(54) ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ С ЦАПФАМИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для контейнера с цапфами | 1981 |
|
SU1020356A1 |
| Захватное устройство для контейнеров с цапфами | 1982 |
|
SU1054275A1 |
| Захватное устройство для контейнеров с цапфами | 1975 |
|
SU614001A1 |
| Захват-кантователь для контейнеров с цапфами | 1984 |
|
SU1221178A1 |
| Захватное устройство для кон-ТЕйНЕРОВ C цАпфАМи | 1979 |
|
SU831710A1 |
| Захватное устройство для контейнеров с цапфами | 1983 |
|
SU1221853A1 |
| Захватное устройство для полых кольцевых изделий | 1978 |
|
SU1022934A1 |
| Захватное устройство для контейнеров | 1979 |
|
SU802163A1 |
| Захватное устройство для контей-HEPOB | 1979 |
|
SU816932A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
1
Изобретение относится к грузозахватным устройствам.
Известно захватное устройство для контейнеров с цапфами, содержащее траверсу с подвешенными к ней тягами, снабженными на концах захватными крюками 1.
Однако известное устройство требует значительных затрат ручного труда при работе и не обеспечивает надежного удержания контейнера.
Известно также захватное устройство для контейнеров с цапфами, содержащее траверсу с жестко закрепленными направляющими, расположенными между щарннрно подвещеннымн к траверсе жесткими тягами, на концах которых выполнены отверстия типа «замочная скважина 2.
Недостатком известного устройства является неудобство манипулирования приводами, поскольку они находятся на больщой высоте при работе с контейнерами.
Цель изобретения - обеспечение автоматизации дистанционной застропки и отстропки контейнера.
Указанная цель достигается за счет того, что каждая направляющая снабжена выдвижной вилкой, шарнирно соединенной
с тягой рычагом, и фиксатором, взаимо-. действующим с вилкой.
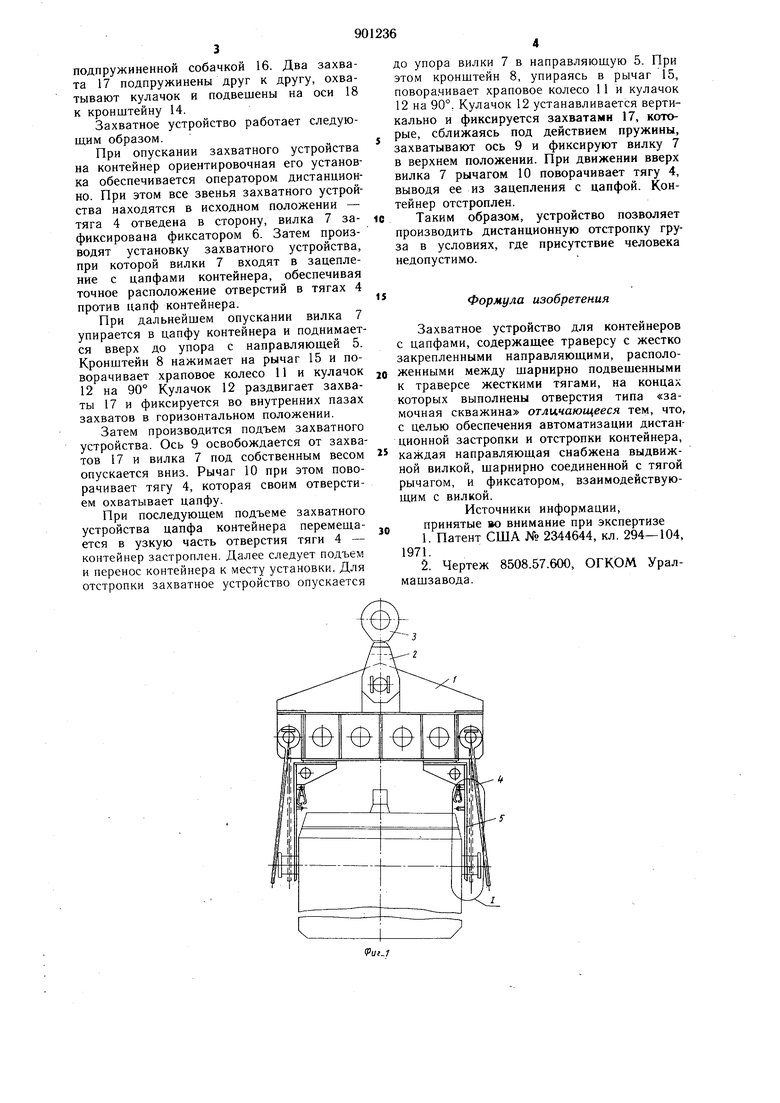
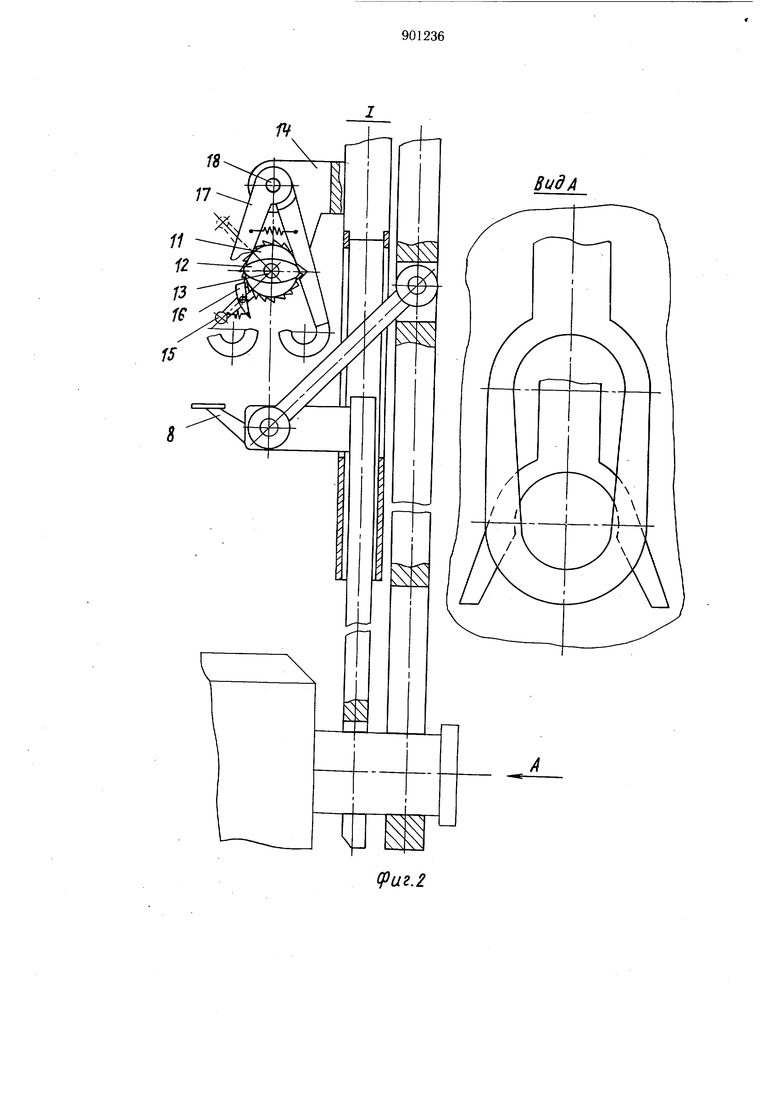
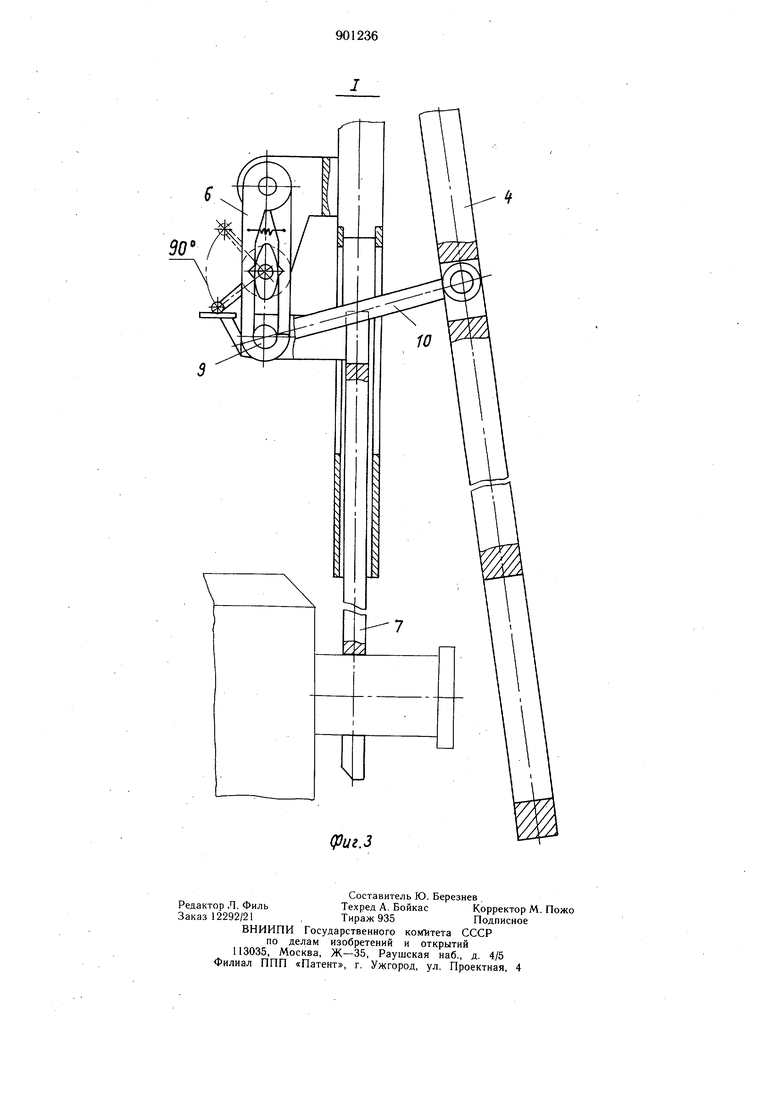
На фиг. 1 изображено захватное устройство, общий вид; на фиг. 2 - узел I на фиг. 1 (положение элементов устройства, 5 когда контейнер застроплен); на фиг. 3 - то же, положение элементов устройства, когда контейнер отстроплен (исходное положение).
