j:;ii
о
Ю 4
00
Изобретение относится к машиностроению, а именно к устройствам для сборки резьбовых соединений, и может быть использовано в любой отрасли промышленности при монтажно-сборочных работах.
Целью изобретения является повышение точности контроля усилия затяжки путем первоначальной затяжки с контролем крутя- ш.его момента и окончательной затяжки посредством подачи в резьбовое соединение определенной дозы энергии.
На чертеже приведена функциональная схема устройства.
Устройство для сборки резьбовых соединений содержит электродвигатель 1, планетарный редуктор 2 с выходным валом 3, установленный на нем датчик 4 момента, шпиндель 5 с рабочей головкой 6, маховик 7, входной вал которого через датчик 8 угловой скорости соединен с валом электродвигателя 1. Узел управления 9 включает в себя источник 10 питания, первый И и второй 12 компараторы, блок 13 коммутации, триггер 14, элемент И 15, транзисторный к, 1юч 16. Первый комнаратор 11 первым входом нодк. почеп к выходу датчика 4 момента, вторым входом - к установочной иJи- не устройства. 5ыходом - к установочному ()д грип ера 14, соединенного устано- вочшям .Ч- 5ходом через б.чок 13 коммутации с шиной «Напряжение логической единицы. Выход триггера 14 соединен с первы.м входом элемента И 15, выход которого связан с управляющим входом транзисторного ключа 16 подсоединенного эмиттером к общей нулевой П1ине, а ко.члектором - к положительному выводу блока 10 питания. Датчик 8 угловой скорости выходом подключен к первому входу второго компаратора 12, связанного вто рым входом с установочной шиной устройства, выходом - со вторым входом элемента И 15.
Устройство работает следуюшим образом.
При срабатывании блока 13 коммутации трип ер 14 устанавливается в единичное состояние. Условие совпадеипя для элемента И 15 начинает выполняться, транзисторный ключ 16 открывается и к электродвигателю I прикладывается напряжение блока 10 питания. Вал э, 1ектродвигателя I при- ходит во вращение. При этом на выходе датчика-- 8 угловой скорости появляется напряжение, пропорциопалное угловой скорости вала э;1ектродви1 ате.-|Я 1. Если напряжение на выходе датчика 8 угловой скорости мепыпе опорного нанряжения, подаваемого на второй вход второго компаратора 12, на выходе компаратора 12 нояв.1яется напряжение логической единицы, и электродвигатель 1 через транзисторный ключ 16 подключен к блоку 10 пггания. Как только иа- пряжение на выходе датчика 8 превысит опорное напряжение на выходе второго компаратора 12, напряжение . югической едини
5
0
5
0 п 5
0
5
цы пропадает, условие совпадения для элемента И 15 иерестает выполняться. Электродвигатель 1 отключается от блока 10 питания, его угловая скорость начинает уменьшаться, как только напряжение на выходе датчика 8 станет меньше опорного напряжения, подаваемого на второй вход второго компаратора 12. Электродвигатель I вновь подключается к блоку 10 питания. Таким образом поддерживается заданная угловая скорость, величина которой определяется величиной опорного напряжения, подаваемого на второй вход второго компаратора 12.
После того, как угловая скорость достигла установленной величины, рабочую головку б надевают на гайку резьбового соединения (не показаны) и производят завинчивание.
После сонрикосновения торца гайки с опорной поверхностью собираемого узла начинается процесс затяжки гайки, момент на рабочей головке 6 начинает возрастать, следовательно, начинает возрастать напряжение снимаемого с выхода датчика 4 момента.
При достижении моментом величины, которая устанавливается регулировкой опорного напряжения, подаваемого на второй вход нервого компаратора 1 1 в пределах 20-30% требуемого момента затяжки, срабатывает первый компаратор 11. На его выходе появляется напряжение логической единицы, которым триггер 14 устанавливается в нулевое состояние. Условие совпадения для элемента И 15 перестает выполняться, электродвигатель 1 отключается от блока 10 питания и окончательная затяжка осуществляется за счет кинетической энергии, накопленной .маховиком 7.
Регулировкой угловой скорости э, 1ектро- двигателя 1 устанавливается величина дозы энергии, подаваемой в резьбовое соединение, на этапе окончательной затяжкн.
После остановки электродвигателя I устройство отводят от собранного резьбового соединения.
