Изобретение относится к электротехнике, а именно к автоматизированному электроприводу, и может быть использовано в системах управления подвижных объектов.
Целью изобретения является повышение точности стабилизации частоты вращения и быстродействия.
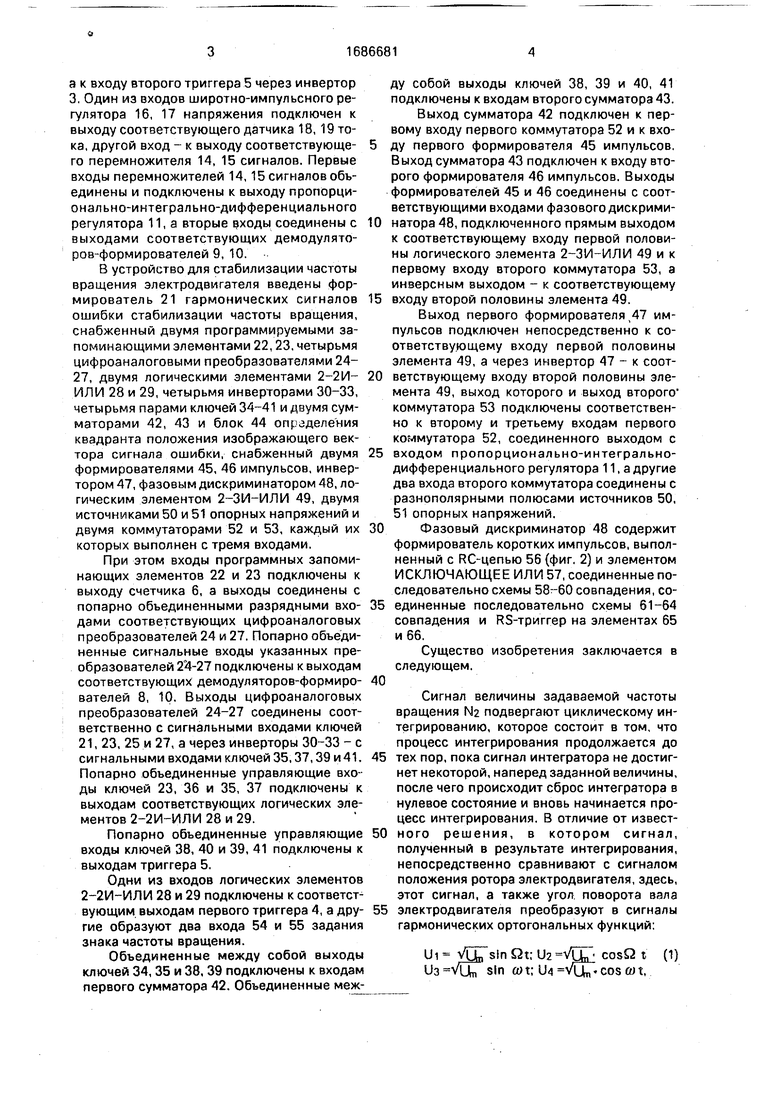
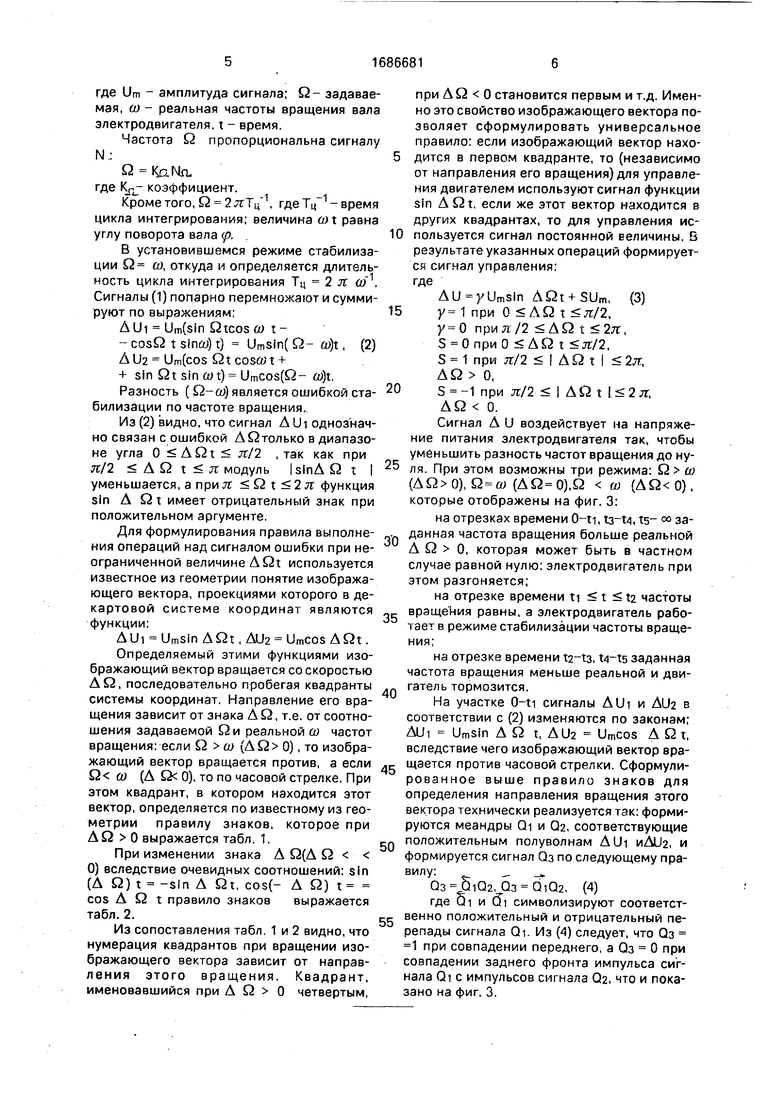
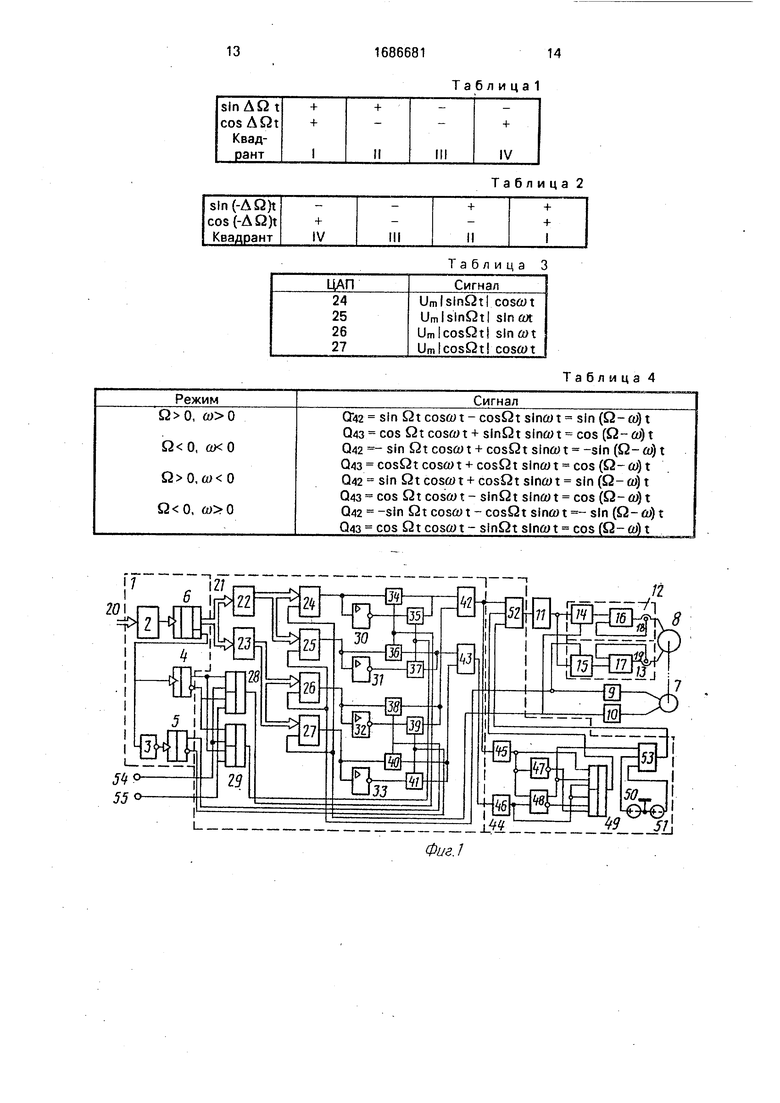
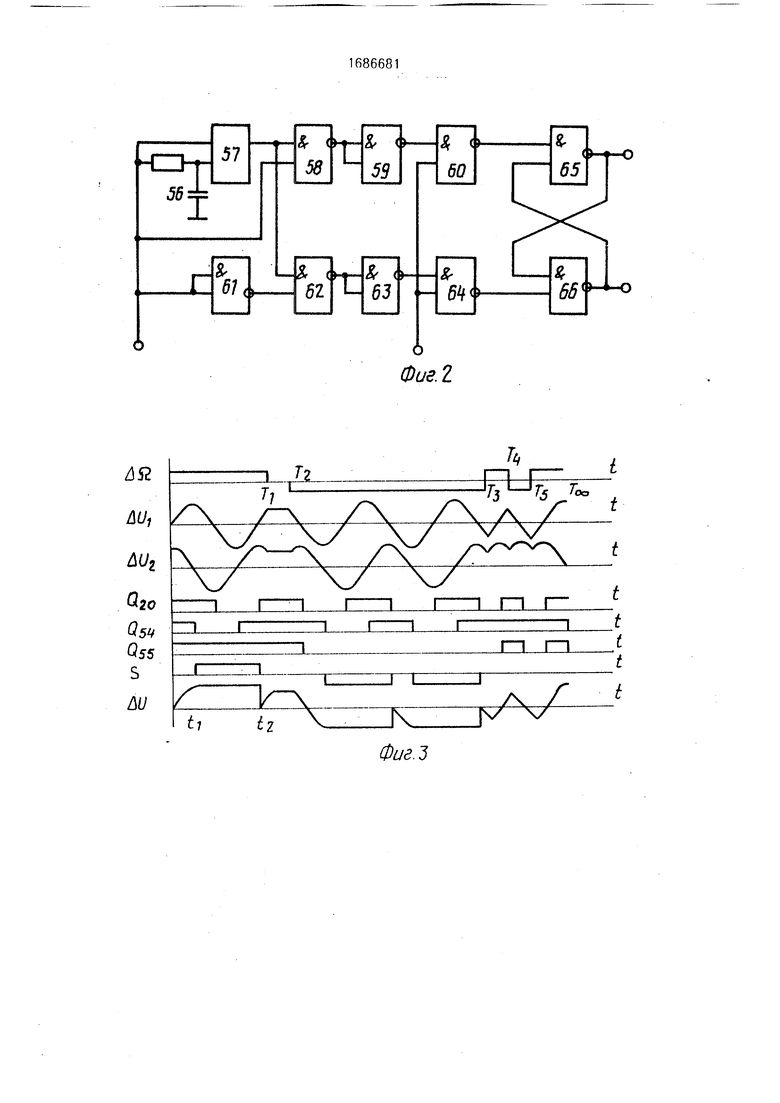
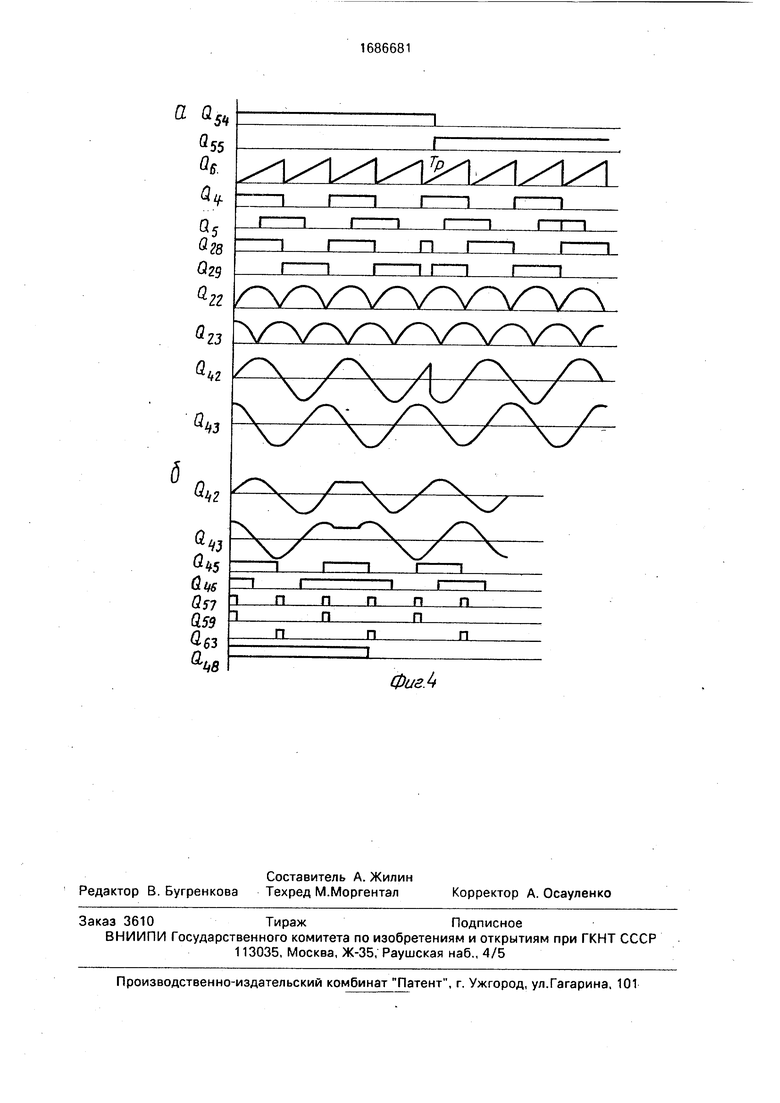
На фиг. 1 представлена функциональная схема устройства для стабилизации частоты вращения электродвигателя; на, фиг. 2 - схема фазового дискриминатора; на фиг. 3 и 4 - диаграммы, поясняющие работу устройства.
