1
Изобретение относится к области механизации строительства и может быть применено при производстве монтажных и погрузочноразгрузочных работ.
Известны устройства для подъема и балансировки груза, преимущественно крупноразмерных строительных конструкций, содержащие перемещающиеся по стреле крана связанные между собой грузовые тележки с крюковыми подвесками, имеющими индивидуальные приводы механизма подъема.
Однако в таких устройствах грузовые тележки расположены параллельно друг другу на стреле крана, что исключает возможность изменения расстояния между тележками, и, следовательно, не позволяет применять это устройство для балансировки крупноразмерных грузов при их подъеме без использования балансировочных траверс, применение которых уменьшает полезную грузоподъемность крана.
Цель изобретения - упрощение процесса балансировки и регулирования положения груза.
Для этого грузовые тележки, расположенные на стреле крана последовательно одна за другой в одной плоскости, соединены между собой посредством жесткой связи, снабженной реверсивным электроприводом, а обоймы крюков соединены телескопической штангой
с укрепленным на ней датчиком горизонтальности, связанным с приводом грузовых лебедок крюковых подвесок, оборудованных датчиками вертикальности, включенными в цепь пускового устройства привода жесткой тяги.
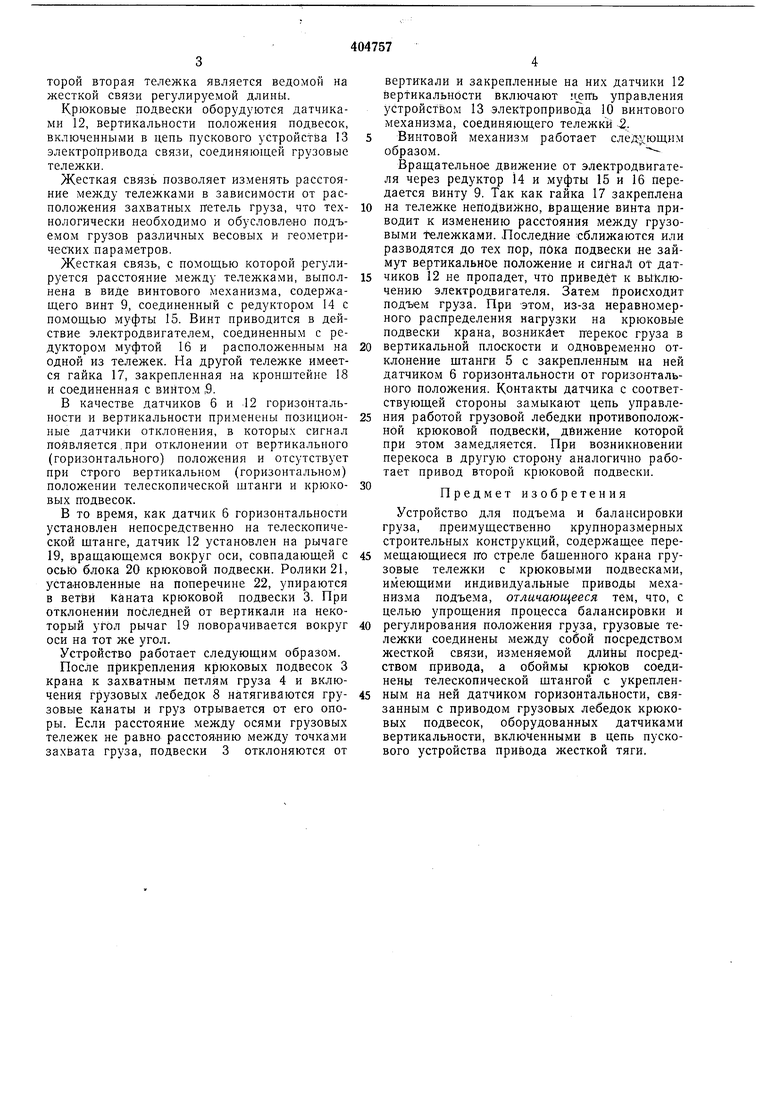
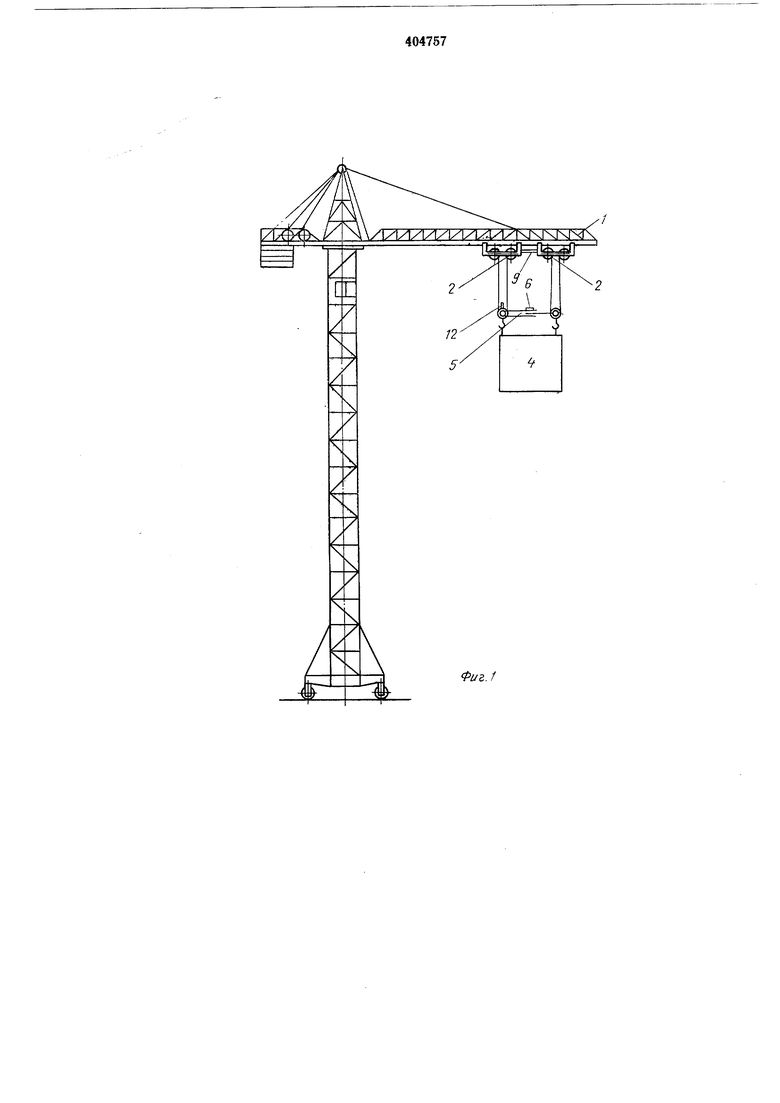
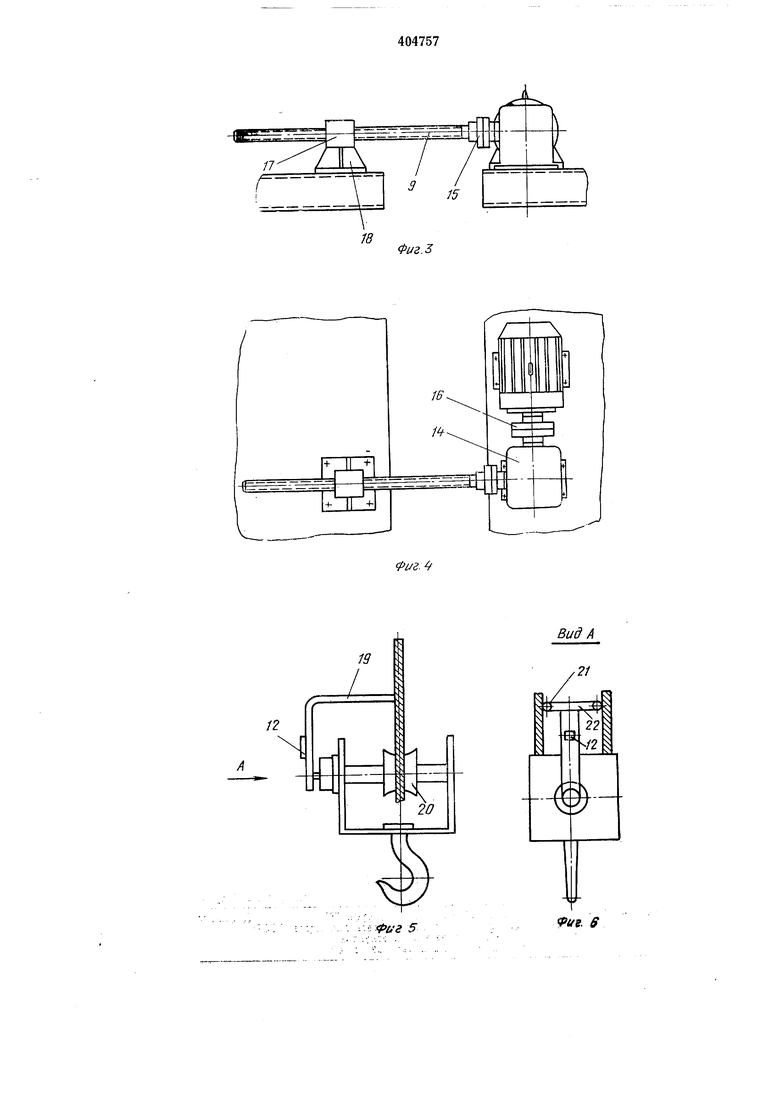
На фиг. 1 изображено предлагаемое устройство, общий вид; на -фиг. 2 - схема работы устройства; на фиг. 3 - узел жесткой связи тележек, вид сбоку; на фиг. 4 - то же, вид сверху; на фиг. 5 - схема установки датчика вертикальности; на фиг. 6 - вид А на фиг. 5
Устройство для подъема и балансировки груза включает расположенные на стреле краиа 1 в одной плоскости две грузовые тележки 2 с крюковыми подвесками 3, к которым присоединяется груз 4. Грузовые тележки и крюковые подвески применяют в обычном для башенных кранов исполнении. Крюковые подвески соединены телескопической штангой 5, на которой закреплен датчик 6 горизонтальности положения груза. Крюковые подвески регулируются при помощи управляемых устройством 7 грузовых лебедок 8. Грузовые тележки соединены между собой при помощи жесткой связи - винта 9, имеющей реверсивный электропривод 10, причем к тросу 11 механизма передвижения тележек крана непосредственно присоединена только одна грузовая тележка, по отношению к которой вторая тележка является ведомой на жесткой связи регулируемой длины.
