и.
4;:
СО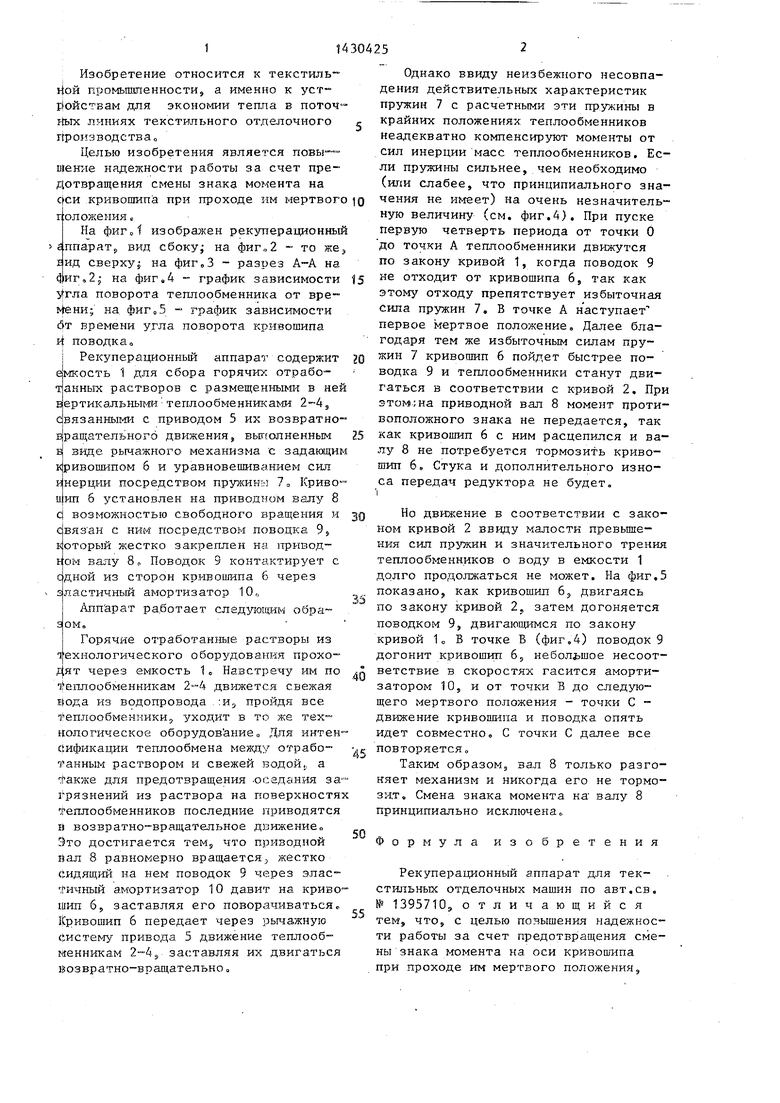
| название | год | авторы | номер документа |
|---|---|---|---|
| Рекуперационный аппарат для текстильных отделочных машин | 1986 |
|
SU1395710A1 |
| Рекуперационный аппарат для текстильных отделочных машин | 1990 |
|
SU1772260A1 |
| РЕКУПЕРАЦИОННЫЙ АППАРАТ ДЛЯ ТЕКСТИЛЬНЫХ ОТДЕЛОЧНЫХ МАШИН | 1991 |
|
RU2018553C1 |
| Рекуперационный аппарат для текстильных отделочных машин | 1990 |
|
SU1745786A1 |
| Рекуперационный аппарат для текстильных отделочных машин | 1990 |
|
SU1772259A1 |
| Привод рапиры ткацкого станка | 1990 |
|
SU1807118A1 |
| МЕХАНИЗМ ПРИВОДА ПУАНСОНА УЛЬТРАЗВУКОВОЙ ШВЕЙНОЙ МАШИНЫ | 2024 |
|
RU2829826C1 |
| Смеситель | 1979 |
|
SU880458A1 |
| РАБОЧИЙ ОРГАН УСТРОЙСТВА ДЛЯ МОЙКИ АВТОМОБИЛЕЙ | 1991 |
|
RU2017640C1 |
| УСТРОЙСТВО ПЕРИОДИЧЕСКОГО ВЫТЯГИВАНИЯ СЛИТКОВ | 1990 |
|
RU2089339C1 |
Изобретение относится к текстильной промьшшенности, а именно к устройствам для экономии тепла в по- точньпс линиях текстильного отделочного производства, и позволяет повысить надежность работы. Аппарат содержит емкость с размещенными в ней вертикальными теплообменниками, вы-, полненными подпружиненными. Кривошип привода установлен на приводном валу свободно и соединен с последним посредством поводка, который закреплен жестко на приводном валу, а с кривошипом связан посредством эластичного амортизато1 а. Для движения теплообменников приводной вал равномерно вращается, при этом поводок через эластичный амортизатор давит на кривошип, заставляя его поворачиваться. Кривошип передает через рычажную систему привода движение теплообменникам. Свободная установка . кривошипа на валу позволяет передавать от приводного вала крутящий момент только одного знака - только со стороны давящего на него поводка . 5 ил. о (Q (Л
ф
ГЧ)
Изобретение относится к текстиль™ Ной промышленности, а именно к уст- р|ойствам для экономии тепла в поточ tteix линиях текстильного отделочного Производствао
Целью изобретения является повы- шение надежности работы за счет предотвращения смены знака момента на сК-и кривошипа при прокоде им мертвого
