. Положение траверсы 9 на центральной оси 4 может регулироваться. Упругие стержни обеспечивают автоматическую застройку захватных штанг за крюки 20 контейнера 3.
Перед застропкой захватные штанги опускаются на наклонные поверхности попарно обращенных друг к другу крюков контейнера и за счет сжатия заключенных в телескопические стаканы нижних пружин 21 входят в зацепление с крюками, обеспечивая застройку штанг.
Углы наклона поверхностей крюков выбираются с учетом легкого скольжения по ним захватных штанг. Для более йлавной посадки захватных штанг крюки контейнеров оборудуются плоскими пружинами 22, а захватные штанги-плоскими пружинами 23. Расцепление (отстропка) захватных штанг и крюков контейнера осушествляется механизмом 12 отстропки, поднимающим траверсы 9. После отстройки концевой выключатель, установленный на траверсе 9, отключает механизм 12.
Описываемое устройство может быть подвешено к любому крану и обеспечивает застропку и отстройку контейнеров, установленных в различных положениях.
Предмет изобретения
Устройство для механизированной застройки и отстропки контейнеров, монтируемое в грузовой обойме грузоподъемного механизма, на которой жестко крепится электропривод поворота поднятого груза вокруг вертикальной оси с неподвижной и подвижной в вертикальном направлении траверсами для привода захватных органов устройства, отличаюш,ееся тем, что, с целью повышения эффективности устройства, оно снабжено горизонтальными грузозахватными штангами, концы которых шарнирно соединены с неподвижной траверсой жесткими тягами, а с подвижной траверсой-упругими стержнями, упругие элементы которых выполнены из набора цилиндрических пружин, заключенных в телескопически соединенные стаканы, при этом на контейнере применены грузозахватные устройства, выполненные в виде жестких вертикальных крюков, попарно обращенных друг к другу так, что их внешние наклонные грани образуют открытый двухгранный тол.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МЕХАНИЗИРОВАННОЙ ЗАСТРОПКИ И ОТСТРОПКИ КОНТЕЙНЕРОВ | 1965 |
|
SU177059A1 |
| Захватное устройство для контейнеров | 1973 |
|
SU502826A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ОТСТРОПКИ УНИВЕРСАЛЬНЫХ КОНТЕЙНЕРОВ | 1971 |
|
SU296703A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО для КОНТЕЙНЕРОВ | 1971 |
|
SU315682A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Захватное устройство для контейнеров с цапфами | 1980 |
|
SU901236A1 |
| Приспособление для строповки крупногабаритных конструкций | 1954 |
|
SU100935A1 |
| Захватное устройство для мягких контейнеров | 1991 |
|
SU1781159A1 |
| УСТРОЙСТВО для ПОДЪЕМА И БАЛАНСИРОВКИ ГРУЗА | 1973 |
|
SU404757A1 |
| АВТОСТРОП ДЛЯ ЗАХВАТА КОНТЕЙНЕРОВ | 2008 |
|
RU2387596C1 |