Изобретение относится к текстильной промышленности и может быть использовано в приводах гибких и жестких рапир ткацких станков.
Цель изобретения - упрощение и повышение надежности конструкции.
Предлагаемый привод рапиры является плоским шарнирно-рычажным механизмом и может быть изготовлен по традиционной технологии. Наличие только вращательных пар позволяет применять стандартные подшипники качения или скольжения. Это определяет высокую надежность и ремонтопригодность механизма, а его звенья, работающие в основном на растяжение-сжатие, обеспечивают высокую жесткость привода и точность перемещения рапиры.
Выбор размеров звеньев в указанных выше пределах обеспечивает работу механизма в окрестностях точки, где коромысло лежит на линии, проходящей через ось его вращения и ось вращения поводка, при условии превышения длины коромысла расстояния между этими осями. В этом случае происходит максимальное приращение передаточного числа от коромысла к поводку
с вращением их в одну сторону. Как следствие этого, поворот поводка происходит на значительно больший угол, чем коромысла. Кроме того, происходит быстрое замедление вращения поводка до полной его остановки при подходе к точке совпадения линий коромысла и серьги. Это обеспечивает при совместной работе с кривошипно-ко- ромысловым механизмом необходимый условный выстой рапиры и достаточно близкий к оптимальному закон ее движения. Выход размеров звеньев за указанные выше пределы не позволяет коромыслу проходить точку максимального сближения его крайнего шарнира с неподвижным шарниром по водка (осью вращения шестерни рапиры), что разбивает область существования механизма на две части. Так при работе механизма, не доходя указанной точки, полностью отсутствует выстой поводка (рапиры) и уменьшается не менее чем в 1,5 раза угол его качания. При работе в зоне за точкой угол качания уменьшается не менее чем в два раза.
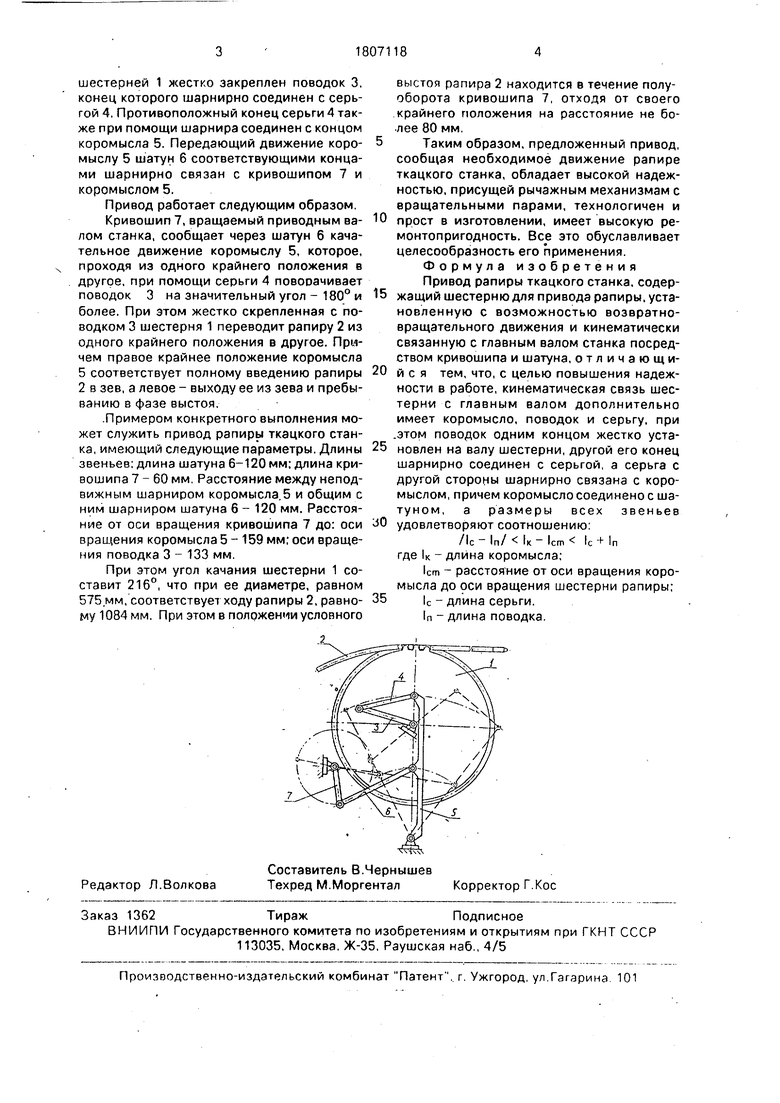
На чертеже изображен привод рапиры. Он содержит шестерню 1 рапиры, приводящую в движение рапиру 2. На одной оси с
ел С
оо
Р N
оо
шестерней 1 жестко закреплен поводок 3, конец которого шарнирно соединен с серьгой 4, Противоположный конец серьги 4 также при помощи шарнира соединен с концом коромысла 5. Передающий движение коромыслу 5 шатун б соответствующими концами шарнирно связан с кривошипом 7 и коромыслом 5.
