Изобретение относится к текстильной промышленности, а именно к аппаратам для рекуперации тепла сточных вод текстильных отделочных машин.
Известен рекуперационный аппарат для текстильных отделочных машин, содержащий емкость для сбора горячих отработанных растворов с размещенным в ней теплообменником, связанным с приводом его возвратно-вращательного движения, выполненным в виде шарнирного четырех- звенника.
Для разгружения движущихся звеньев от инерционных нагрузок в аппарате применена пружина кручения.
Недостатком этого аппарата является низкая надежность пружины и эффективность ее только при достаточно точном совпадении собственной и вынужденной частот движения. Кроме того, для разгружения при пуске и остановке одной пружины недостаточно. Жесткая связь всех звеньев в шарнирном четырехзвеннике мешает плавному пуску и торможению.
Более прогрессивным аппаратом является рекуперационный аппарат для текстильных отделочных машин, содержащий емкость для сбора горячих отработанных растворов с размещенным в ней теплообменником, связанным с приводом кривошипа для его возвратно-вращательного движения относительно оси вращения теплообменника через авторезонансный механизм в виде маятника гравитационного типа, жестко соединенного с осью вращения теплообменника.
х XI го ю ел
N0
В предлагаемом аппарате ненадежная пружина заменена надежным маятником, но привод по-прежнему остался жестким, и если теплообменник от загрязнений заклинит, то механизм сломается. Если же собственная частота теплообменника с маятником и вынужденная частота привода не совпадают, в звеньях привода и теплообменника возникают некомпенсированные инерционные усилия. Решение этого вопроса чисто механическим путем (соединение четырехзеенника с маятником