Крюковые подвески оборудуются датчиками 12, вертикальности положения подвесок, включенными в цепь пускового устройства 13 электропривода связи, соединяющей грузовые тележки.
Жесткая связь позволяет изменять расстояние между тележками в зависимости от расположения захватных петель груза, что технологически необходимо и обусловлено подъемом грузов различных весовых и геометрических параметров.
Жесткая связь, с помощью которой регулируется расстояние между тележками, выполнена в виде винтового механизма, содержащего винт 9, соединенный с редуктором 14 с помощью муфты 15. Винт приводится в действие электродвигателем, соединенным с редуктором муфтой 16 и расположенным на одной из тележек. На другой тележке имеется гайка 17, закрепленная на кронштейне 18 и соединенная с винтом ,9.
В качестве датчиков 6 и 12 горизонтальности и вертикальности применены позиционные датчики отклонения, в которых сигнал появляется.при отклонении от вертикального (горизонтального) положения и отсутствует при строго вертикальном (горизонтальном) положении телескопической щтанги и крюковых подвесок.
В то время, как датчик 6 горизонтальности установлен непосредственно на телескопической щтанге, датчик 12 установлен на рычаге 19, вращающемся вокруг оси, совпадающей с осью блока 20 крюковой подвески. Ролики 21, установленные на поперечине 22, упираются в ветви Каната крюковой подвески 3. При отклонении последней от вертикали на некоторый угол рычаг 19 поворачивается вокруг оси на тот же угол.
Устройство работает следующим образом.
После прикрепления крюковых подвесок 3 крана к захватным петлям груза 4 и включения грузовых лебедок 8 натягиваются грузовые канаты и груз отрывается от его опоры. Если расстояние между осями грузовых тележек не равно расстояаию между точками захвата груза, подвески 3 отклоняются от
вертикали и закрепленные на них датчики 12 верфикальнбсти включают -тепь управления устройством 13 электропривода 10 винтового механизма, соединяющего тележки 2,. Винтовой механизм работает след- ющим образом.
Вращательное движение от электродвигателя через редуктор 14 и муфты 15 и 16 передается винту 9. Так как гайка 17 закреплена
на тележке неподвижно, вращение винта приводит к изменению расстояния между грузовыми тележками. Последние сближаются или разводятся до тех пор, пока подвески не займут вертикальное положение и сигнал от датчиков 12 не пропадет, что приведет к выключению электродвигателя. Затем происходит подъем груза. При этом, из-за неравномерного распределения нагрузки на крюковые подвески крана, возникает перекос груза в
вертикальной плоскости и одновременно отклонение штанги 5 с закрепленным на ней датчиком 6 горизонтальности от горизонтального положения. Контакты датчика с соответствующей стороны замыкают цепь управления работой грузовой лебедки противоположной крюковой подвески, движение которой при этом замедляется. При возникновении перекоса в другую сторо-ну аналогично работает привод второй крюковой подвески.
,-,
Предмет изобретения
Устройство для подъема и балансировки груза, преимущественно крупноразмерных строительных конструкций, содержащее перемещающиеся по стреле бащенного крана грузовые тележки с крюковыми подвесками, имеющими индивидуальные приводы механизма подъема, отличающееся тем, что, с целью упрощения процесса балансировки и
регулирования положения груза, грузовые тележки соединены между собой посредством жесткой связи, изменяемой длИНы посредством привода, а обоймы крюков соединены телескопической щтангой с укрепленным на ней датчиком горизонтальности, связанным с приводом грузовых лебедок крюковых подвесок, оборудованных датчиками вертикальности, включенными в цепь пускового устройства привода жесткой тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| БАШЕННЫЙ КРАН | 2006 |
|
RU2307783C1 |
| ПЛАВУЧЕЕ ПОДЪЕМНОЕ СРЕДСТВО БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2006 |
|
RU2320529C1 |
| Башенный кран | 1973 |
|
SU628080A1 |
| МОСТОВОЙ КРАН | 1970 |
|
SU286167A1 |
| Устройство для гашения колебаний грузовой подвески крана | 1975 |
|
SU587085A1 |
| Мостовой кран | 1978 |
|
SU874583A1 |
| Консольный складывающийся кран | 1978 |
|
SU753780A1 |
| ЖЕЛЕЗНОДОРОЖНЫЙ КРАН, ПРЕИМУЩЕСТВЕННО ДЛЯ ВОССТАНОВИТЕЛЬНЫХ РАБОТ | 1998 |
|
RU2155155C1 |
| Грузовая тележка мостового крана | 1990 |
|
SU1766826A1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |

Фиг.1
Фиг.З
12
N
А
22
1 S/2