Привод работает следующим образом.
Кривошип 7, вращаемый приводным валом станка, сообщает через шатун 6 кача- тельное движение коромыслу 5, которое, проходя из одного крайнего положения в другое, при помощи серьги 4 поворачивает поводок 3 на значительный угол - 180° и более. При этом жестко скрепленная с поводком 3 шестерня 1 переводит рапиру 2 из одного крайнего положения в другое. Причем правое крайнее положение коромысла 5 соответствует полному введению рапиры 2 в зев, а левое - выходу ее из зева и пребыванию в фазе выстоя.
.Примером конкретного выполнения может служить привод рапиры ткацкого станка, имеющий следующие параметры. Длины звеньев: длина шатуна 6-120 мм; длина кривошипа 7-60 мм. Расстояние между неподвижным шарниром коромысла.5 и общим с ним шарниром шатуна б - 120 мм. Расстояние от оси вращения кривошипа 7 до: оси вращения коромысла 5 - 159 мм; оси вращения поводка 3 - 133 мм.
При этом угол качания шестерни 1 составит 216°, что при ее диаметре, равном 575.мм, соответствует ходу рапиры 2, равному 1084 мм. При этом в положении условного
0
выстоя рапира 2 находится в течение полуоборота кривошипа 7, отходя от своего крайнего положения на расстояние не бо- лее 80 мм.
Таким образом, предложенный привод, сообщая необходимое движение рапире ткацкого станка, обладает высокой надежностью, присущей рычажным механизмам с вращательными парами, технологичен и прост в изготовлении, имеет высокую ремонтопригодность. Все это обуславливает целесообразность его применения. Формула изобретения Привод рапиры ткацкого станка, содер5 жащий шестерню для привода рапиры, установленную с возможностью возвратно- вращательного движения и кинематически связанную с главным валом станка посредством кривошипа и шатуна, отличающи0 и с я тем, что, с целью повышения надежности в работе, кинематическая связь шестерни с главным валом дополнительно имеет коромысло, поводок и серьгу, при этом поводок одним концом жестко установлен на валу шестерни, другой его конец шарнирно соединен с серьгой, а серьга с другой стороны шарнирно связана с коромыслом, причем коромысло соединено с шатуном, а размеры всех звеньев удовлетворяют соотношению:
/Ic- In/ IK- Icm lc + In
где 1К - длина коромысла;
Icm - расстояние от оси вращения коромысла до оси вращения шестерни рапиры; 5 |с - длина серьги.
In - длина поводка.
5
0
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ТРАНСПОРТИРОВАНИЯ ТКАНИ ШВЕЙНОЙ МАШИНЫ (2 ВАРИАНТА) | 2004 |
|
RU2281352C1 |
| ШАТУННО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ В.А. ВОРОГУШИНА | 2007 |
|
RU2351784C2 |
| Устройство компенсации уточных нитей к многоцветному бесчелночному ткацкому станку | 1985 |
|
SU1606546A1 |
| Устройство компенсации уточных нитей к многоцветному бесчелночному ткацкому станку | 1985 |
|
SU1286650A1 |
| Устройство привода рапиры к ткацкому станку | 1988 |
|
SU1509442A1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2338104C1 |
| БОЕВОЙ МЕХАНИЗМ БЕСЧЕЛНОЧНОГО ТКАЦКОГО СТАНКА | 1996 |
|
RU2107762C1 |
| Привод рапиры ткацкого станка | 1983 |
|
SU1121331A1 |
| Ремизоподъемная каретка для ткацкого станка | 1979 |
|
SU1285083A1 |
| Рапирный механизм ткацкого станка | 1991 |
|
SU1771492A3 |
Сущность изобретения: привод рапиры ткацкого станка содержит шестерню для рапиры, закрепленный на одной оси с шестерней поводок и шарнирно соединенную с ним серьгу. Серьга связана с коромыслом, а коромысло связано с шатуном кривошипного механизма. 1 ил.
| Привод рапир ткацкого станка | 1976 |
|
SU662024A3 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