Устройство для стабилизации частоты вращения электродвигателя содержит блок 1 циклического интегрирования (фиг. 1), выполненный с преобразователем 2 код - частота, инвертором 3, триггерами 4 и 5 и
счетчиком 6, датчик 7 углового положения, предназначенный для установки на валу электродвигателя 8 и подключенный каждым из выходов к входу соответствующего демодулятора-формирователя 9, 10, про- лорционально-интегрально-дифференциэ- льный регулятор 11 и регуляторы 12 и 13 тока, каждый из которых выполнен с перемножителем 14 и 15 сигналов, широтно-им- пульсным регулятором 16, 17 напряжения и датчиком 18, 19 тока, предназначенным для установки в соответствующую фазу электродвигателя 8. При этом вход счетчика 6 подключен к выходу преобразователя 2 код - частота, вход которого образует вход 20 задания величины частоты вращения. Выход старшего разряда счетчика 6 подключен к входу первого триггера 4 непосредственно.
Р4
СО
Оч
о
00
а к входу второго триггера 5 через инвертор 3. Один из входов широтно-импульсного регулятора 16, 17 напряжения подключен к выходу соответствующего датчика 18,19 тока, другой вход - к выходу соответствующего перемножителя 14, 15 сигналов. Первые входы перемножителей 14,15 сигналов объединены и подключены к выходу пропорционально-интегрально-дифференциальногорегулятора 11, а вторые входы соединены с выходами соответствующих демодуляторов-формирователей 9, 10.
