Изобретение относится к области поДъемногранопортной техники и касается конструкции захватных устройств, применяемых для выполнения погрузочно-разгрузочных работ с контейнерами.
Известны подоб-ные устройства, содержащие навешиваемую на блочную подвеску грузоподъемного механизма раму, на которой смонтированы перемещающиеся по продольным направляющим каретки, несущие захватные органы, взаи модействующие с рымами жонтейнеров, и механизм наводки, укрепленный на раме. Однако известные устройства не обеспечивают надежной и быстрой застройки контейнеров или требуют их оборудования снециальными грузоподъемными устройствами, например в виде крюков, устанавливаемых на крыще.
Цель настоящего изобретения - повысить производительность и надежность работы захватного устройства для контейнеров, а также обеспечить застропку контейнеров различных типоразмеров. Для этого механизм наводки выполнен в виде разнесенных относительно продольной оси рамы направляющих, щарнирно укрепленных на щтанге, связанной через толкающие рычаги одним плечом с двуплечего поворотного рычага, другое плечо которого соединено с подвижной тягой, перемещающейся при упоре кареток в хвостовик одного
ИЗ щарнирно укрепленных на подвижной тяге храповиков, взаимодействующих с неподвижными зубчатыми рейками, а захватные органы выполнены в виде перемещающихся в вертикальных направляющих крюков, обращенных зевами наружу относительно центра устройства и входящих под действием пружин в рымный карман контейнера для зацепления с рымом.
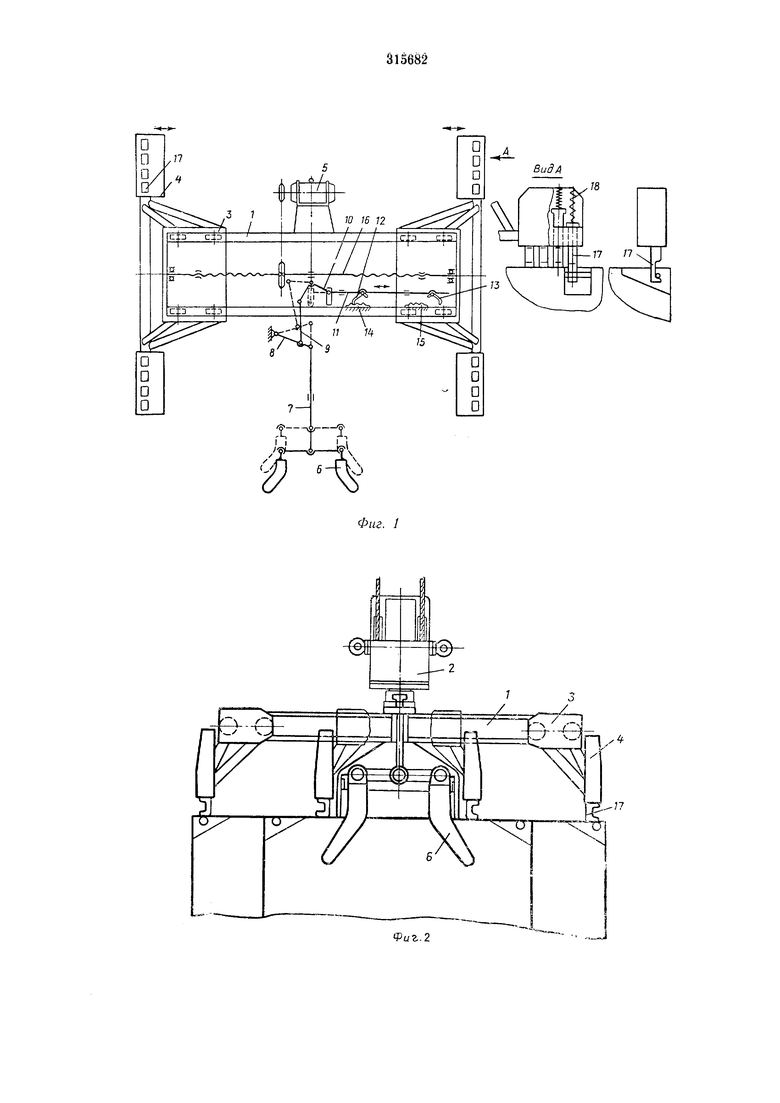
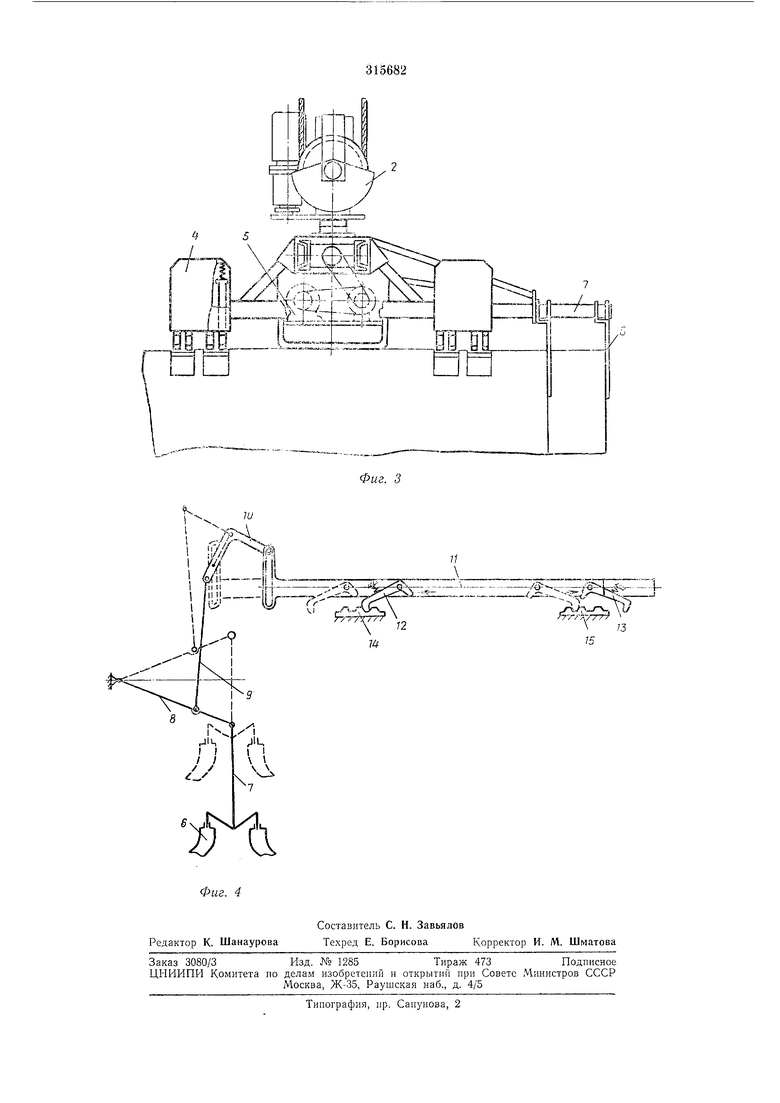
На фиг. 1 изображена кинематическая схема предлагаемого захватного устройства; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, вид с торца; на фиг. 4 - схема механизма наводки.
На раме 1, жестко сочлененной с блочной подвеской 2 грузоподъемного механизма, смонтированы две подвижные каретки 3 с захватными органами 4 и электропривод 5 для перемещения карето:к, являющийся одновременно и приводом механизма наводки. Механизм наводки состоит из разнесенных направляющих 6, шарнирно укрепленных на щтанге 7, связаной через толкающие рычаги S и 9 с одним плечом двуплечего поворотного рычага W, второе плечо Которого соединено с подвижной тягой 11, перемещающейся при упоре кареток в хвостовик одного из щарнирно укрепленных на подвижной тяге храповиков 12 и 13, взаимодействующих с неподвижными зубчатыми рейками 14 и 15, установленными на раме в положении, соответствующем типоразмеру захватываемого контейнера.