Формула изобретения
Устройство для сборки резьбовых соединений, содержашее электродвигатель, планетарный редуктор с выходным валом, установленный на нем датчик момента, шпиндель с рабочей головкой и узел управления, включающий блок питания, первый и. второй компараторы, первый из которых первым входом подключен к выходу датчика .момента, вторым входом - к установочной 1нине, выходом - к установочному R-входу триггера, соединенного установочнь1м S-вхо- дой через блок коммутации с шиной «Напряжение логической единицы, выход триггера соединен с нервы.м входом элемента И, выход которого связан с управляющим входом транзнсторного ключа, подсоединенного эмит14302- 8
34
тером к общей нулевой шипе, отличающее-ключей к первому входу второи) ixoMnapaioся тем, что, с целью повышения точности кон-ра, связанного вторым входом с установочтроля усилия затяжки, о.по снабжено махо-ной (пппой, выходом - с вти|1ым входом
виком, датчиком угловой скорости, связан-элемента И, а коллектор транзисторного
ным с последним и валом электродвига- ключа соединен с положительным выводом
теля, выход датчика угловой скорости иод-блока питания.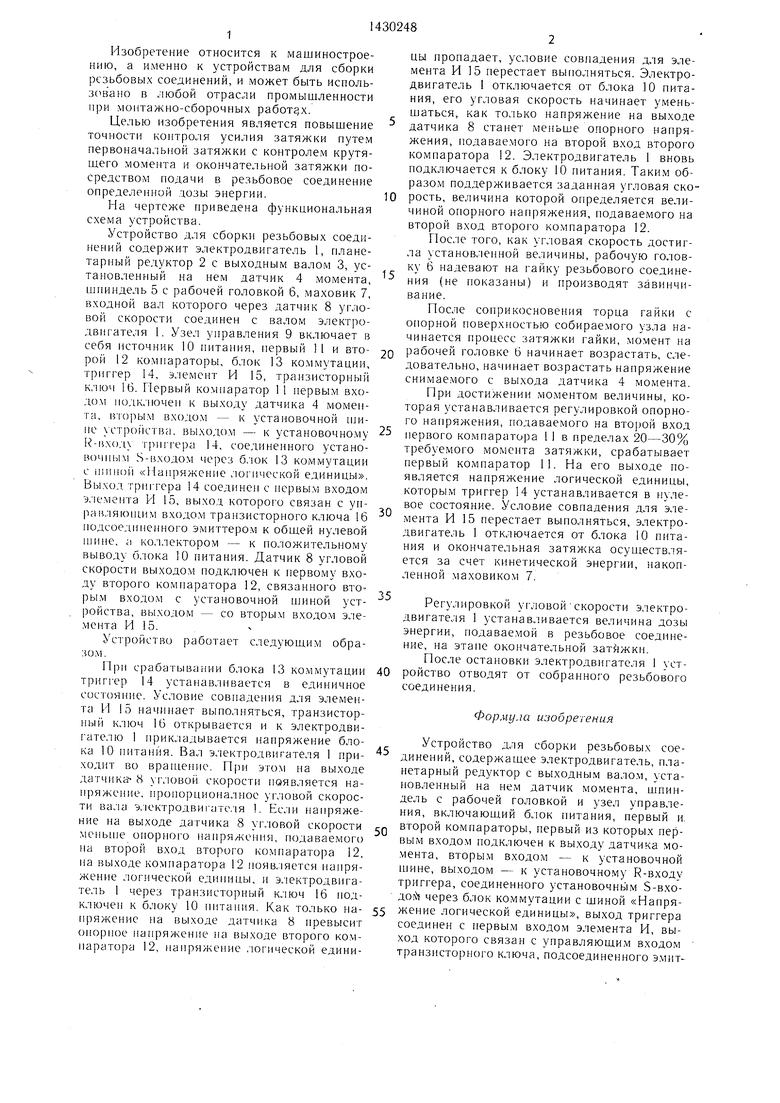
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления многошпиндельным гайковертом | 1985 |
|
SU1265032A1 |
| Многошпиндельный гайковерт | 1986 |
|
SU1426770A1 |
| Способ сборки резьбовых соединений и устройство для его осуществления | 1988 |
|
SU1504083A1 |
| Система управления гайковертом | 1988 |
|
SU1504082A2 |
| Система управления гайковертом | 1985 |
|
SU1271733A1 |
| Многошпиндельный гайковерт | 1984 |
|
SU1245426A1 |
| СПОСОБ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ УДАРНЫМ ГАЙКОВЕРТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2359810C2 |
| Система управления гайковертом | 1986 |
|
SU1308985A1 |
| Многошпиндельный гайковерт | 1983 |
|
SU1142814A1 |
| Многошпиндельный гайковерт | 1987 |
|
SU1438955A1 |
Изобретение относится к устр011ствам для сборки резьбовых соединений и может быть исно, 1ьзовано нри монтажно-сборочных работах. Цель изобретенияповышение точности контро.чя уси. 1ия затяжки. Устройство д. 1я сборки рсзьб) соединений содс жнт ;),1ектр()Д1и1г;1Гг.:ь I, планетарный редукнем датчик 4 момента, нпшндель о с шбо- чеГ| головкой 6, маховик 7. через датчнк 8 угловой скорости соединенный с ва.юм :j, ieK- тродвигателя I, зел 9 уирав.чения. При срабатывании б. кжа 13 коммутации нронсходнт включение у.чектродвигатс.чя I. на Ba.iy которого установлен маховик 7 н датчик 8 уг. ю- вой скорости. Паиряженне с выхода датчика 8 угловой скорости через комнаратор 12 ун- рав.чяет ключол 6. че|1ез KoToiibH i осунюсг- вляется нодключение а.1ект|Х)двигато, 1Я I ix блоку 10 нитания таким образом, что иод- держивается заданная уг. ювая скорость .чек- тродвнгателя I. Вращение а,-1ектродвигате.;я I через иланетарный редуктор 2 передается рабочей головке 6. При достиженнн момен то.м на рабочей го.ювке Н ве.шчины нерви- нача.чьной затяжкн производится отк.почс - нне -:)лектродн11гатсля 1, а оконмате,1ьиая за 1яжка осущеетв.чяется за счет киштнчс с- Ki)ii унергин, HaKoiL iciinoii xiaxcBiiKdM 7 i H.I. со
| Предельный электромеханический гайковерт | 1975 |
|
SU612783A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Патент США № 3827506, кл | |||
| Джино-прядильная машина | 1922 |
|
SU173A1 |