через маховик) не освобождает от инерционных усилий, порождаемых несинусноетью привода. Содать же идеально синусный механизм крайне сложно.
Устройство известного аппарата имеет недостаток, выражающийся в некомпенсированное™ инерционных усилий, снижаю- щих надежность аппарата.
Целью изобретения является повышение надежности за счет разгружения движущихся звеньев рекуперациейного аппарата от инерционных нагрузок при несовпадении собственной и вынужденной частот.
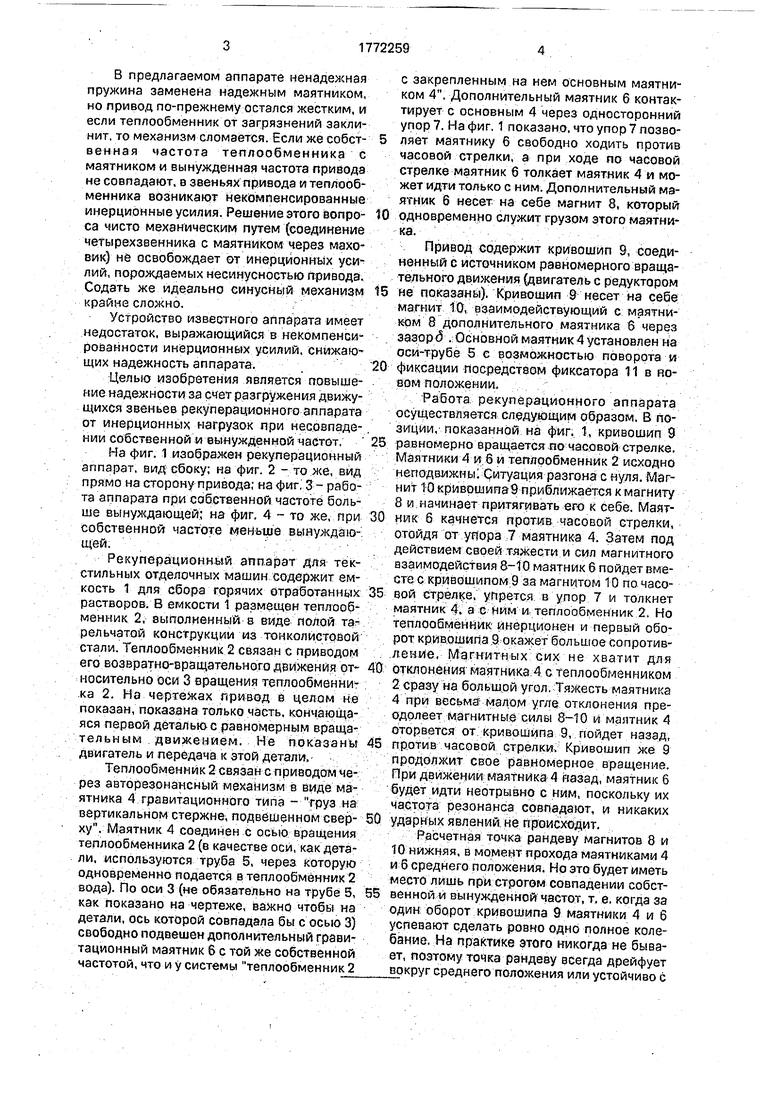
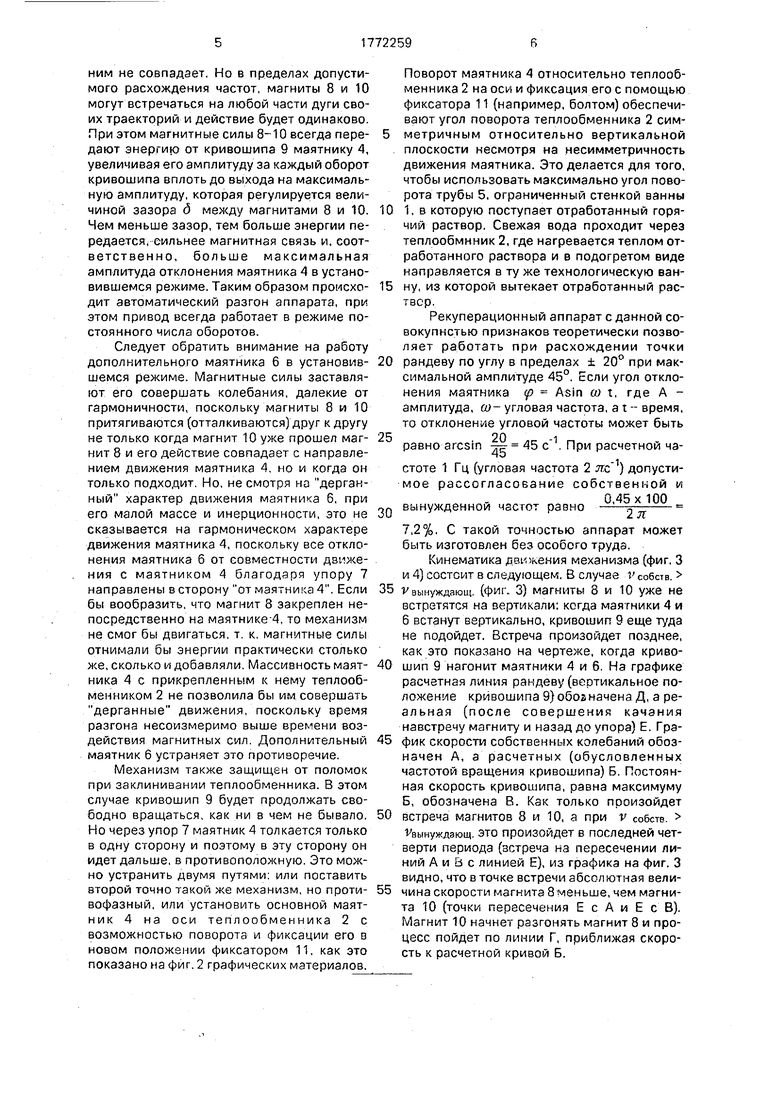
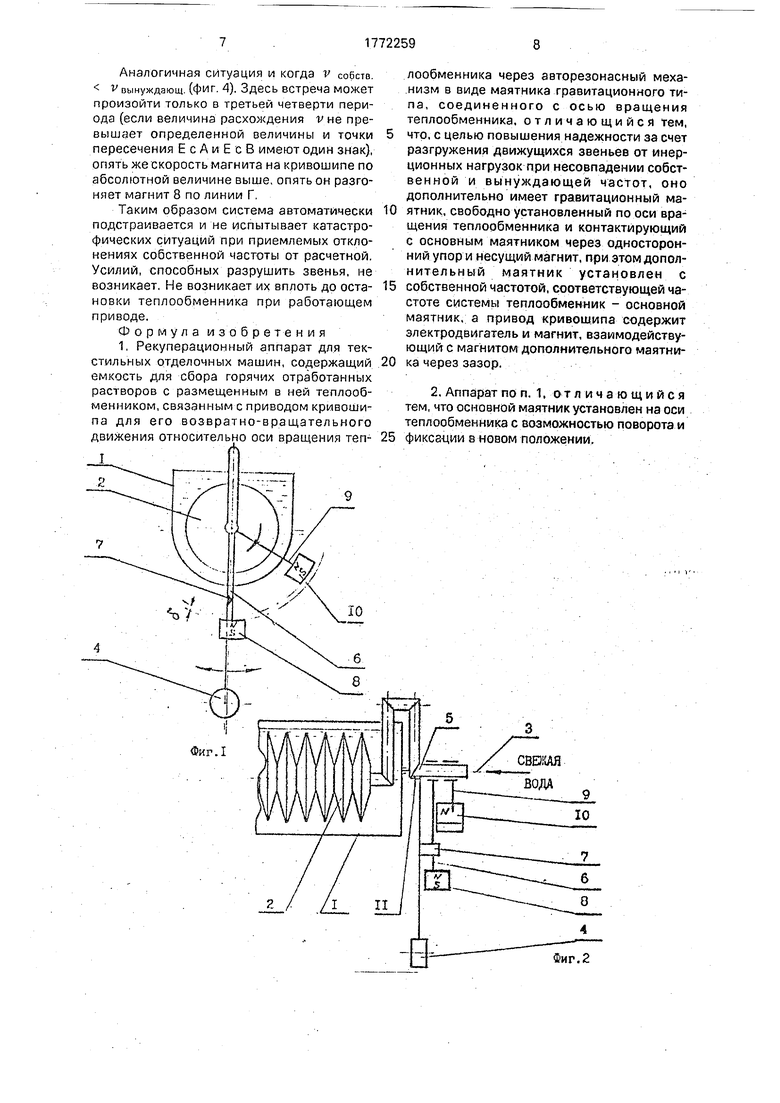
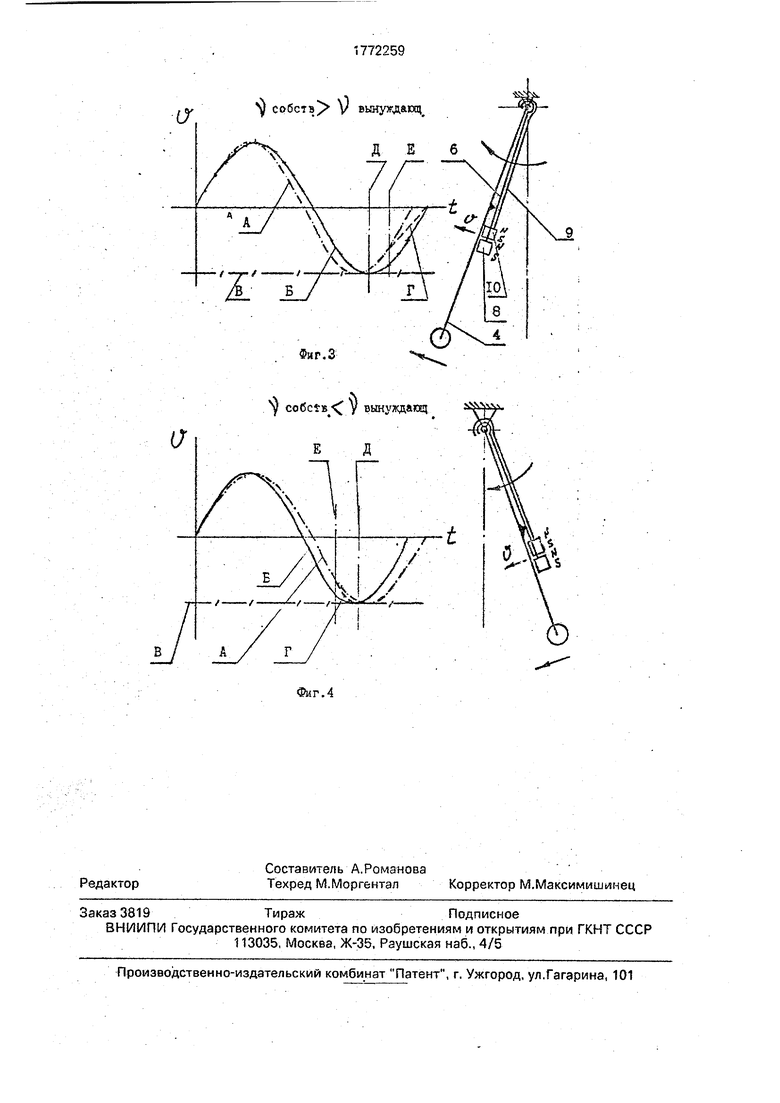
На фиг. 1 изображен рекуперационный аппарат, вид сбоку; на фиг. 2 - то же, вид прямо на сторону привода; на фиг. 3 - работа аппарата при собственной частоте больше вынуждающей; на фиг. 4 - то же, при собстеенной частоте меньше вынуждающей.
