Предлагаемое изобретение относится к высокоточным системам управления ракет и может быть использовано во вращающихся по крену ракетах с одноканальным управлением.
Известен автопилот для вращающейся ракеты, представленный в литературе: «Переносной зенитный ракетный комплекс «Стрела-2М». М.: Воениздат Минобороны СССР». - 1971, стр.38-41, который может рассматриваться в качестве аналога. Его функциональная схема содержит последовательно соединенные фазовый детектор, фильтр фазового детектора, усилитель-ограничитель и усилитель мощности, выход которого подключен к релейному рулевому приводу. К входу фазового детектора, являющемуся информационным входом устройства, подключается выход усилителя коррекции следящего координатора. Управляющий вход фазового детектора соединен с генератором опорного напряжения, представляющий собой два связанных с корпусом ракеты соленоида, продольные оси которых взаимно перпендикулярны и в которых наводится ЭДС от радиально намагниченного постоянного магнита - ротора гироскопа следящего координатора. Ко второму входу фильтра фазового детектора подключен генератор линеаризации, а ко второму входу усилителя-ограничителя - выход датчика угловой скорости продольной оси ракеты. Следовательно, и фильтр фазового детектора, и усилитель-ограничитель являются одновременно сумматорами. Несущей частотой выходного сигнала усилителя коррекции является частота вращения ротора гироскопа следящего координатора. Величина и фаза первой гармоники этого сигнала соответствуют величине и направлению угловой скорости линии визирования. Фазовый детектор выполнен по схеме с релейной характеристикой по управляющему входу, на который поступает сигнал с генератора опорного напряжения, действующий на суммарной частоте частот вращения ротора гироскопа и ракеты. При этом на выходе фильтра фазового детектора формируется на частоте вращения ракеты сигнал, близкий по форме к синусоидальному, а на выходе усилителя мощности сигнал, имеющий вид меандров. Необходимость формирования выходного сигнала в виде меандров связана с тем, что автопилот работает на релейный рулевой привод. С помощью сигнала с генератора линеаризации формируется линейный участок зависимости амплитуды первой гармоники выходного сигнала автопилота на частоте вращения ракеты от амплитуды первой гармоники его входного сигнала на частоте вращения ротора гироскопа.
Автопилот имеет следующие недостатки:
- шумы сигнала коррекции дополнительно линеаризуют полезный сигнал;
- автопилот не защищен от воздействия импульсных помех.
Наиболее близким по своей технической сущности к предлагаемому изобретению является автопилот по патенту РФ №21247 (БИ, опубл. 27.12.2001), выбранный в качестве прототипа. Автопилот содержит последовательно соединенные синхронный фильтр, ограничитель импульсных помех, фазовый детектор, фильтр фазового детектора, второй вход которого соединен с выходом генератора линеаризации, усилитель-ограничитель и усилитель мощности, выход которого, являющийся выходом устройства, подключается к релейному рулевому приводу, а также последовательно соединенные нелинейный элемент и систему фазовой автоподстройки частоты входящего в ее состав генератора, управляемого напряжением, причем, ко входу синхронного фильтра - первому информационному входу устройства, подключается выход усилителя коррекции следящего координатора, ко второму входу усилителя-ограничителя - второму информационному входу устройства, подключается датчик угловой скорости продольной оси ракеты, ко входу нелинейного элемента - третьему информационному входу устройства, подключается обмотка пеленга следящего координатора, управляющий вход фазового детектора соединен с генератором опорного напряжения, а управляющие входы синхронного фильтра соединены с выходами генератора, управляемого напряжением.