Каретки перемещаются по .продольным направляющим рамы с помощью электропривода 5 н випта 16. На концах кареток смонтированы захватные органы, каждый из которых состоит из перемещающихся в вертикальных направляющих «рюков 17, подпружиненных с помощью пружин 18 и обращенных своими зевами наружу относительно центра устройства. Одна часть крюков, расположенных ближе к продольной оси устройства, предназначена для застройки одного типа контейнера, например трехтонного, а другая часть - для застропки другого типа контейнера, например пятитонного. Наличие нескольких крюков в одном захватном органе обеспечивает гарантированную застронку контейнеров, рымные карманы которых размещены с отклонением от установленных размеров.
Захватное устройство работает следующим образом.
При необходимости застропить трехтонный контейнер каретки 3 перемещаются к центру до предела, причем одна из них, перемещаясь, упирается в хвостовик храповика 12 и выводит его из зацепления с рейкой 14, передвигая при дальнейшем движении тягу 11. Тяга через рычаги 10, 9 VI 8 перемещает щтангу 7 с направляющими 6 до установленного положепия от продольной оси захвата, равного половине длины трехтонного контейнера. Обратный сдвиг направляющих 6 под действием случайных ударов предотвращается храповиком 13, упирающимся в рейку /5.
После |Сдви;га кареток устройство прижимается направляющими 6 к торцовой стенке контейнера и опускается на его крыщу. При этом крюки 17 под действием веса устройства перемещаются вверх по направляющим, сжимая пружины 18. При раздвигании кареток один или два крюка из каждого захватного органа под действием пружин и собственного веса входят в рымный карман контейнера и скользят по его дну до упора в рым, причем во Время застропки трехтонного контейнера и перемещения -кареток в зоне, ограниченной его размерами, направляющие остаются в фиксированном положени. Затем производится подъем устройства вместе с контейнером. Отстропка осуществляется путем перемещения
кареток к центру, в результате чего крюки выходят из зацепления с рымами.
Для застропки пятитонного контейнера, имеющего другие габаритные размеры и расстояния между рымами, производится раздвижение каретки до предела. При этом одна из кареток, упираясь в хвостовик храповика 13, выводит его из зацепления с рейкой 15, передвигая при дальнейшем движении тягу
11, которая через рычаги 10, 9 и 8 выдвигает штангу 7 с направляющими 6 на расстояние от центра устройства, равное половине ширины пятитонного контейнера. Обратный сдвиг направляющих предотвращается храновиком 12, упирающимся в зубцы рейки М. Перед опусканием захвата на -крыщу пятитонного контейнера каретки перемещаются к центру на 250-300 мм, причем направляющие 6 остаются на месте.
Затем операции по застропке и отстропке выполняются таким же образом, как и при работе с трехтонным контейнером.