Рекуперационный аппарат для текстильных отделочных машин содержит емкость 1 для сбора горячих отработанных растворов. В емкости 1 размещен теплообменник 2, выполненный в виде полой тарельчатой конструкции из тонколистовой стали. Теплообменник 2 связан с приводом его возвратно-вращательного движения относительно оси 3 вращения теплообменника 2. На чертежах привод е целом не показан, показана только часть, кончающаяся первой деталью с равномерным вращательным движением. Не показаны двигатель и передача к этой детали.
Теплообменник 2 связан с приводом через авторезонансный механизм в виде маятника 4 гравитационного типа - груз на вертикальном стержне, подвешенном сверху. Маятник 4 соединен с осью вращения теплообменника 2 (в качестве оси, как детали, используются труба 5, через которую одновременно подается в теплообменник 2 вода). По оси 3 (не обязательно на трубе 5, как показано на чертеже, важно чтобы на детали, ось которой совпадала бы с осью 3) свободно подвешен дополнительный гравитационный маятник б с той же собственной частотой, что и у системы теплообменник 2
с закрепленным на нем основным маятником 4. Дополнительный маятник б контактирует с основным 4 через односторонний упор 7. На фиг. 1 показано, что упор 7 позволяет маятнику 6 свободно ходить против часовой стрелки, а при ходе по часовой стрелке маятник б толкает маятник 4 и может идти только с ним. Дополнительный маятник 6 несет на себе магнит 8, который
0 одновременно служит грузом этого маятника.
Привод содержит кривошип 9, соединенный с источником равномерного вращательного движения (двигатель с редуктором
5 не показаны). Кривошип 9 несет на себе магнит 10, взаимодействующий с маятником 8 дополнительного маятника 5 через зазорд , Основной маятник 4 установлен на оси-трубе 5 с возможностью поворота и
0 фиксации посредством фиксатора 11 в RO- вом положении.
Работа рекуперационного аппарата осуществляется следующим образом. В позиции, показанной на фиг. 1, кривошип 9
В равномерно вращается по часовой стрелке. Маятники 4 и 6 и теплообменник 2 исходно неподвижны; Ситуация разгона с нуля. Магнит 10 кривошипаЭ приближается к магниту 8 и начинает притягивать его к себе. Маят0 ник 6 качнется против часовой стрелки, отойдя от упора 7 маятника 4. Затем под действием своей тяжести и сил магнитного взаимодействия 8-10 маятник б пойдет вместе с кривошипом 9 за магнитом 10 по часо5 вой стрелке, упрется в упор 7 и толкнет маятник 4, а с ним и теплообменник 2. Но теплообменник инерционен и первый оборот кривошипа 9 окажет большое сопротивление. Магнитных сих не хватит для
0 отклонения маятника 4 с теплообменником 2 сразу на большой угол. Тяжесть маятника 4 при весьма малом угле отклонения преодолеет магнитные силы 8-10 и маятник 4 оторвется от кривошипа 9, пойдет назад,
5 против часовой стрелки Кривошип же 9 продолжит свое равномерное вращение. При движении маятника 4 назад, маятник 6 будет идти неотрывно с ним, поскольку их частота резонанса совпадают, и никаких
0 ударных явлений.не происходит.
