Изобретение относится к автомати20
25
ке и вычислительной технике и предназначено для использования в системах программного управления
Цель изобретения - упрощение устройства
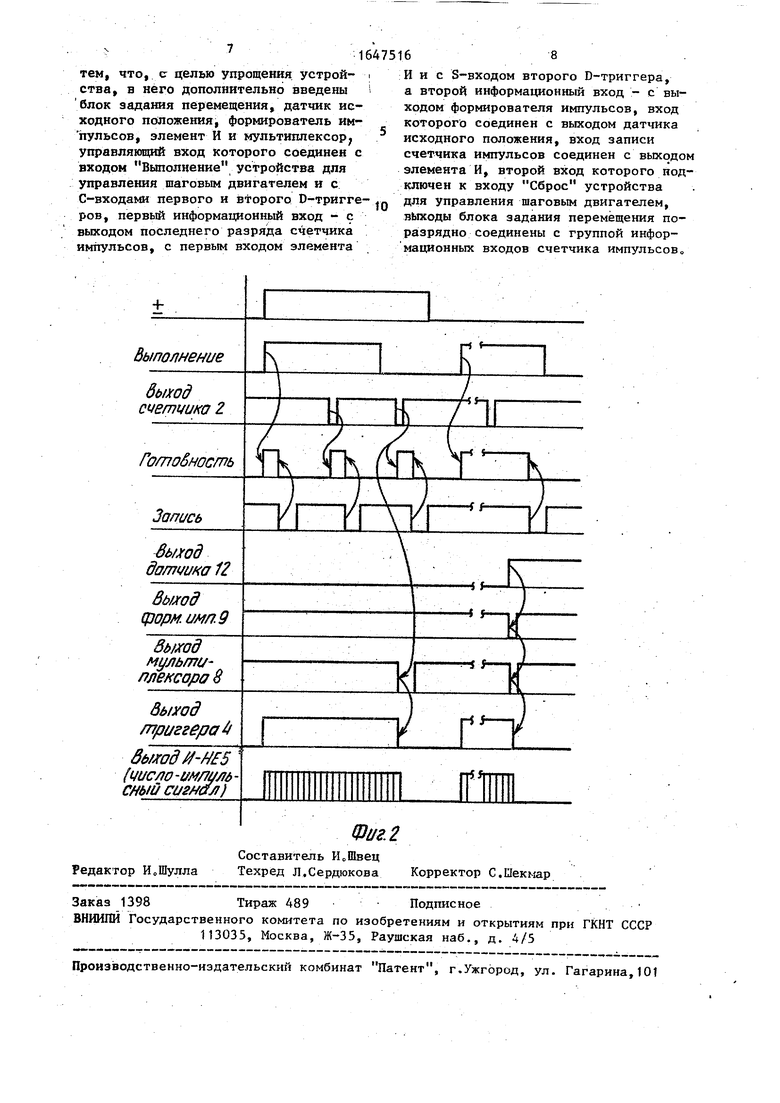
На фиг. 1 представлена схема устройства для управления шаговым двигателем; на фиг, 2 - временная диаграмма работыо
Устройство содержит блок 1 задания перемещения, счетчик 2 импульсов, 30 второй 3 и первый 4 D-триггеры, элемент И-НЕ 5, генератор 6 импульсов, элемент И 7, мультиплексор 8, формирователь 9 импульсов, коммутатор 10, шаговый двигатель 11, датчик 12 ис- 35 ходного положения„
Устройство работает следующим образом
Число импульсов в пачке устанавливается параллельным кодом в блоке 1 40 задания перемещения и записывается в счетчик 2 импульсов (активным уровнем Логс0) сигналом по входу Сброс при включении питания или изменении кода Сигнал поступает че- 5 рез элемент И 7 на вход записи параллельной загрузки счетчика 2 импульсов Управляющее устройство по входу + вырабатывает информацию о знаке направления вращения шагового 50 двигателя и формирует сигнал Выполнение, который поступает на управляющий вход мультиплексора 8 и тактируемый фронтом импульса синхровход -триггеров 4 и 3 с Так как D-входы 55 подсоединены к шине с уровнем сигнала, равным логической единице (), D-триггеры З и 4 устанав0
5
0 5
0 5 0 5
ливаются в единичное состояниеf Сигнал с выхода D-триггера 4 открывает элемент И-НЕ 5 и частота генератора 6 импульсов поступает на вычитающий вход счетчика 2 и коммутатор 10 (коммутатор типа ТЗУШ-1)С
Мультиплексор 8 под воздействием сигнала Выполнение (уровень Лог,.11) коммутирует на R-вход D- триггера 4 сигнал с выхода формирователя 9 импульсов. Формирователь 9 импульсов формирует короткий импульс при срабатывании датчика 12 исходного положения о При отсутствии сигнала Выполнение (уровень Лог, 0) мультиплексор коммутирует на R-вход триггера 4 сигнал окончания счета с выхода счетчика 2Ь Таким образом, при наличии сигнала Выполнение сброс триггера 4 (окончание формирования импульсов) происходит только после срабатывания датчика 12, а при отсутствии - сигналом ее счетчика 2
Внешнее устройство формирует сигнал Выполнение так, что при выходе исполнительного органа в точку позиционирования, остановка шагового двигателя происходит по сигналу со счетчика 2, а при выходе в исходное состояние - по сигналу с датчика 12 Коммутатор 10 преобразует импульсы в последовательность токов в обмотках шагового двигателя 11с Сигнал с выхода D-триггера З поступает на выход Готовность, информируя внешнее устройство о начале формирования первой пачки импульсов, которое формирует импульс по входу Запись и сбрасывает триггер 3„ После считывания числа на выходе счетчика 2 импульсов
516
формируется сигнал, который поступает на вход элемента И и производит перезапись кода в счетчик. Сигнал со счетчика также поступает на S-вход D-триггера З и формирует сигнал Готовность