В устройство для стабилизации частоты вращения электродвигателя введены формирователь 21 гармонических сигналов ошибки стабилизации частоты вращения, снабженный двумя программируемыми запоминающими элементами 22,23, четырьмя цифроаналоговыми преобразователями 24- 27, двумя логическими элементами 2-2И- ИЛИ 28 и 29, четырьмя инверторами 30-33, четырьмя парами ключей 34-41 и двумя сумматорами 42, 43 и блок 44 определения квадранта положения изображающего вектора сигнала ошибки, снабженный двумя формирователями 45, 46 импульсов, инвертором 47, фазовым дискриминатором 48, логическим элементом 2-ЗИ-ИЛИ 49, двумя источниками 50 и 51 опорных напряжений и двумя коммутаторами 52 и 53, каждый их которых выполнен с тремя входами.
При этом входы программных запоминающих элементов 22 и 23 подключены к выходу счетчика 6, а выходы соединены с попарно объединенными разрядными входами соответствующих цифроаналоговых преобразователей 24 и 27. Попарно объединенные сигнальные входы указанных преобразователей подключены к выходам соответствующих демодуляторов-формирователей 8, 10. Выходы цифроаналоговых преобразователей 24-27 соединены соответственно с сигнальными входами ключей 21, 23, 25 и 27, а через инверторы 30-33 - с сигнальными входами ключей 35,37,39 и41. Попарно объединенные управляющие входы ключей 23, 36 и 35, 37 подключены к выходам соответствующих логических элементов 2-2И-ИЛИ 28 и 29.
Попарно объединенные управляющие входы ключей 38, 40 и 39, 41 подключены к выходам триггера 5,
Одни из входов логических элементов 2-2И-ИЛИ 28 и 29 подключены к соответствующим выходам первого триггера 4, а другие образуют два входа 54 и 55 задания знака частоты вращения.
Объединенные между собой выходы ключей 34, 35 и 38, 39 подключены к входам первого сумматора 42. Объединенные между собой выходы ключей 38, 39 и 40, 41 подключены к входам второго сумматора 43. Выход сумматора 42 подключен к первому входу первого коммутатора 52 и к входу первого формирователя 45 импульсов, Выход сумматора 43 подключен к входу второго формирователя 46 импульсов. Выходы формирователей 45 и 46 соединены с соответствующими входами фазового дискрими0 натора 48, подключенного прямым выходом к соответствующему входу первой половины логического элемента 2-ЗИ-ИЛИ 49 и к первому входу второго коммутатора 53, а инверсным выходом - к соответствующему
5 входу второй половины элемента 49.
Выход первого формирователя импульсов подключен непосредственно к соответствующему входу первой половины элемента 49, а через инвертор 47 - к соот0 ветствующему входу второй половины элемента 49, выход которого и выход второго коммутатора 53 подключены соответственно к второму и третьему входам первого коммутатора 52, соединенного выходом с
5 входом пропорционально-интегрально- дифференциального регулятора 11, а другие два входа второго коммутатора соединены с раснополярными полюсами источников 50, 51 опорных напряжений.
0 Фазовый дискриминатор 48 содержит формирователь коротких импульсов, выполненный с RC-цепью 56 (фиг, 2) и элементом ИСКЛЮЧАЮЩЕЕ ИЛИ 57, соединенные последовательно схемы 58-60 совпадения, со5 единенные последовательно схемы 61-64 совпадения и RS-триггер на элементах 65 и 66.
Существо изобретения заключается в следующем.
0
Сигнал величины задаваемой частоты вращения Ыг подвергают циклическому интегрированию, которое состоит в том, что процесс интегрирования продолжается до
5 тех пор, пока сигнал интегратора не достигнет некоторой, наперед заданной величины, после чего происходит сброс интегратора в нулевое состояние и вновь начинается процесс интегрирования. В отличие от извест0 ного решения, в котором сигнал, полученный в результате интегрирования, непосредственно сравнивают с сигналом положения ротора электродвигателя, здесь, этот сигнал, а также угол поворота вала
5 электродвигателя преобразуют в сигналы гармонических ортогональных функций:
1И - yoTsIn Qt: 1)2 УрГ- cosЈ2 t (1) из VU7 sin o) t; IM Vu. cos w t,
где Um - амплитуда сигнала; Q- задаваемая, а) - реальная частоты вращения вала электродвигателя, t - время.
Частота Q пропорциональна сигналу N :
Q KaNa где Kpj- коэффициент.
Кроме того, Q 2 , где - время цикла интегрирования; величина tot равна углу поворота вала р.
В установившемся режиме стабилизации Q со, откуда и определяется длительность цикла интегрирования Тц 2 л со . Сигналы (1) попарно перемножают и суммируют по выражениям;
AUi Um(sin Qtcosw t- cosQ t sinty) t} UmSin( Q - fy)t, (2)
A U2 Um(cOS Qt COSftJ t +
+ sin Qt sin cot) Umcos(Q- .
Разность ( Q-w) является ошибкой стабилизации по частоте вращения.
Из (2) видно, что сигнал A Ui однозначно связан с ошибкой AQтолько в диапазоне угла 0 AQt л/2 , так как при л/2 A Q t я модуль IsinA Q t t уменьшается, а при л Q t 2 л функция sin A Q t имеет отрицательный знак при положительном аргументе.
Для формулирования правила выполнения операций над сигналом ошибки при неограниченной величине A Qt используется известное из геометрии понятие изображающего вектора, проекциями которого в декартовой системе координат являются функции:
AUi Umsin AQt, AU2 Umcos AQt.