Расчетная точка рандеву магнитов 8 и 10 нижняя, в момент прохода маятниками 4 и 6 среднего положения. Но это будет иметь место лишь при строгом совпадении собст5 венной и вынужденной частот, т, е. когда за один оборот кривошипа 9 маятники 4 и 6 успевают сделать ровно одно полное колебание. На практике этого никогда не бывает, поэтому точка рандеву всегда дрейфует вокруг среднего положения или устойчиво с
ним не совпадает. Но в пределах допустимого расхождения частот, магниты 8 и 10 могут встречаться на любой части дуги своих траекторий и действие будет одинаково. При этом магнитные силы 8-10 всегда передают энергию от кривошипа 9 маятнику 4, увеличивая его амплитуду за каждый оборот кривошипа вплоть до выхода на максимальную амплитуду, которая регулируется величиной зазора д между магнитами 8 и 10. Чем меньше зазор, тем больше энергии передается, сильнее магнитная связь и, соответственно, больше максимальная амплитуда отклонения маятника А в установившемся режиме. Таким образом происходит автоматический разгон аппарата, при этом привод всегда работает в режиме постоянного числа оборотов.
Следует обратить внимание на работу дополнительного маятника 6 в установившемся режиме. Магнитные силы заставляют его совершать колебания, далекие от гармоничности, поскольку магниты 8 и 10 притягиваются (отталкиваются) друг к другу не только когда магнит 10 уже прошел магнит 8 и его действие совпадает с направлением движения маятника 4, но и когда он только подходит. Но, не смотря на дерганный характер движения маятника 6, при его малой массе и инерционности, это не сказывается на гармоническом характере движения, маятника 4, поскольку все отклонения маятника б от совместности движения с маятником 4 благодаря упору 7 направлены в сторону от маятника 4. Если бы вообразить, что магнит 8 закреплен непосредственно на маятнике-4, то механизм не смог бы двигаться, т. к. магнитные силы отнимали бы энергии практически столько же, сколько и добавляли. Массивность маятника 4 с прикрепленным к нему теплообменником 2 не позволила бы им совершать дерганные движения, поскольку время разгона несоизмеримо выше времени воздействия магнитных сил. Дополнительный маятник 6 устраняет это противоречие.
Механизм также защищен от поломок при заклинивании теплообменника. В этом случае кривошип 9 будет продолжать свободно вращаться, как ни в чем не бывало. Но через упор 7 маятник 4 толкается только в одну сторону и поэтому в эту сторону он идет дальше, в противоположную. Это можно устранить двумя путями: или поставить второй точно такой же механизм, но противофазный, или установить основной маятник 4 на оси теплообменника 2 с возможностью поворота и фиксации его в новом положении фиксатором 11, как это показано на фиг. 2 графических материалов.
Поворот маятника 4 относительно теплообменника 2 на оси и фиксация его с помощью фиксатора 11 (например, болтом) обеспечивают угол поворота теплообменника 2 симметричным относительно вертикальной плоскости несмотря на несимметричность движения маятника. Это делается для того, чтобы использовать максимально угол поворота трубы 5, ограниченный стенкой ванны
0 1, в которую поступает отработанный горячий раствор. Свежая вода проходит через теплообмнник 2, где нагревается теплом отработанного раствора и в подогретом виде направляется в ту же технологическую ван5 ну, из которой вытекает отработанный раствор.
Рекуперационный аппарат с данной со- вокупнстью признаков теоретически позволяет работать при расхождении точки
0 рандеву по углу в пределах ± 20° при максимальной амплитуде 45°. Если угол отклонения маятника р Asin a) t, где А - амплитуда, w- угловая частота, at-- время, то отклонение угловой частоты может быть
5
0
45 с 1 45 ЧЬС
равно arcsin Ј 45 с . При расчетной
стоте 1 Гц (угловая частота 2 лс ) допустимое рассогласование собственной и
0,45 х 100
вынужденной частот равно
2я
7,2%. С такой точностью аппарат может быть изготовлен без особого труда.
