Изобретение относится к машиностроению, а именно к средствам контроля зубчатых колес.
Цель изобретения - расширение номенклатуры контролируемых колес и повышение точности путем обеспечения воз- йожности снижения паразитных гармоник k выходном сигнале.
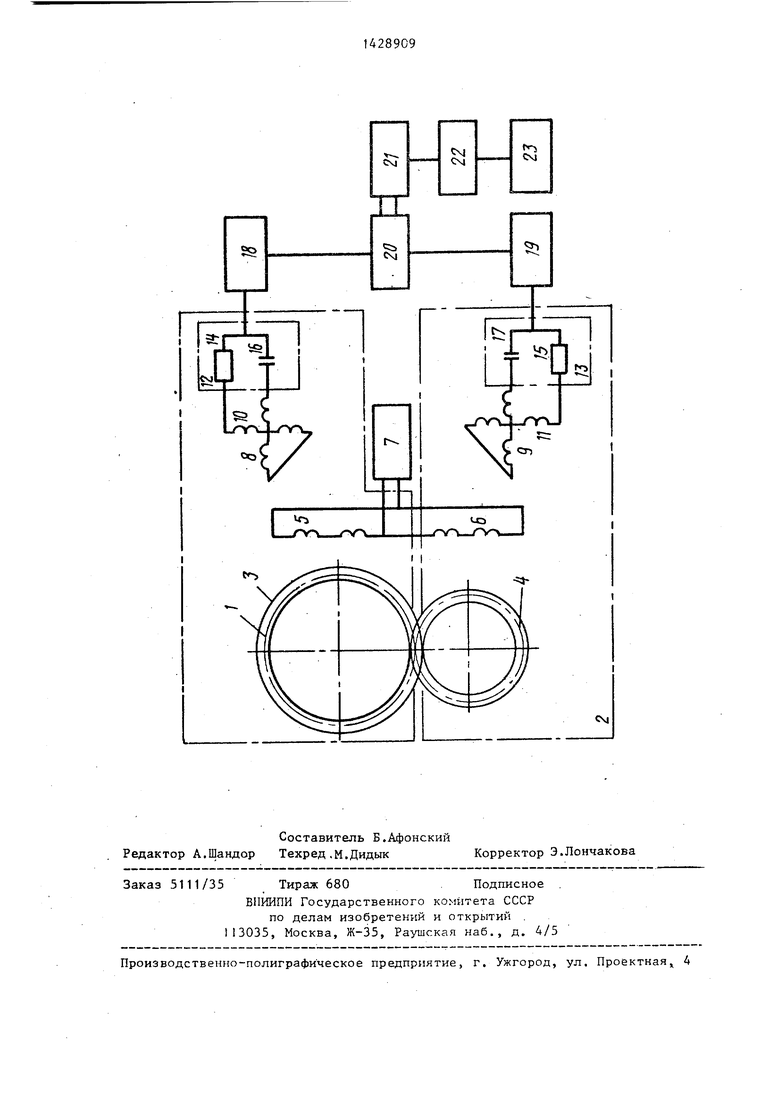
На чертеже показана принципиальная схема предлагаемого устройства.
Устройство содержит преобразователи 1 и 2 угла поворота колеса и шестерни контролируемой зубчатой пары показана) выполненные в виде зуб- атых роторов 3 и 4, роль которых вы- олняют контролируемые зубчатые коле- Ьо и шестерня, и статоров в виде секторов (не показаны), в пазах которых |)асположены контролируемые обмотки $ и 6 возбуждения, соединенные с ис- {очником 7 питания высокой частоты, фыходные синусораспределенные обмотки $ и 9 и косинусораспределенные обмот- и 10 и 11 расположены в тех же пазах соответствующих статоров таким образом, что их число витков пропорцио- . нально синусу и косинусу угла поворота ротора 3 и 4, обмотки 8,9 и 10,11 подключены к блокам 12 и 13 преобразования сигналов выполненным в виде резистором 14 и 15 и емкостей 16 и 17. Выходы блоков 12 и 13 преобразования подключены к входам предварительных усилителей-ограничителей 18 и 19, выходы усилителей-ограничителей соединены с входами фильтра 20, соединенного последовательно с фазовым детектором 21, усилителем 22 и с ре- Гистрирующим прибором 23.