Определяемый этими функциями изображающий вектор вращается со скоростью AQ, последовательно пробегая квадранты системы координат. Направление его вращения зависит от знака АИ, т.е. от соотношения задаваемой QH реальной о) частот вращения; если Q a) (AQ 0), то изображающий вектор вращается против, а если Q ш (А О 0), то по часовой стрелке. При этом квадрант, в котором находится этот вектор, определяется по известному из геометрии правилу знаков, которое при AQ О выражается табл. 1.
При изменении знака A Q(A Q 0) вследствие очевидных соотношений: sin (A Q) t -sin A Qt, cos(- A Q) t cos AQt правило знаков выражается табл. 2.
Из сопоставления табл. 1 и 2 видно, что нумерация квадрантов при вращении изображающего вектора зависит от направления этого вращения. Квадрант, именовавшийся при A Q 0 четвертым,
0
5
0
5
О
5
0
5
0
5
(3)
при AQ 0 становится первым и т.д. Именно это свойство изображающего вектора позволяет сформулировать универсальное правило: если изображающий вектор находится в первом квадранте, то (независимо от направления его вращения) для управления двигателем используют сигнал функции sin AQt, если же этот вектор находится в других квадрантах, то для управления используется сигнал постоянной величины. В результате указанных операций формируется сигнал управления: где
AU yUmsln AQt + SUm, у 1 при О AQ t лг/2, при л/2 AQ t 2тг, 5 0 при 0 AQ t л/2, 5 1 при л/2 I AQ t I 2л; AQ О,
S -1 при л/2 I AQ t , AQ 0.
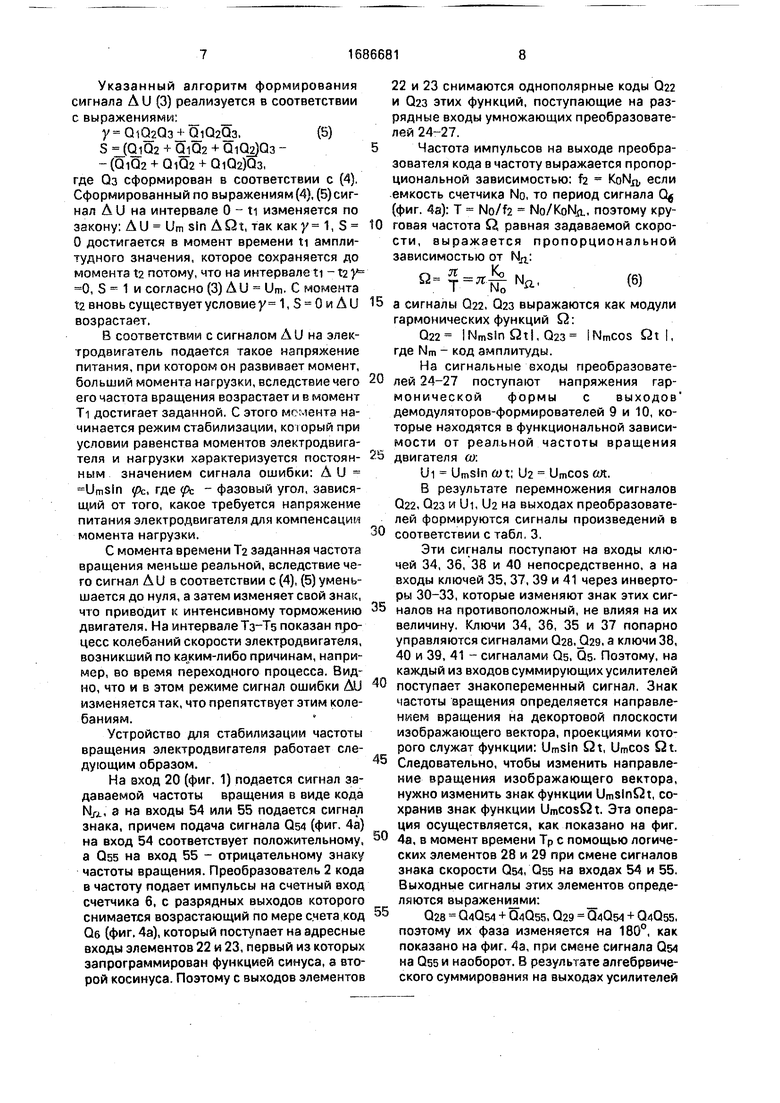
Сигнал A U воздействует на напряжение питания электродвигателя так, чтобы уменьшить разность частот вращения до нуля. При этом возможны три режима: Q а) (), (),Q ш (), которые отображены на фиг. 3:
на отрезках времени 0-ц, , ts °° заданная частота вращения больше реальной A Q 0, которая может быть в частном случае равной нулю: электродвигатель при этом разгоняется;
на отрезке времени ti t ta частоты вращения равны, а электродвигатель работает в режиме стабилизации частоты вращения;
на отрезке времени 1.2-1.3, fcj-ts заданная частота вращения меньше реальной и двигатель тормозится.