Предмет изобретения
Захватное устройство для контейнеров, содержащее навешиваемую на блочную (нодвеску грузоподъемного механизма раму, на которой смонтированы перемещающиеся по продольным направляющим каретки, несущие
захватные органы, взаимодействующие с рымами контейнеров, и механизм наводки, укрепленный на раме, отличающееся тем, что, с целью повышения производительности, надежности в работе и обеспечения возможности
застропки контейнеров различных типоразмеров, механизм наводки выполнен в виде разнесенных относительно продольной оси ра.мы направляющих, шарнирно укрепленных на штанге, связанной через толкающие рычаги с
одни.м плечо.м двуплечего поворотного рычага, другое плечо которого соединено с подвижной тягой, перемещающейся при упоре кареток в хвостовик одного из шарнирно укрепленных на подвижной тяге храповиков, взаимодействующих с неподвижными зубчатыми рейками, а каждый из захватных органов выполнен в виде перемещающихся в вертикальных направляющих крюков, обращенных зевами наружу относительно центра устройства и входящих под действием пружин в рымный карман контейнера для зацепления с рымом.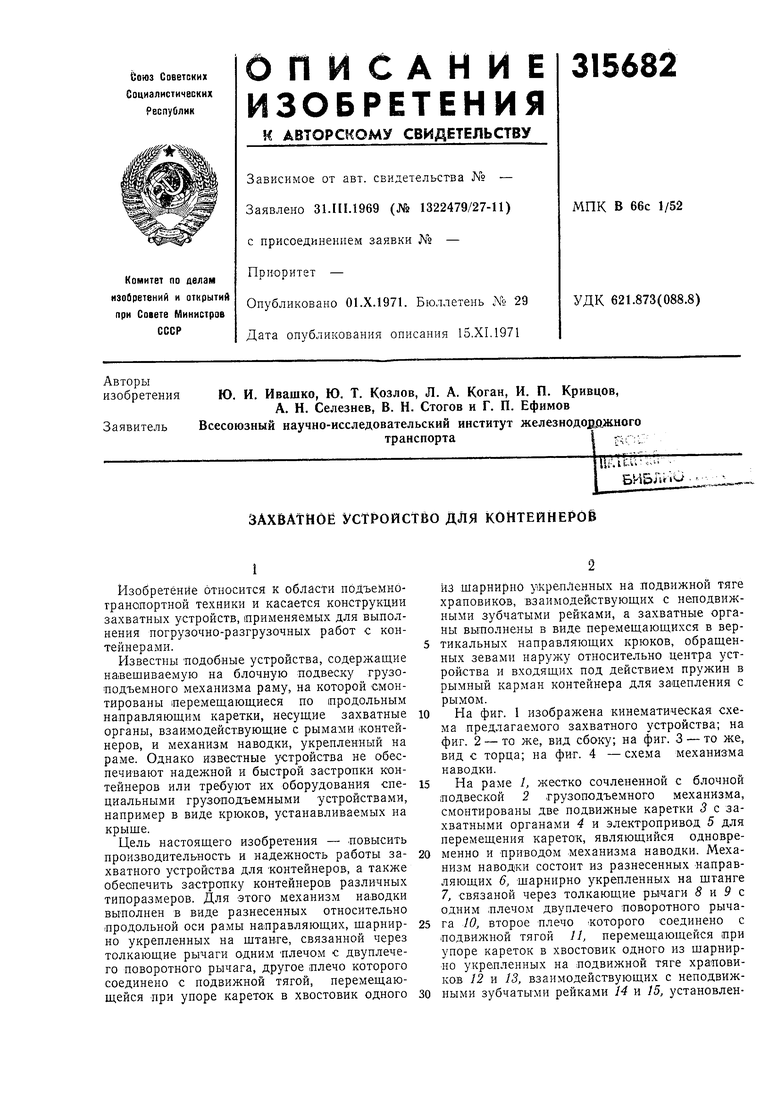

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для контейнеров | 1978 |
|
SU765185A1 |
| Грузозахватное устройство | 1989 |
|
SU1720986A1 |
| АВТОСТРОП ДЛЯ ЗАХВАТА КОНТЕЙНЕРОВ | 2008 |
|
RU2387596C1 |
| Захватное устройство для контейнеров | 1980 |
|
SU937314A2 |
| Захватное устройство для контейнеров | 1989 |
|
SU1726356A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Захватное устройство для изделий с петлями | 1981 |
|
SU1096189A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Транспортное средство-самопогрузчик | 1984 |
|
SU1204423A1 |
| Устройство для автоматической застропки и отстропки универсальных контейнеров | 1977 |
|
SU686974A2 |
. .J
Фиг.2
Ti
-r
JJ..J JT-Л««
JjffiOI