Принцип работы устройства, принятого за прототип, следующий. Сигнал коррекции, соответствующий величине и направлению угловой скорости линии визирования, поступает из следящего координатора на информационный вход синхронного фильтра, формирующего шумовую полосу устройства и снижающего тем самым воздействие помех. Поступающие на синхронный фильтр действующие на частоте вращения ротора гироскопа ортогональные управляющие сигналы (например, сдвинутые на 90° меандры) формируются из сигнала с обмотки пеленга с помощью фильтра, роль которого выполняет система фазовой автоподстройки частоты. Синхронный фильтр представляет собой двухканальное с идентичными каналами устройство с одним входом и одним выходом. Каждый из каналов состоит из последовательно соединенных фазового детектора, фильтра низких частот и модулятора. Информационные входы каналов объединены и представляют собой первый информационный вход автопилота. Выходы каналов подключены ко входам сумматора, выход которого является выходом синхронного фильтра. Управляющие входы фазового детектора и модулятора каждого канала объединены, причем, сигналы, поступающие на управляющие входы каналов, ортогональны (например, функции синуса и косинуса одного аргумента или образованные из них меандры) и действуют на несущей частоте сигнала на информационном входе фильтра. Соединенные последовательно нелинейный элемент и система фазовой автоподстройки частоты понимаются здесь как устройство формирования управляющих сигналов на частоте вращения ротора гироскопа, ко входу которого подключен внешний по отношению к устройству датчик сигнала на частоте вращения ротора гироскопа (обмотка пеленга). После синхронного фильтра сигнал поступает на ограничитель импульсных помех, который не пропускает далее выбросы сигнала, превышающие среднее текущее значение амплитуды полезного сигнала. В фазовом детекторе информация об угловой скорости линии визирования, содержащаяся в его входном сигнале на частоте вращения ротора гироскопа, переносится в его выходной сигнал на частоте вращения ракеты с помощью управляющего сигнала с генератора опорного напряжения на суммарной частоте частот вращения ротора гироскопа и ракеты. При этом управление ракетой в соответствии с выходным сигналом фазового детектора будет производиться в системе координат, связанных с ракетой, так как соленоиды генератора опорного напряжения конструктивно связаны с плоскостью рулей. Фильтр на выходе фазового детектора ослабляет высокие гармоники сигнала и тем самым подчеркивает его первую гармонику, используемую в дальнейшем при формировании сигнала управления ракетой. Подключение ко второму входу фильтра генератора линеаризации, а выхода фильтра - к соединенным последовательно усилителю-ограничителю и усилителю мощности, связано со спецификой работы прототипа на релейный рулевой привод.
Благодаря установленным перед фазовым детектором и соединенным последовательно синхронному фильтру и ограничителю импульсных помех прототип не имеет недостатков аналога. Вместе с тем, прототип и аналог имеют общий недостаток, связанный с использованием в каждом из них фильтра фазового детектора, подчеркивающего полезную составляющую выходного сигнала фазового детектора на частоте вращения ракеты, но, в то же время, фильтр фазового детектора изменяет сдвиг фазы полезной составляющей сигнала при изменении частоты вращения ракеты.
Кроме того, в прототипе при формировании управляющих сигналов синхронного фильтра на несущей частоте входного сигнала в качестве датчика вращения ротора гироскопа используется обмотка пеленга, являющаяся датчиком угла пеленга, в которой при малых углах существенное влияние на частоту и амплитуду ее сигнала оказывают имеющие место собственные колебания продольной оси ракеты, а при угле пеленга, равном нулю, сигнал в обмотке вообще отсутствует, то есть частота сигнала не может быть измерена.
Задачей предлагаемого изобретения является обеспечение точности вырабатываемого сигнала управления автопилотом для вращающейся ракеты с одноканальным управлением при изменении ее частоты вращения.
Для решения поставленной задачи предлагается использовать автопилот, который, как и наиболее близкий к нему, выбранный в качестве прототипа, содержит двухканальную схему обработки входного сигнала автопилота с идентичными 1-м и 2-м каналами, содержащие, в свою очередь, соответственно 1-й и 2-й фазовые детекторы, 1-й и 2-й фильтры низких частот, 1-й и 2-й сумматоры, 1-й и 2-й модуляторы и 3-й сумматор. При этом выход 1-го модулятора соединен с первым входом 3-го сумматора, а выход 2-го модулятора - со вторым входом 3-го сумматора, выход которого является выходом автопилота. Информационные входы 1-го и 2-го фазовых детекторов соединены и являются 1-м информационным входом автопилота.