сложения е
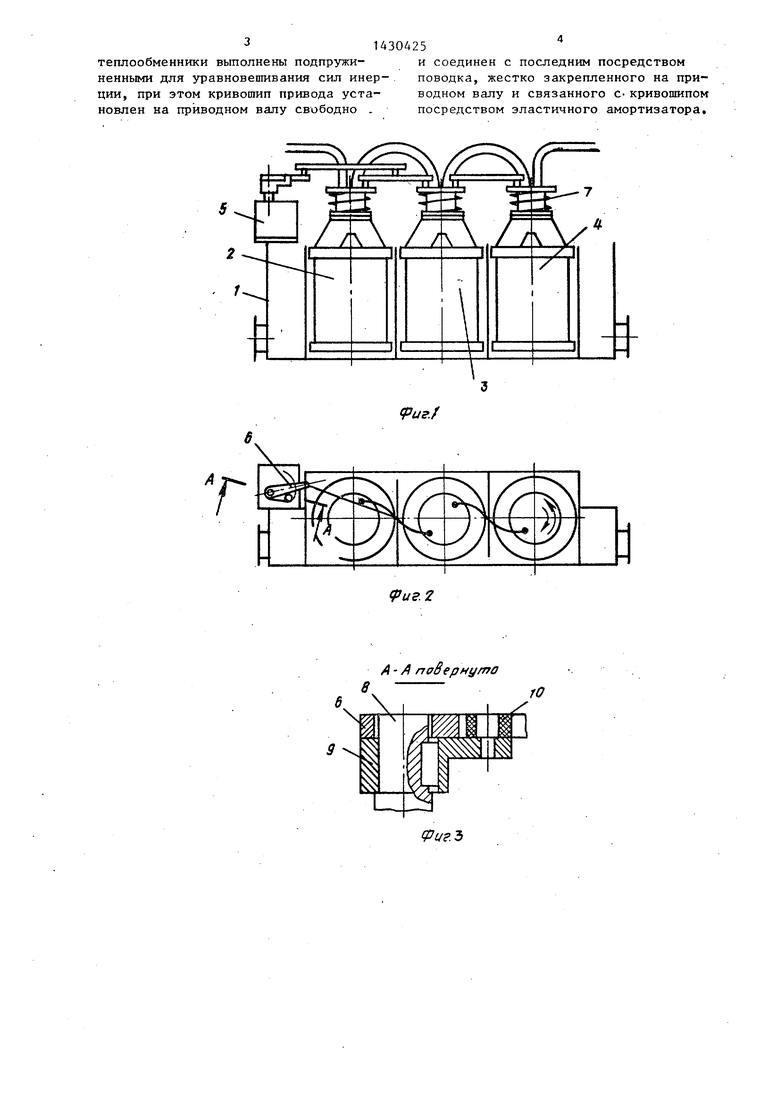
На фигЛ изображен рекуперационный
лпараТр вид сбоку на - то же сверхуJ на фиг„3 разрез на
иг,2- на фиг,4 график зависимости поворота теплообменника от вре™ Нгени; на. фиг,5 - график зависимости дт времени угла поворота кривошипа rt поводкао
Рекуперационный аппарат содержит емкость 1 для сбора горячих отработанных растворов с размещенными в ней вертикальными тeплooбмeнникa и 2-45 связанными с приводом 5 их возвратно- вращательного движения, вьшолненным в виде рычажного механизма с задамдим кривошипом 6 и уравновешиванием сил инерции посредством пружины 7 Криво ПИП 6 установлен на приводном вапу 8 CJ возможностью свободного вращения и связ ан с ним посредством поводка 9} который жестко закреплен на приводном валу 8 Поводок 9 контактирует с сдней из сторон кривошипа 6 через зластичный амортизатор 10„
I Аппарат работает следую1Ц1-1м образом,
Горячие отработанные растворь из технологического оборудования прохо- ят через емкость 1 Навстречу им по 1 Еплообменникам 2-4 движется свежая 1Юда из водопровода , .и,, пройдя все теплообменники, уходит в то же технологическое оборудов ание Для интен с1ификации теплообмена между отрабо- анным раствором и свежей водой,, а ракже для предотвращения -оседания за Грязнений из раствора на поверхностя теплообменников последние приводятся I возвратно-вращательное движение Это достигается теМд что приводной нал 8 равномерно вращается жестко сидящий на нем поводок 9 через элас- ичный амортизатор 10 давит на кривошип б, заставляя его поворачиваться о Кривошип 6 передает через рычажную (Систему привода 5 движение теплообменникам 2-45 заставляя их двигаться
1 озвратно-вращательно,
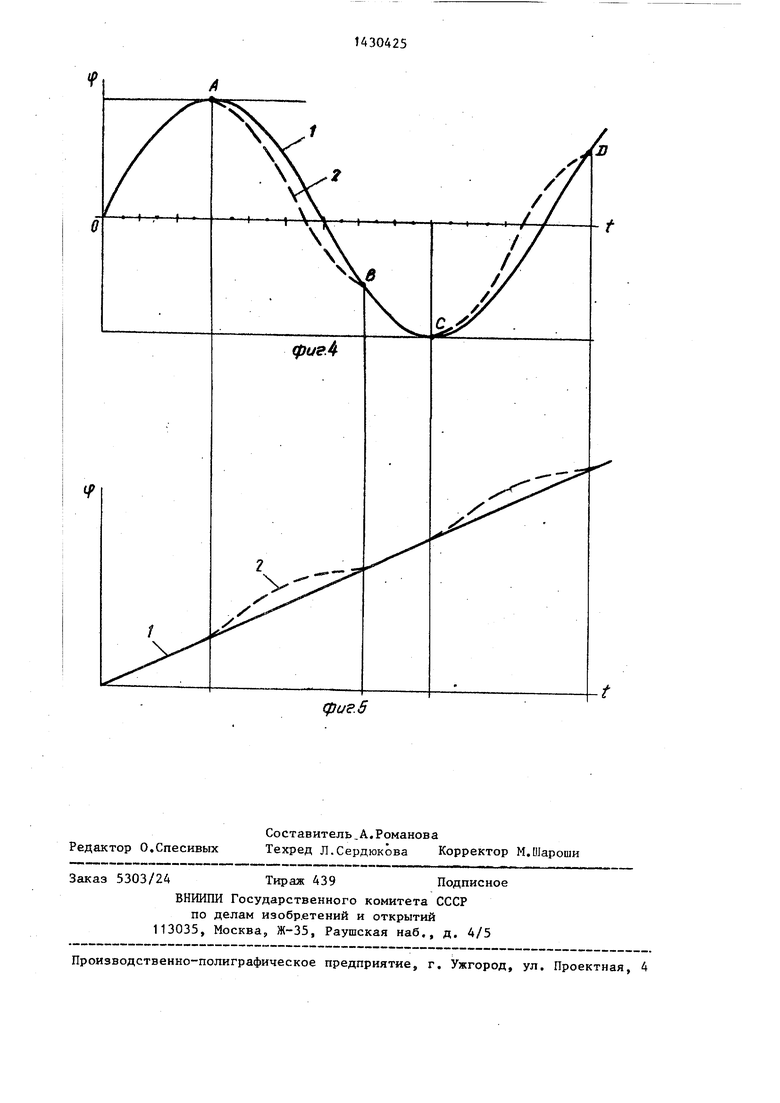