Захватное устройство содержит траверсу 1, штангу 2 с проушиной 3 для. навешивания на крюк крана, жесткие тяги 4, шарнирно подвешенные к траверсе 1, жестко соединенные с траверсой 1 направляющие 5 с фиксатором 6.
Направляющая 5 снабжена на нижнем 15 конце выдвижной вилкой 7, взаимодействующей с цапфой контейнера. На верхнем конце вилки 7 установлен кронштейн 8 с осью 9, шарнирно соединенной рычагами 10 с тягой 4, осью 9 вилка 7 взаимодействует с фиксатором 6. Фиксатор 6 состоит из храпового колеса 11 и эллипсообразного кулачка 12, жестко закрепленного на валу 13, установленном на кронштейне 14, прикрепленном к направляющей 5. На валу 13 шарнирно установлен рычаг 15 с подпружиненной собачкой 16. Два захвата 17 подпружинены друг к другу, охва тывают кулачок и подвешены на оси 1 к кронштейну 14. Захватное устройство работает следуюш,им образом. При опускании захватного устройства на контейнер ориентировочная его установка обеспечивается оператором дистанционно. Прн этом все звенья захватного устройства находятся в исходном положении - тяга 4 отведена в сторону, вилка 7 зафиксирована фиксатором 6. Затем производят установку захватного устройства, при которой вилки 7 входят в зацепление с цапфами контейнера, обеспечивая точное расположение отверстий в тягах 4 против цапф контейнера. При дальнейшем опускании вилка / упирается в цапфу контейнера и поднимается вверх до упора с направляющей 5. Кронштейн 8 нажимает на рычаг 15 и поКпонштейн 8 нажимает на рыча, lu и „v.шТчТвает колесо 11 и кулачок ,,т,ллл1111 Т1 аипк 12на 90° Кулачок 12 раздвигает захваты 17 и фиксируется во внутренних пазах захватов в горизонтальном положении. Затем производится подъем захватного устоойства Ось 9 освобождается от захваустройства исьсобственным весом опускается вниз. Рычаг 10 при этом поворачивает тягу 4, которая своим отверстием охватывает цапфу. При последующем подъеме захватного устройства цапфа контейнера перемещается в узкую часть отверстия тяги 4 - контейнер застроплен. Далее следует подъем П lV, Jtiv- I jj-jiJ - - -- - - гт и перенос контейнера к месту установки. Для отстропки захватное устройство опускается о упора вилки 7 в направляющую 5. При этом кронштейн 8, упираясь в рычаг 15, поворачивает храповое колесо 11 и кулачок 12 на 90°, Кулачок 12 устанавливается вертикально и фиксируется захватами 17, которые, сближаясь под действием пружины, захватывают ось 9 и фиксируют вилку 7 в верхнем положении. При движении вверх вилка 7 рычагом 10 поворачивает тягу 4, выводя ее из зацепления с цапфой. Контейнер отстроплен. Таким образом, устройство позволяет производить дистанционную отстропку груза в условиях, где присутствие человека недопустимо. Формула изобретения Захватное устройство для контейнеров с цапфами, содержащее траверсу с жестко закрепленными направляющими, расположенными между шарнирно подвешенными к траверсе жесткими тягами, которых выполнены отверстия типа «замочная скважина отличающееся тем, что, с целью обеспечения автоматизации дистанционной застропки и отстропки контейнера. цииииип .Dav-.v.- ..г--г каждая направляющая снабжена выдвижной вилкой, шарнирно соединенной стягом рычагом, и фиксатором, взаимодействующим с вилкой. Источники информации, принятые во внимание при экспертизе 1.Патент США № 2344644, кл. 294-104, 2.Чертеж 8508.57.600, ОГКОМ Уралмашзавода.
(раг,2