На участке О-ц сигналы AUi и AU2 в соответствии с (2) изменяются по законам; AUi Umsin A Q t, AU2 - Umcos AQt, вследствие чего изображающий вектор вращается против часовой стрелки. Сформули- рованное выше правило знаков для определения направления вращения этого вектора технически реализуется так: формируются меандры QI и Q2, соответствующие положительным полуволнам AUi иАШ, и формируется сигнал Оз по следующему правилу: ,
Q3 6iQ2, Q3 QiQ2, (4) где QI и Cfi символизируют соответственно положительный и отрицательный перепады сигнала СИ. Из (4) следует, что Оз 1 при совпадении переднего, а Оз 0 при совпадении заднего фронта импульса сигнала СП с импульсов сигнала Cte, что и показано на фиг. 3.
Указанный алгоритм формирования сигнала A U (3) реализуется в соответствии
с выражениями:
y QiQ2Q3 QjQ2Q3,(5)
S 3(QiQ2 + QiQ2 + QiQgjQa - - (Qid2 + QiQ2 + QiQ2)Q3, где Оз сформирован в соответствии с (4), Сформированный по выражениям (4), (5) сигнал A U на интервале 0 - ц изменяется по закону: AU Um sin AQt, так каку 1,3 О достигается в момент времени ti амплитудного значения, которое сохраняется до момента t2 потому, что на интервале ti -12 у 0, S 1 и согласно (3) Аи Um. С момента t2 вновь существует условие у 1, S 0 и Аи возрастает.
В соответствии с сигналом А К на электродвигатель подается такое напряжение питания, при котором он развивает момент, больший момента нагрузки, вследствие чего его частота вращения возрастает и в момент Ti достигает заданной. С этого момента начинается режим стабилизации, котрый при условии равенства моментов электродвигателя и нагрузки характеризуется постоянным значением сигнала ошибки: A U UmSln рс, где - фазовый угол, зависящий от того, какое требуется напряжение питания электродвигателя для компенсации момента нагрузки.
С момента времени Т2 заданная частота вращения меньше реальной, вследствие чего сигнал AU в соответствии с (4), (5) уменьшается до нуля, а затем изменяет свой знак, что приводит к интенсивному торможению двигателя. На интервале Тз-Ts показан процесс колебаний скорости электродвигателя, возникший по ка ким-либо причинам, например, во время переходного процесса. Видно, что и в этом режиме сигнал ошибки AU изменяется так, что препятствует этим колебаниям.
Устройство для стабилизации частоты вращения электродвигателя работает следующим образом.
На вход 20 (фиг. 1) подается сигнал задаваемой частоты вращения в виде кода NO., а на входы 54 или 55 подается сигнал знака, причем подача сигнала 054 (фиг. 4а) на вход 54 соответствует положительному, a Qss на вход 55 - отрицательному знаку частоты вращения. Преобразователь 2 кода в частоту подает импульсы на счетный вход счетчика 6, с разрядных выходов которого снимается возрастающий по мере смета код Qe (фиг. 4а), который поступает на адресные входы элементов 22 и 23, первый из которых запрограммирован функцией синуса, а второй косинуса. Поэтому с выходов элементов
22 и 23 снимаются однополярные коды Q22 и Q23 этих функций, поступающие на разрядные входы умножающих преобразователей 24-27.
Частота импульсов на выходе преобразователя кода в частоту выражается пропорциональной зависимостью: h КоМд, если емкость счетчика No, то период сигнала 0$ (фиг. 4а): Т No/f2 Мо/КоМд., поэтому круговая частота Ц равная задаваемой скорости, выражается пропорциональной зависимостью от Ыл:
(6)
а сигналы Q22, Q23 выражаются как модули гармонических функций Q:
Q22 iNmSinQtl, 023 I NmCOS Qt|,
где Mm - код амплитуды.
На сигнальные входы преобразователей 24-27 поступают напряжения гармонической формы с выходов1 демодуляторов-формирователей 9 и 10, которые находятся в функциональной зависимости от реальной частоты вращения
двигателя со:
U1 UmSln U2 UmCOS OK.
В результате перемножения сигналов 022, 023 и Ui, U2 на выходах преобразователей формируются сигналы произведений в
соответствии с табл. 3.
Эти сигналы поступают на входы ключей 34, 36, 38 и 40 непосредственно, а на входы ключей 35, 37, 39 и 41 через инверторы 30-33, которые изменяют знак этих сигналов на противоположный, не влияя на их величину. Ключи 34, 36, 35 и 37 попарно управляются сигналами 028, Q29, а ключи 38, 40 и 39, 41 - сигналами Qs, Об. Поэтому, на каждый из входов суммирующих усилителей
поступает знакопеременный сигнал. Знак частоты вращения определяется направлением вращения на декортовой плоскости изображающего вектора, проекциями которого служат функции: Umsln Ј2t, Umcos Qt.
Следовательно, чтобы изменить направление вращения изображающего вектора, нужно изменить знак функции UmslnQt, сохранив знак функции UmcosQt. Эта операция осуществляется, как показано на фиг.
4а, в момент времени Тр с помощью логических элементов 28 и 29 при смене сигналов знака скорости Qs4, Qss на входах 54 и 55. Выходные сигналы этих элементов определяются выражениями:
028 Q4Q54 + QV)55, 029 04054+ 04055,
поэтому их фаза изменяется на 180°, как показано на фиг. 4а, при смене сигнала Q54 на QSS и наоборот. В результате алгебраического суммирования на выходах усилителей
42 и 43 формируются сигналы, фаза которых зависит от задаваемого знака частоты вращения Ј2и знака реальной частоты вращения а), что необходимо для правильного задания режима питания электродвигателя (табл. 4).