В отличие от прототипа, в автопилот дополнительно введены 3-й и 4-й фазовые детекторы, информационные входы которых соединены и образуют второй информационный вход автопилота, 1-я, 2-я, 3-я и 4-я схемы выделения среднего за период несущей входного сигнала, 3-й и 4-й фильтры низких частот, 1-й и 2-й функциональные блоки. А также 1-й и 2-й управляемые ограничители с двумя входами и двумя выходами, каждый из которых содержит 1-й и 2-й умножители, выходы которых являются выходами управляемого ограничителя, а управляющие входы соединены с выходом канала управления усилением, состоящего из последовательно соединенных сумматора, схемы извлечения корня и блока нелинейности. Причем, первый и второй входы сумматора соединены соответственно с 1-й и 2-й схемами возведения в квадрат, входы которых подключены к первому и второму информационным входам 1-го и 2-го умножителей соответственно, и являются входами управляемого ограничителя, 1-я схема выделения среднего установлена между 1-м фазовым детектором и 1-м фильтром низких частот, а 2-я схема выделения среднего - между 2-м фазовым детектором и 2-м фильтром низких частот, 3-й и 4-й фазовые детекторы, схема выделения среднего, фильтр низких частот соединены последовательно и соответственно соединены со входами 1-го и 2-го функциональных блоков, выходы которых подключены ко вторым входам 1-го и 2-го сумматоров, 1-й управляемый ограничитель установлен между 1-м и 2-м фильтрами низких частот и 1-м и 2-м сумматорами, 2-й управляемый ограничитель - между 1-м и 2-м сумматорами и 1-м и 2-м модуляторами, информационные входы 3-го и 4-го фазовых детекторов объединены и являются вторым информационным входом автопилота, а третий вход 3-го сумматора - третьим информационным входом автопилота, управляющие входы 1-го и 3-го, а также 2-го и 4-го фазовых детекторов соответственно соединены между собой и являются 1-м и 2-м управляющими входами автопилота, подключаемыми к выходам внешнего генератора ортогональных опорных сигналов на несущей частоте входных сигналов на первом и втором информационных входах. Управляющие входы модуляторов, являющиеся 3-м и 4-м управляющими входами автопилота, подключаются к выходам внешнего генератора ортогональных опорных сигналов на частоте вращения ракеты.
Сущностью предлагаемого изобретения является то, что входные сигналы автопилота на переменном токе, несущие информацию о координатах во вращающейся системе отсчета координат, преобразуются в сигналы постоянного тока, отображающие информацию о координатах в неподвижной декартовой системе координат, связанной с ракетой. Далее, сигналы обрабатываются и преобразуются в выходной сигнал автопилота, несущий информацию о координатах во вращающейся на частоте вращения ракеты системе отсчета координат. При этом амплитуда и фаза такого сигнала управления одноканальной вращающейся ракетой не зависит от частоты ее вращения.
Автопилот работает при условии, что в устройстве формирования опорных сигналов, являющемся внешним по отношению к автопилоту, опорные сигналы формируются на основе сигналов, поступающих с генератора опорных сигналов следящего координатора на суммарной частоте частот вращения ротора гироскопа и ракеты, а также сигналов на частоте вращения ракеты с конструктивно связанного с ней датчика угла ее вращения вокруг продольной оси. В устройстве опорные сигналы формируются на основе тригонометрических преобразований


В (1) и (2) обозначены:
ωgir,ωr,ωgon - частоты вращения ротора гироскопа и ракеты и их суммарная частота(частота сигнала с генератора опорного напряжения),
t - текущее время,
θdat - угловая ошибка датчика вращения ракеты. Как следует из (1) и (2), сигналы могут использоваться как опорные для формирования сигнала управления ракетой, так как они формируются из сигналов генератора опорных напряжений, конструктивно связанного с плоскостью рулей. Система координат, отображаемая этими сигналами, развернута на величину угловой ошибки датчика вращения относительно идеальной системы координат.
Сущность изобретения поясняется чертежом, где на Фиг.1 представлена функциональная схема автопилота, как двухканального устройства с идентичными каналами, реализующего эту его особенность в части формирования выходного сигнала в зависимости от сигнала коррекции, а на Фиг.2 приведена функциональная схема управляемого ограничителя.