Однако ввиду неизбежного несовпадения действительных характеристик пружин 7 с расчетными эти пружины в крайних положениях теплообменников неадекватно компенсируют моменты от сил инерции масс теплообменников. Если пружины сильнее, чем необходимо (или слабее, что принципиального значения не имеет) на очень незначительную величину (см. фиг.4). При пуске первую четверть периода от точки О до точки А теплообменники движутся по закону кривой 1, когда поводок 9 не отходит от кривошипа 6, так как этому отходу препятствует избыточная сила пружин 7. В точке А н аступает первое мертвое положение. Далее благодаря тем же избыточным силам пружин 7 кривошип 6 пойдет быстрее поводка 9 и теплообменники станут двигаться в соответствии с кривой 2. При этом;на приводной вал 8 момент противоположного знака не передается, так как кривошип 6 с ним расцепился и ва- sry 8 не потребуется тормозить кривошип 6, Стука и дополнительного износа передач редуктора не будет, |
Но движение в соответствии с законом кривой 2 ввиду малости превьш1е- ния сил пружин и значительного трения теплообменников о воду в емкости 1 долго про/должаться не может. На фиг.5 показано, как кривошип 6 двигаясь по закону кривой 2 затем догоняется поводком 9, двигающимся по закону кривой 1с В точке Б (фиг,4) поводок 9 догонит кривошип 6, небол зшое несоответствие в скоростях гасится амортизатором 10, и от точки В до следующего мертвого положения - точки С - движение кривошипа и поводка опять идет совместно, С точки С далее все повторяется.
Таким образом, вал В только разгоняет механизм и никогда его не тормозит Смена знака момента на валу 8 принципиально исключена,.
Формула изобретения
Рекуперационный аппарат для текстильных отделочных машин по авт.ев, № 1395710., отличающийся тем, что, с целью повышения надежности работы за счет предотвращения смены знака момента на оси кривошипа при проходе им мертвого положения.
31430425
теплообменники выполнены подпружи- и соединен с последним посредством ненными для уравновепшвания сил инер- поводка, жестко закрепленного на при- ции, при этом кривошип привода уста- водном валу и связанного с- кривошипом новлен на приводном валу свободно . посредством эластичного амортизатора.
fi/г/
(риг. 2
А- А прВернуто
ФигЪ
f
фиг 5