Из табл. 4 видно, что функция sin (Q- -w) t полностью соответствует интегральному знаку формирования сигнала ошибки по частоте вращения при О (Q- ai)i n /2, т.е. при расположении изображающего вектора в первом квадранте. В других же квадрантах должен быть сформирован сигнал насыщения. Эта операция осуществляется с помощью блока 44 определения квадранта расположения изображающего вектора сигнала ошибки, проекциями которого на декартовой плоскости являются функции sin (Q - u) t, cos (Q - и) t. С выходов формирователей 45 и 46 снимаются импульсы прямоугольной формы Q45, Q46 (фиг. 46), которые подаются на соответствующие входы фазового дискриминатора 48 (фиг. 2), инвертора 47 и логического элемента 49. С помощью RC-цепи и элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 57 формируются короткие импульсы Qs (фиг. 46), которые на выходах схем 59 и 63 (фиг. 2) распределяются по различным каналам: Qsg и Оез на фиг. 46. Схемы 60 и 64 формируют сигналы в соответствии с выражениями: Qeo QteQsg, Об4 СМбОез, а триггер 65 и 66 устанавливается в соответствующее положение. Таким образом, реализуется операция, выраженная формулами (4). На фиг. 46 показаны те же режимы работы устройства, что и на фиг. 3, поэтому сигнал Q48 на фиг, 46 соответствует сигналу Qss на фиг. 3. Логический элемент 49 формирует сигнал Q49 по закону:
Q49 Q45Q48Q46 - Q45Q46Q48,
что соответствует первому равенству выражений (5). Этот сигнал поступает на управляющий вход конечного коммутатора 52. Коммутатор 53 реализует функцию ОБЗ Q48Q50-Q48Qsi, где знак минус характеризует полярность источника 50, 51 нагряже- ния. Сигнал Обз поступает на сигнальный вход конечного коммутатора 52, который пропускает на выход либо сигнал Umsin (Q- -ftjjt, при Q49 0, либо опорный сигнал от источников 50, 51 в соответствии с вторым уравнением (5). В результате этих операций на выходе коммутатора 52 формируется сигнал ошибки по частоте вращения Ли в соответствии с (3), который поступает через регулятор 11 на входы перемножителей 14, 15 сигналов. Так как на вторые входы этих звеньев поступают сигналы с выходов демодуляторов-формирователей 9, 10, то на их
выходах формируются сигналы: Qi4 А Usin ст., Qis AUcos сгл, которые сравниваются на входах широтно-импульсных регуляторов 16, 17 с сигналами датчиков 18 и 5 19 тока. Так как коэффициент усиления широтно-импульсных регуляторов велик,то ток в фазах двигателя повторяет форму сигналов Qi4, Qi5, что и требуется для работы вентильного электродвигателя. 0 В соответствии с табл. 4 в режиме 1 сигнал ошибки по частоте вращения имеет положительный знак, вследствие чего электродвигатель создает момент и развивает частоту вращения положительного знака. В
5 режиме 2 сигнал ошибки изменяет свой знак: в соответствии с этим электродвигатель развивает момент и частоту вращения противоположного направления. В режимах 1 и 2 электродвигатель работает в режи0 ме разгона, вследствие чего его частота вращения увеличивается до тех пор, пока не наступит равенство: Q со.
Режим 3 соответствует противовключе- нию электродвигателя: сигнал ошибки, а
5 следовательно, момент положительны, а частота вращения отрицательна. Следовательно, под воздействием момента электродвигатель тормозится до нуля, а затем переходит в режим 1. В режиме 4 дви0 гатель работает аналогично. Из формул табл. 4 видно, что сигнал ошибки во времени нарастает (в первом квадранте), при (Q- - ш) const, что соответствует интегральному (астатическому) закону регулирования.
5 Регулятор 11 обеспечивает устойчивость. Таким образом, устройство в целом представляет собой ПИД-регулятор, который обеспечивает в статическом режиме отсутствие ошибки стабилизации по частоте вра0 щения.
Из фиг, 3 видно, чти при значительных рассогласованиях по частоте вращения сигнал ошибки Л U достигает максимального значения, которое сохраняется до конца
5 оборота вала двигателя, При этом двигатель работает при максимальном напряжении питания и форсированно разгоняется или тормозится, что и обеспечивает повышенное по сравнению с прототипом быстродей0 ствие. Переключения элементов устройства не влияет на сигнал ошибки Аи вследствие чего, отсутствуют пульсации этого сигнала и частоты вращения в сравнении с известным устройством.
5 Указанное улучшение характеристик приводит к уменьшению на 20-30% потребления электроэнергии автономного источника питания системой управления подвижным объектом.