Устройство работает следующим об- разом
При вращении роторов 3 и 4, роЛь которых выполняют контролируемые зуб- чатые колесо и шестерня, в выходных обмотках 8 , 9 и 10, 11 находятся ам- Плитудно-модулированные сигналы, амплитуды которых пропорциональны синусу
и косинусу угла поворота роторов 3 и 4. Эти сигналы после преобразования блоками 12 и 13 усиливаются предварительными усилителями-ограничителями 18 и 19, проходят через фильтр 20 и поступают на входы фазового детектора 21, который выделяет сигнал, характеризующий кинематическую погрешность зубчатой пары. Этот сигнал усиливается усилителем 22 и затем регистрируется прибором 23.
Формула изобретения
1.Устройство для контроля кинематической погрешности зубчатой пары, содержащее синусно-конусные преобразователи угла поворота колеса и шестерни контролируемой зубчатой пары,
в статорах которых установлены оси, предназначенные для установки контролируемых колес, и выполнены зубья на внутренних поверхностях, во впадинах между которыми расположены обмотки возбуждения, выходные синуснораспре- .деленные обмотки и косинуснораспре- деленные обмотки, регистрирующий прибор и фазовый детектор, к входам которого через блоки преобразования сигналов подключены выходные синусно- распределенные обмотки и косинусно- распределенные обмотки, а выход соединен с регистрирующим прибором, о т- личающееся тем, что, с целью .расширения номенклатуры контролируемых колес, статоры выполнены в виде секторов.
2.Устройство поп.1,отлича- io щ ё ё с я тем, что, с целью повьште- ния точности, оно снабжено двумя предварительными усилителями-ограничителями, входы которьпс соединены с выходами блоков преобразования, выходы соединены через фильтры с входами фазового детектора, и оконечным усилителем, а выход фазового детектора через оконечньй усилитель соединен с регистрирующим прибором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения азимута скважины | 1976 |
|
SU709805A1 |
| Амплитудно-фазовый оптический датчик перемещений | 1989 |
|
SU1670408A1 |
| Феррозондовый преобразователь азимута | 1981 |
|
SU956773A1 |
| АВТОПИЛОТ | 2008 |
|
RU2400795C2 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
| Устройство для контроля погрешностей зубчатых колес | 1978 |
|
SU670800A1 |
| Способ определения резонанса измерительной цепи и устройство для его осуществления | 1990 |
|
SU1725161A1 |
| Преобразователь азимута для телеизмерительной системы | 1982 |
|
SU1059157A1 |
| Преобразователь сигнала датчика перемещения в частоту | 1988 |
|
SU1550619A1 |
| Устройство для измерения нажатий щетки на коллектор электрических машин | 1986 |
|
SU1401542A2 |
Изобретение относится к машиностроению, а именно к средствам контроля зубчатых колес. Цель изобретения - расширение номенклатуры контролируемых колес за счет формы статор1а и повышение точности путем обеспечения возможности снижения паразитных гармоник в выходном сигнале. Это дос- тигается тем, что применение предварительных усилителей-ограничителей 18 и 19 позволяет повысить эффективность узкополосного резонансного фильтра 20 и тем самым снизить паразитные гармоники в выходном сигнале. При вращении роторов 3 и 4, роль которых выполняют контролируемые зубчатое колесо и шестерня, в выходных . обмотках 8,9 и 10, 11 находятся амп- литудно-модулированные сигналы. Амплитуды сигналов пропорциональны синусу и косинусу угла поворота роторов 3 и 4. Эти сигналы после преобразования блоками 12 и 13 усиливаются предварительными усилителями-ограничителями 18 и 19. Затем сигналы проходят через фильтр 20 и поступают на входы фазового детектора 21. Фазовый детектор выделяет сигнал, характеризующий кинематическую погрешность зубчатой пары. Этот сигнал усиливается усилителем 22 и поступает в регистрирующий прибор 23. 1 з.п. ф-лы, 1 ил. S (Л
| Устройство для контроля кинематическойпОгРЕшНОСТи зубчАТыХ пЕРЕдАч | 1979 |
|
SU853373A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