Сигнал Запись снова сбрасывает триггер 3 и цикл повторяется до тех пор, пока общее количество импульсов по входу Готовность станет равным необходимому количеству пачек в серии импульсов. После этого внешнее управляющее устройство снимает сигнал Выполнение, тем самым мультиплексор 8 коммутирует на R-вход триггера 4 сигнал с выхода счетчика 2 импульсов. После считывания числа сигнал с его выхода сбрасывает D-триггер 4. Формирование серии импульсов на этом.за- канчивается и вращение шаговых двигателей прекращается.
Подсчет необходимого количества пачек импульсов производится вычислительным управляющим устройством путем подсчета количества активных уровней сигнала по шине Готовность „ Для удобства управления можно разбить все поле действия исполнительного механизма на координатную сетку с ша- гом, кратным перемещению механизма при отработке шаговым двигателем одной пачки импульсов. Б программе управления вычислительного устройства достаточно указать координаты точек позиционирования исполнительного механизма. Последовательность таких координат определяет последовательность и геометрию перемещений.Для выхода механизма в требуемую точку вычислительное управляющее устройство считывает координаты, Формирует управляющие сигналы в необходимой последовательности .
При установке исполнительного ор- гана в исходное состояние формируются сигналы + и Выполнение и анализируется сигнал с выхода датчика исходного полохсения. Мультиплексор 8 коммутирует на вход D-триггера 4 сигнал с выхода формирователя 9 импульсов. При срабатывании датчика 12 исходного положения формирователь 9 импульсов выдает узкий импульс и сбрасывает D-триггер„ Внешнее управляю- щее устройство снимает сигнал Выполнение и сбрасывает D-триггер З.
Преимущество изобретения заключается в использовании минимального ко16
личества связей с внешним вычислительным устройством, что существенно при использовании в качестве такового контроллеров, не имеющих внешних шин адреса и данных и работающих только с унитарными сигналами (например контроллеры программируемые ГСП Микро ДАТ МБ 5700), а также отпадает необходимость использования счетчика большой разрядности,,
В устройстве сигнал с датчика обрабатывается аппаратной частью и производится остановка перемещения, после этого выполняется программа обработки сигнала в программном управляющем устройстве (принимается решение о дальнейших действиях: формирование технологической команды, начало нового цикла и т.д)0 Это позволяет повысить точность позиционирования за .счет уменьшения времени реакции устройства на сигнал датчика Если время задержки сигнала аппаратной частью в среднем не превышает задержку 3.„ 5 элементов серии ТТЛ (для К 155-5 К 22 не 110 не), то для программной обработки этот тервал значительно больше0 Например, при использовании в узле управления микропроцессора типа К580ВМ80 время выполнения пяти-восьми простейших операций типа регистр - регистр, необходимых для обработки сигнала, составляет мкс 16 мкс.
Кроме этого, использование нескольких таких устройств обеспечивает одновременное управление несколькими шаговыми двига гелями одним цифровым вычислительным устройством.