Формула изобретения Устройство для стабилизации частоты вращения электродвигателя, содержащее блок циклического интегрирования, выполненный с преобразователем код - частота, инвертором, двумя триггерами и счетчиком, датчик углового положения, предназначенный для установки на валу электродвигателя и подключенный каждым из выходов к входу соответствующего демодулятора-формирователя, пропорционально-интегрально- дифференциальный регулятор и два регулятора тока, каждый из которых выполнен с перемножителем сигналов, широтно- импульсным регулятором напряжения и датчиком тока, предназначенным для установки в соответствующую фазу электродвигателя, при этом вход счетчика подключен к выходу преобразователя код-частота, вход которого образует вход задания величины частоты вращения, выход старшего разряда счетчика подключен к входу первого триггера непосредственно, а к входу вто юго триггера - через инвертор, один из входов широтно-импульсного регулятора напряжения подключен к выходу соответствующего датчика тока, другой вход - к выходу соответствующего перемножителя сигналов, первые входы перемножителей сигналов в регуляторах тока объединены и подключены к выходу пропорционально-интегрально- дифференциального регулятора, а вторые входы соединены с выходами соответствующих демодуляторов-формирователей, о т- личающееся тем, что, с целью повышения точности и быстродействия, введены формирователь гармонических сигналов ошибки стабилизации частоты вращения, снабженный двумя программируемыми запоминающими элементами, четырьмя циф- роаналоговыми преобразователями, двумя логическими элементами 2-2И-ИЛИ, четырьмя инверторами, четырьмя парами ключей и двумя сумматорами, и блок определения квадранта положения изображающего вектора сигнала ошибки, снабженный двумя формирователями импульсов, инвертором, фазовым дискриминатором, логическим элементом 2-ЗИ-ИЛИ, двумя источниками опорных напряжений и двумя коммутаторами, каждый из которых выполнен с тремя входами, при этом входы программных запоминающих элементов подключены к выходу счетчика, а выходы соединены с попарно объединенными разрядными входами соответствующих цифро- аналоговых преобразователей, попарно
объединенные сигнальные входы соответствующих цифроаналоговых преобразователей подключены к выходам соответствующих демодуляторов-формирователей, выходы каждого из цифроаналоговых преобразователей соединены непосредственно с сигнальным входом одного из ключей соответствующей пары ключей и с сигнальным входом другого ключа
0 через соответствующий инвертор формирователя гармонических сигналов, управляющие входы ключей первой и второй пар ключей попарно объединены и подключены к выходам соответствующих логических эле5 ментов 2-2И-ИЛИ, управляющие входы ключей третьей и четвертой пар ключей попарно объединены между собой и подключены к выходам второго триггера в блоке циклического интегирования, одни из вхо0 дов логических элементов 2-2И-ИЛИ подключены к соответствующим выходам первого триггера, а другие образуют два входа задания знака частоты вращения, объединенные между собой попарно выхо5 ды первой и третьей пар ключей подключены к входам первого сумматора, объединенные между собой попарно выходы второй и четвертой пар ключей подключены к входам второго сумматора, выход
0 первого сумматора подключен к первому входу первого коммутатора и входу первого формирователя импульсов, выход второго сумматора подключен к входу второго формирователя импульсов, выходы формирова5 телей импульсов соединены с соответствующими входами фазового дискриминатора, подключенного прямым выходом к соответствующему входу первой половины логического элемента 2-ЗИ-ИЛИ
0 и к первому входу второго коммутатора, а инверсным выходом - к соответствующему входу второй половины логического элемента 2-ЗИ-ИЛИ, выход первого формирователя импульсов подключен непосредственно к
5 соответствующему входу первой половины логического элемента 2-ЗИ-ИЛИ, а через инвертор блока определения квадрант к соответствующему входу второй половины логического элемента 2-ЗИ-ИЛИ, выход ко0 торого и выход второго коммутатора подключены соответственно к второму и третьему входам первого коммутатора, соединенного выходом с входом пропорционально-интегрально-дифференциального
5 регулятора, а другие два входа коммутатора соединены с разнополярными полюсами источников опорных напряжений.
Таблица
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1989 |
|
SU1646035A2 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Цифровая фотокопировальная следящая система | 1986 |
|
SU1478191A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Вычислительное устройство для управления лучом фазированной антенной решетки | 1991 |
|
SU1829041A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Устройство для преобразования сигналов | 1984 |
|
SU1234991A1 |
Изобретение относится к электротехнике, а именно к автоматизированному электроприводу, и может быть использовано в системах управления подвижных объектов. Целью изобретения является повышение точности стабилизации частоты вращения и быстродействия. Для этого в устройство введены формирователь гармонических сигналов ошибки стабилизации частоты вращения и блок определения квадранта положения изображающего вектора сигнала ошибки. Изобретение обеспечивает циклическое интегрирование величины задаваемой частоты вращения, преобразование полученного сигнала и угла поворота вала в гармонические функции, анализ положения изображающего вектора сигнала ошибки и соответствующее формирование управляющих напряжений для электродвигателя. При этом отсутствует ошибка стабилизации частоты вращения и повышается быстродействие. 4 ил., 4 табл. Ё
Режим
, о О , uKO , ,
042 sin Qt cosa) t - cosQt sintw t sin (Q- со) t Q43 cos Qt cosa)t + sinQt slnwt cos (Q- (a) t Q42 - sin Qt cosuJt + cosQt sinft)t -sin (Q- a) t Q43 cosQtcosft t + cosQt slnft t cos ()t Q42 sin Qt cosa) t + cosQt sincy t sin (Q- G) t Q43 cos Qt COSUM- sinQt slnft)t cos (Q-(u)t Q42 -sin Qt - cosQt sincot - sin ()t Q43 cos Qtcosctft- sinQt slno;t cos (Q-uJ)t
550
Таблица 3
Таблица 4
Сигнал
8
и
Фиг 4
| Авторское свидетельство СССР № 1163454, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для регулирования частоты вращения электродвигателя | 1980 |
|
SU909779A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