На функциональной схеме (Фиг.1) введены следующие обозначения:
1 - 1-й фазовый детектор;
2 - 2-й фазовый детектор;
3 - 1-я схема выделения среднего;
4 - 2-я схема выделения среднего;
5 - 1-й фильтр низких частот;
6 - 2-й фильтр низких частот;
7 - 1-й управляемый ограничитель;
8 - 1-й сумматор;
9 - 2-й сумматор;
10 - 2-й управляемый ограничитель;
11 - 1-й модулятор;
12 - 2-й модулятор;
13 - 3-й сумматор;
14 - 3-й фазовый детектор;
15 - 4-й фазовый детектор;
16 - 3-я схема выделения среднего;
17 - 4-я схема выделения среднего;
18 - 3-й фильтр низких частот;
19 - 4-й фильтр низких частот;
20 - 1-й функциональный блок;
21 - 2-й функциональный блок.
На функциональной схеме (Фиг.2) введены следующие обозначения:
22 - 1-й умножитель;
23 - 2-й умножитель;
24 - канал управления усилением;
25 - сумматор;
26 - схема извлечения корня;
27 - блок нелинейности;
28 - 1-я схема возведения в квадрат;
29 - 2-я схема возведения в квадрат.
Принцип работы устройства следующий. Сигнал коррекции Ucorr поступает на 1-й информационный вход устройства, и, следовательно, на информационные входы фазовых детекторов 1 и 2. На их управляющие входы с внешнего по отношению к автопилоту устройства формирования опорных сигналов поступают сигналы (1) и (2). Выходные сигналы фазовых детекторов 1 и 2 отображают информацию о величине и направлении угловой скорости, содержащуюся в сигнале коррекции, в неподвижной декартовой системе координат.

где
U0 - амплитуда сигнала, соответствующая величине угловой скорости,
γ - угол, соответствующий направлению угловой скорости линии визирования.
Выходы фазовых детекторов 1 и 2 соединены со схемами выделения среднего 3 и 4 за период вращения ротора гироскопа, которые далее не пропускают гармоники сигналов на частотах, кратных частоте вращения ротора. На выходах схем выделения среднего 3 и 4 сигналы U3 и U4 соответственно имеют вид

Co схемами выделения среднего 3 и 4 последовательно соединены соответственно фильтры низких частот 5 и 6, которые определяют шумовую полосу автопилота. Выходы фильтров подключены ко входам первого управляемого ограничителя 7, который обеспечивает защиту схемы от перегрузок, в том числе и от импульсных помех. Первый управляемый ограничитель 7 содержит (см. Фиг.2) умножители 22 и 23, информационные входы которых являются входами управляемого ограничителя 7, а выходы - его выходами, управляющие входы умножителей 22 и 23 соединены с выходом канала управления усилением 24, состоящего из последовательно соединенных сумматора 25, схемы извлечения корня 26 и блока нелинейности 27, при этом ко входам сумматора 25 подключены 1-я и 2-я схемы возведения в квадрат 28 и 29, входы которых соединены соответственно с входами 1-го и 2-го умножителей 22 и 23. В блоке нелинейности 27 формируется сигнал, отражающий зависимость коэффициента усиления сигналов на выходах фильтров от значения их модуля. Эта зависимость имеет два участка. При малых значениях модуля коэффициент усиления постоянен. Начиная с некоторого заданного значения модуля, коэффициент усиления обратно пропорционален величине модуля. При этом возникает эффект ограничения сигналов на выходах умножителей 22 и 23 (при возрастании сигналов на информационных входах умножителей 22 и 23 сигналы на их выходах не изменяются). Выходы умножителей 22 и 23 соединены с первыми входами сумматоров 9 и 10, вторые входы которых соединены с выходами функциональных блоков 20 и 21, предназначенных для корректировки сигналов управления либо по априорной, либо по апостериорной информации (например, информации об угле пеленга и его производных, содержащейся в сигнале с обмотки пеленга следящего координатора). Далее выходы сумматоров 8 и 9 соединены с входами последовательно соединенных второго управляемого ограничителя 10, аналогичного первому управляемому ограничителю 7, модуляторов 11 и 12 и третьего сумматора 13. Сумматоры 8 и 9, а также второй управляемый ограничитель 10 установлены в связи с тем, что к автопилоту обычно подключаются дополнительные устройства, сигналы с которых могут вызвать перегрузку последующих каскадов автопилота. Сумматор 13 имеет третий вход, являющийся одним из информационных входов автопилота, на который с внешнего устройства может при необходимости подаваться сигнал на частоте вращения ракеты (например, как в прототипе, сигнал с датчика угловой скорости продольной оси ракеты). На управляющие входы модуляторов 11 и 12, соединенных с выходами внешнего по отношению к автопилоту устройства формирования опорных сигналов, поступают ортогональные синусоидальные сигналы V11 и V12 на частоте вращения ракеты

где
V0- амплитуда ортогональных синусоидальных сигналов.