Формула изобретения
Устройство для управления шаговым двигателем, содержащее генератор импульсов, соединенный выходом с первым входом элемента И-НЕ, подключенного выходом к вычитающему входу счетчика импульсов и к информационному входу коммутатора, второй вход элемента И-НЕ подключен к выходу первого D-триггера, соединенного с выходом Выполнение устройства для управления шаговым двигателем, R-вхо второго D-триггера соединен с входом Запись устройства для управления шаговым двигателем, вход Готовность которого подключен к выходу второго D-триггера, отличающееся
тем, что, сг целью упрощения устрой- ства, в него дополнительно введены блок задания перемещения, датчик исходного положения, формирователь им- пульсов, элемент И и мультиплексор; управляющий вход которого соединен с входом Выполнение устройства для управления шаговым двигателем я с С-входами первого и второго D-тригге- ров, первый информационный вход - с выходом последнего разряда счетчика импульсов, с первым входом элемента
i
JQ
6475168
i И и с S-входом второго D-триггера, а второй информационный вход - с выходом формирователя импульсов, вход которого соединен с выходом датчика исходного положения, вход записи счетчика импульсов соединен с выходом элемента И, второй вход которого подключен к входу Сброс устройства для управления шаговым двигателем, выходы блока задания перемещения поразрядно соединены с группой информационных входов счетчика импульсов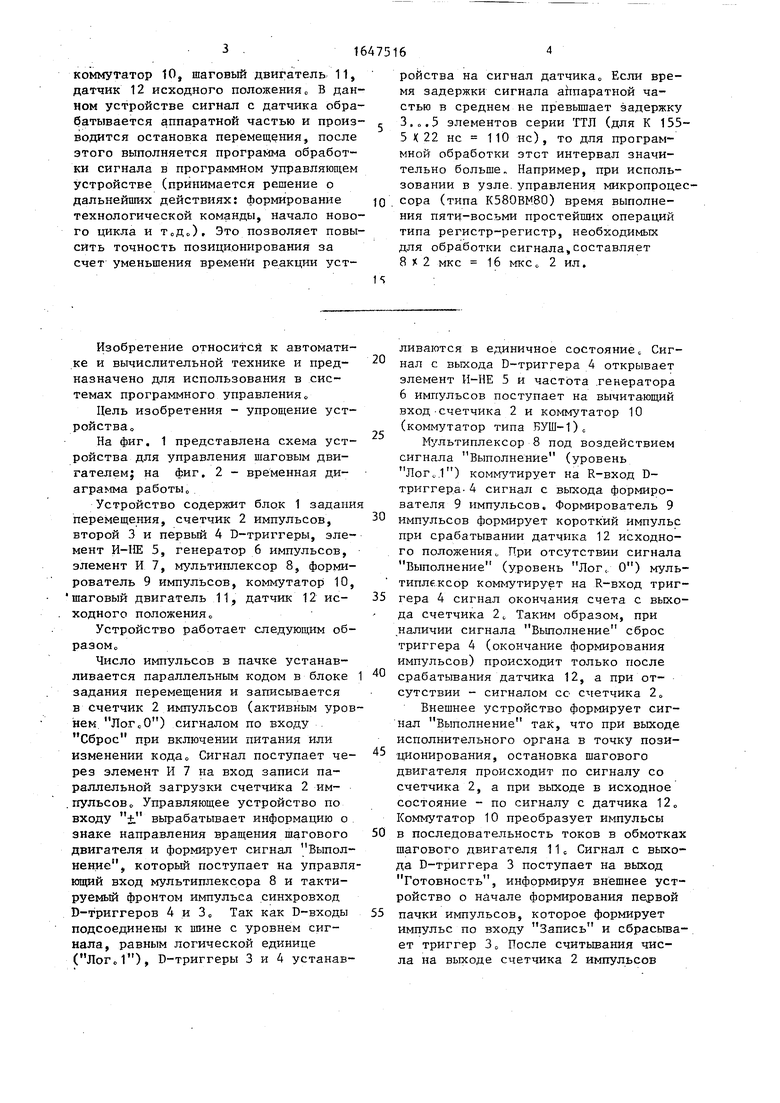

| название | год | авторы | номер документа |
|---|---|---|---|
| Программно-управляемый модуль | 1986 |
|
SU1403018A1 |
| Устройство управления процессом приготовления многокомпонентных смесей | 1989 |
|
SU1688127A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ СТАНКА-АВТОМАТА ДЛЯ ОБРАБОТКИ ВИНТОВЫХ КАНАВОК НА ИЗДЕЛИИ | 1993 |
|
RU2082594C1 |
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| Многоканальная система измерения и регистрации | 1988 |
|
SU1707546A1 |
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
| СТЕНД ДЛЯ ИЗУЧЕНИЯ ЭЛЕКТРОННЫХ СРЕДСТВ АВТОМАТИЗАЦИИ | 2005 |
|
RU2279718C1 |
| Устройство для программного управления шаговым двигателем | 1989 |
|
SU1675850A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1981 |
|
SU993428A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 2002 |
|
RU2220440C1 |
Изобретение относится к автоматике и вычислительной технике и предназначено для использования в системах программного управления. Цель - упрощение устройства„ Устройство для управления шаговым двигателем содержит блок 1 задания перемещения, счетчик 2 импульсов, второй D-триггер З, первый D-триггер 4, элемент И-НЕ 5, генератор 6 импульсов, элемент И 7, мультиплексор 8, формирователь 9 импульсов,
Редактор И„Шулла
Составитель И„Швец Техред Л.Сердюкова
Фиг. 2
Корректор С.Шекмар
| Устройство для управления шаго-ВыМи дВигАТЕляМи | 1978 |
|
SU807233A1 |
| l | |||