Кинематика движения механизма (фиг. 3 и 4) состоит в следующем. В случае v собств.
v вынуждающ. (фиг. 3) магниты 8 и 10 уже не встретятся на вертикали: когда маятники 4 и 6 встанут вертикально, кривошип 9 еще руда не подойдет. Встреча произойдет позднее, как это показано на чертеже, когда кривошип 9 нагонит маятники 4 и 6. На графике расчетная линия рандеву (вертикальное положение кривошипа 9}обоаначена Д, а реальная (после совершения качания навстречу магниту и назад до упора) Е. График скорости собственных колебаний обозначен А, а расчетных (обусловленных частотой вращения кривошипа) Б. Постоянная скорость кривошипа, равна максимуму Б, обозначена В. Как только произойдет
встреча магнитов 8 и 10, а при v собств. аынуждзющ. это произойдет в последней четверти периода (встреча на пересечении линий А и В с линией Е), из графика на фиг. 3 видно, что в точке встречи абсолютная величина скорости магнита 8 меньше, чем магнита 10 (точки пересечения Е с А и Е с В). Магнит 10 начнет разгонять магнит 8 и процесс пойдет по линии Г, приближая скорость к расчетной кривой Б.
Аналогичная ситуация и когда v собств оынуждающ (фиг 4). Здесь встреча может произойти только в третьей четверти периода (если величина расхождения v не превышает определенной величины и точки пересечения Е с А и Е с В имеют один знак), опять же скорость магнита на кривошипе по абсолютной величине выше, опять он разгоняет магнит 8 по линии Г
Таким образом система автоматически подстраивается и не испытывает катастрофических ситуаций при приемлемых отклонениях собственной частоты от расчетной. Усилий, способных разрушить звенья, не возникает. Не возникает их вплоть до остановки теплообменника при работающем приводе.
Формула изобретения
1, Рекуперационный аппарат для текстильных отделочных машин, содержащий емкость для сбора горячих отработанных растворов с размещенным в ней теплообменником, связанным с приводом кривошипа для его возвратно-вращательного движения относительно оси вращения теплообменника через авторезонасный механизм в виде маятника гравитационного типа, соединенного с осью вращения теплообменника, отличающийся тем,
что, с целью повышения надежности за счет разгружения движущихся звеньев от инерционных нагрузок при несовпадении собст- венной и вынуждающей частот, оно дополнительно имеет гравитационный маятник, свободно установленный по оси вращения теплообменника и контактирующий с основным маятником через односторонний упор и несущий магнит, при этом дополнительный маятник установлен с