Выход сумматора 13 является выходом предлагаемого автопилота для вращающейся ракеты.
Блоки 14, 16, 18, 20 - последовательно соединены. Также последовательно соединены идентичные им блоки 15, 17, 19, 21. Управляющие входы блоков 14 и 15 связаны соответственно с управляющими входами блоков 1 и 2. Информационные входы блоков 14 и 15 объединены и являются 2-м информационным входом автопилота. Выходы блоков 20 и 21 соединены соответственно со вторыми входами блоков 8 и 9.
В соответствии с (4) и (5) выходной сигнал автопилота (Uan) имеет вид

где
 - амплитуда сигнала автопилота.
- амплитуда сигнала автопилота.
Таким образом, достигается необходимая точность вырабатываемого автопилотом сигнала управления при изменении частоты вращения ракеты с одноканальным управлением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вращающаяся самонаводящаяся ракета | 2018 |
|
RU2694934C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ЕГО РЕАЛИЗУЮЩАЯ | 2013 |
|
RU2549615C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА КОМАНДЫ ОДНОКАНАЛЬНЫХ ВРАЩАЮЩИХСЯ РАКЕТ И СНАРЯДОВ С РЕЛЕЙНЫМ РУЛЕВЫМ ПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2574500C2 |
| ГИРОСКОПИЧЕСКОЕ СЛЕДЯЩЕЕ ЗА ЦЕЛЬЮ УСТРОЙСТВО САМОНАВОДЯЩЕЙСЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТЫ | 2009 |
|
RU2397435C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ОПТИКО-ЭЛЕКТРОННЫХ СЛЕДЯЩИХ СИСТЕМ | 1995 |
|
RU2093850C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2152001C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ С ЧАСТОТНО-ВРЕМЕННЫМ УПЛОТНЕНИЕМ РАДИОКАНАЛА И АНАЛОГО-ЦИФРОВЫМ МЕТОДОМ ЧАСТОТНОЙ (ФАЗОВОЙ) МОДУЛЯЦИИ НЕСУЩЕЙ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2342783C1 |
| ДВУХКАНАЛЬНЫЙ САМОНАСТРАИВАЮЩИЙСЯ АВТОПИЛОТ ДЛЯ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТЫ | 1999 |
|
RU2177170C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2002 |
|
RU2235969C1 |

Изобретение относится к области управления вращающимися по крену ракетами с одноканальным управлением. Технический результат - обеспечение точности вырабатываемого сигнала управления автопилотом для вращающейся ракеты с одноканальным управлением при изменении ее частоты вращения. Автопилот содержит двухканальную схему обработки входного сигнала автопилота с идентичными 1-м и 2-м каналами, содержащих, в свою очередь, соответственно 1-й и 2-й фазовые детекторы, 1-й и 2-й фильтры низких частот, 1-й и 2-й сумматоры, 1-й и 2-й модуляторы и 3-й сумматор, при этом выход 1-го модулятора соединен с первым входом 3-го сумматора, а выход 2-го модулятора - со вторым входом 3-го сумматора, выход которого является выходом автопилота. В автопилот введены 3-й и 4-й фазовые детекторы, информационные входы которых соединены и образуют второй информационный вход автопилота. Также введены 1-я, 2-я, 3-я и 4-я схемы выделения среднего за период несущей входного сигнала, 3-й и 4-й фильтры низких частот, 1-й и 2-й функциональные блоки, 1-й и 2-й ограничители. Канал управления усилением состоит из последовательно соединенных сумматора, схемы извлечения корня и блока нелинейности. 2 ил.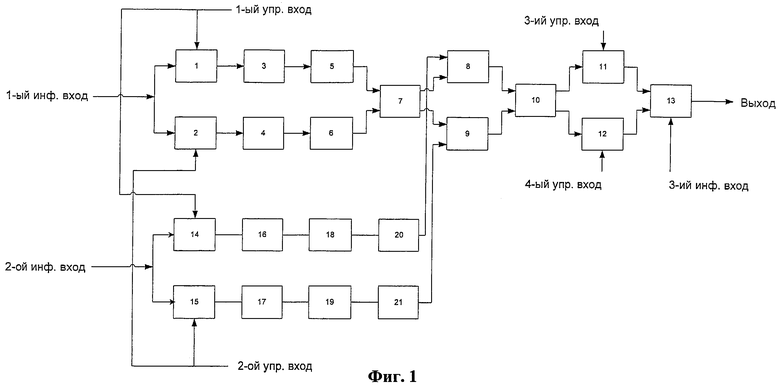