собственной частотой, соответствующей частоте системы теплообменник - основной маятник, а привод кривошипа содержит электродвигатель и магнит, взаимодействующий с магнитом дополнительного маятника через зазор.
2, Аппарат по п. 1, отличающийся тем, что основной маятник установлен на оси теплообменника с возможностью поворота и фиксации в новом положении.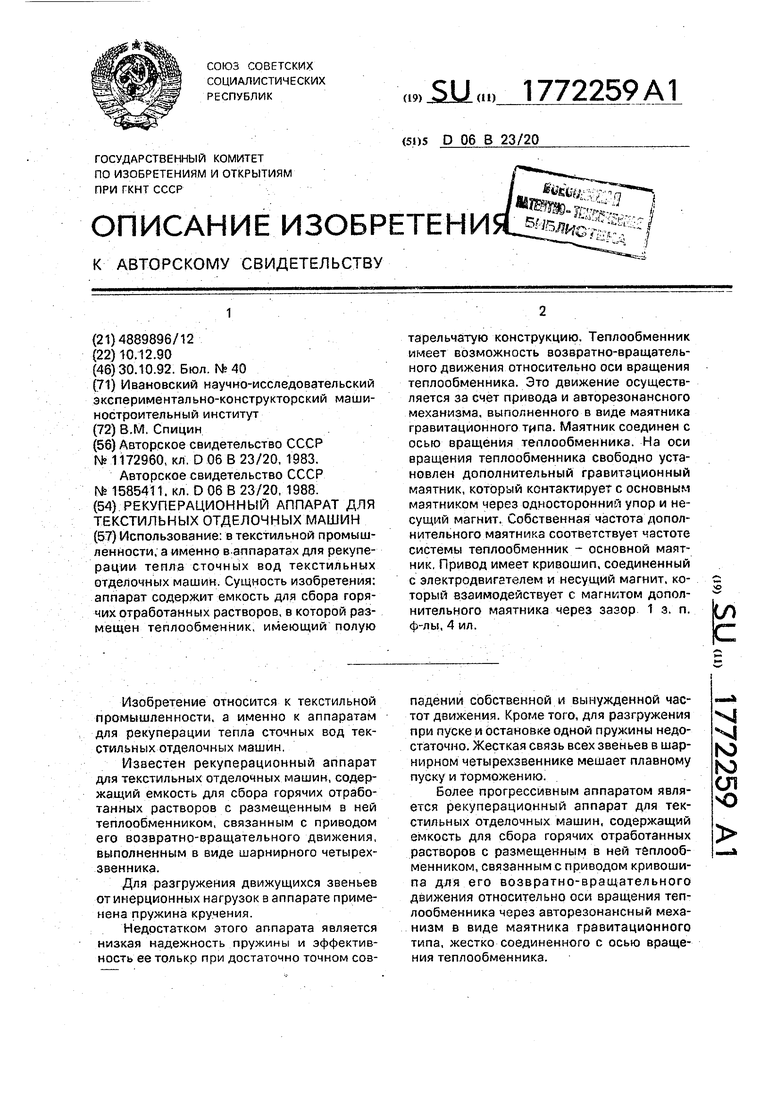
| название | год | авторы | номер документа |
|---|---|---|---|
| Рекуперационный аппарат для текстильных отделочных машин | 1988 |
|
SU1585411A1 |
| РЕКУПЕРАЦИОННЫЙ АППАРАТ ДЛЯ ТЕКСТИЛЬНЫХ ОТДЕЛОЧНЫХ МАШИН | 1991 |
|
RU2018553C1 |
| Рекуперационный аппарат для текстильных отделочных машин | 1990 |
|
SU1772260A1 |
| Рекуперационный аппарат для текстильных отделочных машин | 1986 |
|
SU1395710A1 |
| Рекуперационный аппарат для текстильных отделочных машин | 1990 |
|
SU1745786A1 |
| Рекуперационный аппарат для текстильных отделочных машин | 1989 |
|
SU1671751A1 |
| Рекуперационный аппарат для текстильных отделочных машин | 1983 |
|
SU1172960A1 |
| Рекуперационный аппарат для текстильных отделочных машин | 1985 |
|
SU1285090A1 |
| РЕКУПЕРАЦИОННЫЙ АППАРАТ ДЛЯ ТЕКСТИЛЬНЫХ ОТДЕЛОЧНЫХ МАШИН | 1993 |
|
RU2037589C1 |
| Рекуперационный аппарат для текстильных отделочных машин | 1986 |
|
SU1430425A2 |
Использование: в текстильной промышленности, а именно в аппаратах для рекуперации тепла сточных вод текстильных отделочных машин. Сущность изобретения: аппарат содержит емкость для сбора горячих отработанных растворов, в которой размещен теплообменник, имеющий полую тарельчатую конструкцию. Теплообменник имеет возможность возвратно-вращательного движения относительно оси вращения теплообменника. Это движение осуществляется за счет привода и авторезонансного механизма, выполненного в виде маятника гравитационного типа. Маятник соединен с осью вращения теплообменника. На оси вращения теплообменника свободно установлен дополнительный гравитационный маятник, который контактирует с основным маятником через односторонний упор и несущий магнит. Собственная частота дополнительного маятника соответствует частоте системы теплообменник - основной маятник. Привод имеет кривошип, соединенный с электродвигателем и несущий магнит, который взаимодействует с магнитом дополнительного маятника через зазор 1 з. п. ф-лы, 4 ил. Ю С
(У
у собств V вынуждай
Д Е 6
Фиг.З
U
у у вынуждащ ЕД
| Рекуперационный аппарат для текстильных отделочных машин | 1983 |
|
SU1172960A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Рекуперационный аппарат для текстильных отделочных машин | 1988 |
|
SU1585411A1 |
| кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