Автопилот для вращающейся ракеты с одноканальным управлением, содержащий двухканальную схему обработки входного сигнала автопилота с идентичными 1-м и 2-м каналами, содержащими соответственно 1-й и 2-й фазовые детекторы, 1-й и 2-й фильтры низких частот, 1-й и 2-й сумматоры, 1-й и 2-й модуляторы и 3-й сумматор, при этом выход 1-го модулятора соединен с первым входом 3-го сумматора, а выход 2-го модулятора - со вторым входом 3-го сумматора, выход которого является выходом автопилота, информационные входы 1-го и 2-го фазовых детекторов соединены и являются 1-м информационным входом автопилота, отличающийся тем, что он снабжен 3-м и 4-м фазовыми детекторами, информационные входы которых соединены и образуют второй информационный вход автопилота, 1-й, 2-й, 3-й и 4-й схемами выделения среднего за период несущей входного сигнала, 3-м и 4-м фильтрами низких частот, 1-м и 2-м функциональными блоками, а также 1-й и 2-й управляемыми ограничителями с двумя входами и двумя выходами, каждая из которых содержит 1-й и 2-й умножители, выходы которых являются выходами ограничителя, а управляющие входы соединены с выходом канала управления усилением, состоящего из последовательно соединенных сумматора, схемы извлечения корня и блока нелинейности, причем первый и второй входы сумматора соединены соответственно с 1-й и 2-й схемами возведения в квадрат, входы которых подключены к первому и второму информационным входам 1-го и 2-го умножителей соответственно, и являются входами управляемого ограничителя, 1-я схема выделения среднего установлена между 1-м фазовым детектором и 1-м фильтром низких частот, а 2-я схема выделения среднего - между 2-м фазовым детектором и 2-м фильтром низких частот, 3-й и 4-й фазовые детекторы, схема выделения среднего, фильтр низких частот соединены последовательно и соответственно соединены с входами 1-го и 2-го функциональных блоков, выходы которых подключены ко вторым входам 1-го и 2-го сумматоров, 1-й управляемый ограничитель установлен между 1-м и 2-м фильтрами низких частот и 1-м и 2-м сумматорами, 2-й управляемый ограничитель - между 1-м и 2-м сумматорами и 1-м и 2-м модуляторами, информационные входы 3-го и 4-го фазовых детекторов объединены и являются вторым информационным входом автопилота, а третий вход 3-го сумматора - третьим информационным входом автопилота, управляющие входы 1-го и 3-го, а также 2-го и 4-го фазовых детекторов соответственно соединены между собой и являются 1-м и 2-м управляющими входами автопилота, подключаемыми к выходам внешнего генератора ортогональных опорных сигналов на несущей частоте входных сигналов на первом и втором информационных входах, а управляющие входы модуляторов, являющиеся 3-м и 4-м управляющими входами автопилота, подключаются к выходам внешнего генератора ортогональных опорных сигналов на частоте вращения ракеты.
| ГРОЗОВОЙ ПЕРЕКЛЮЧАТЕЛЬ | 1930 |
|
SU21247A1 |
| ДВУХКАНАЛЬНЫЙ САМОНАСТРАИВАЮЩИЙСЯ АВТОПИЛОТ ДЛЯ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТЫ | 1999 |
|
RU2177170C2 |
| АВТОПИЛОТ ДЛЯ СИММЕТРИЧНОЙ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2302358C1 |
| Способ восстановления сухих молочных продуктов | 1981 |
|
SU1050635A1 |
| US 2005056730 A1, 17.03.2005. | |||

