Изобретение относится к измерительной технике и может быть использовано для измерения параметров магнитного поля космического пространства со спутников Земли и для определения местоположения намагниченных тел и магнитных аномалий по измеренным параметрам магнитного поля с подвижной платформы, например самолета или подводного автоматического аппарата.
Цель изобретения - повышение точности измерения проекций вектора магнитной индукции с подвижной платформы.
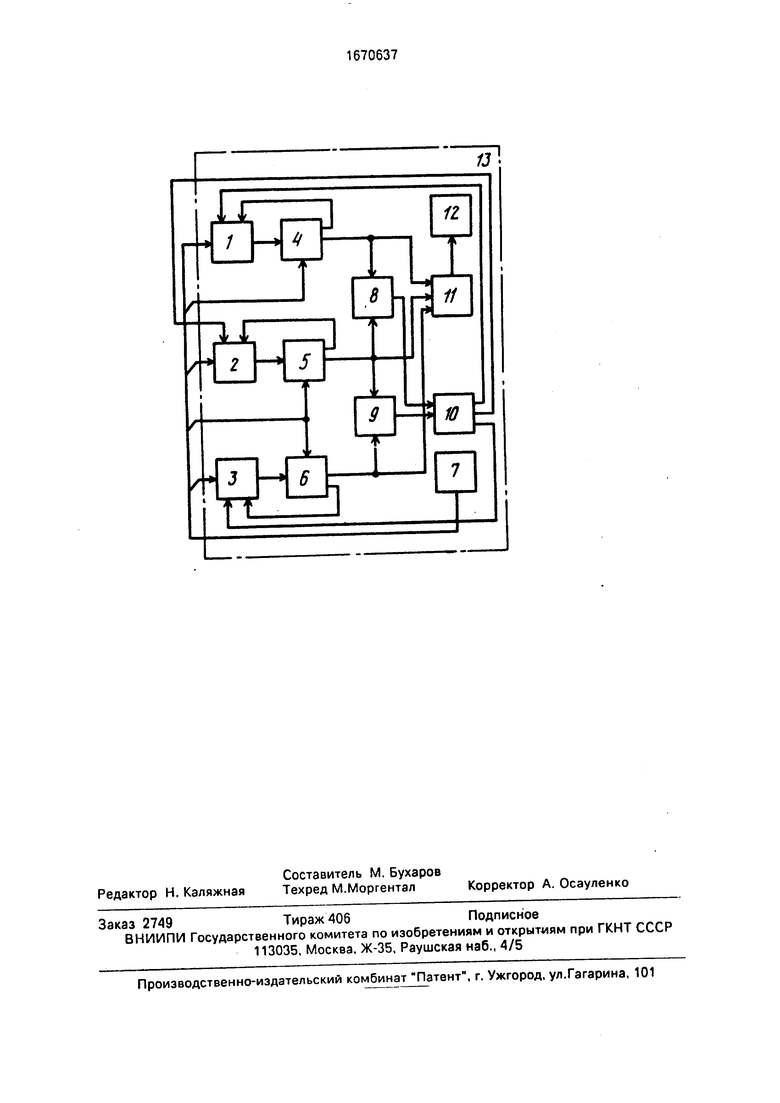
На чертеже изображена структурная схема устройства.
Устройство состоит из трех трехкомпо- нентных магниточувствительных, например, феррозондовых преобразователей 1-3, трех усилителей-преобразователей 4-6, генератора переменной ЭДС 7, двух блоков вычитания 8 и 9, вычислительного блока 10, масштабного усилителя 11, регистрирующего прибора 12 и подвижной платформы 13, на которой размещены все блоки. Первые входы усилителей-преобразователей 4-6 подключены к выходам преобразователей 1-3, а первые выходы усилителей преобраО vj
О О CJ
VJ
зователей 4-6 подключены к первым входам преобразователей 1-3 соответственно. Выходы генератора 7 подключены ко вторым входам преобразователей 1-3 и вторым входам усилителей-преобразователей 4-6, вторые выходы усилителей-преобразователей 4 и 5 подключены ко входам блока 8 вычитания и к первым двум входам масштабного усилителя 11, вторые выходы усилителей-преобразователей 5 и 6 подключены к блоку 9 вычитания, второй выход усилителя-преобразователя 6 подключены к третьему входу масштабного усилителя 11, выходы блоков 8, 9 вычитания подключены ко входам вычислительного блока 10, выходы которого подключены к третьим входам преобразователей 1-3 соответственно, выход масштабного усилителя 11 подключен к регистрирующему прибору 12.
Устройство работает следующим образом.
На вторые входы преобразователей 1-3 подается с генератора 7 переменная ЭДС, возбуждающая эти преобразователи. В результате этого на выходе каждого из преобразователей 1-3 появляются три ЭДС второй гармоники, каждая из которых пропорциональна одной из трех проекций результирующего вектора магнитной индукции, созданной магнитным полем помехи подвижной платформы и магнитным полем космического пространства или однородным геомагнитным полем и полем магнитной аномалии. Выходные сигналы с преобразователей 1-3 усиливаются и детектируются в соответствующих блоках 4-6, а затем подаются на первые входы преобразователей 1-3, что обеспечивает отрицательную обратную связь по измеряемым проекциям векторов магнитной индукции, При этом каждый из усилителей-преобразователей 4-6 состоит из трех избирательных усилителей, трех синхронных детекторов и трех интеграторов, поэтому выходные сигналы с каждого усилителя-преобразователя 4-6 пропорциональны трем проекциям результирующего вектора магнитной индукции. Эти сигналы поступают на масштабный усилитель 11 и соответствующие блоки 8, 9 вычитания. Выходной сигнал с блока 8 пропорционален разности векторов магнитной индукции, измеренной преобразователями 1 и 2, а выходной сигнал с блока 9 пропорционален разности векторов магнитной индукции, измеренной преобразователями 2 и 3. На подвижной платформе 13 расстояние между тремя магниточувствительными преобразователями 1-3 значительно меньше, чем расстояние от каждого из этих преобразователей 1-3 до магнитной аномалии или
намагниченного тела, значения проекций векторов магнитной индукции которых следует измерить, например, для определения их местоположения. Поэтому магнитное поле, созданное магнитной аномалией или намагниченным телом, или магнитным полем космического пространства в трех точках расположения преобразователей 1-3 на борту платформы (например, на выносной
0 немагнитной штанге спутника Земли) будет однородным. Значит выходные сигналы с блоков 8 и 9 будут пропорциональными разностям проекций векторов магнитной индукции помехи, созданной подвижной
5 платформой для трех точек пространства, в которых расположены преобразователи 1- 3. Выходные сигналы с блоков 8 и 9 поступают на вычислительный блок 10, в который входит, например, электронно-вычисли0 тельная машина (ЭВМ). В блоке 10 осуществляется определение координат и магнитного момена эквивалентного диполь- ного источника поля подвижной платформы, по которым блок 10 определяют
5 значение проекций векторов магнитной индукции, созданной подвижной платформой в местах расположения преобразователей 1-3.
С блока 10 сигналы,пропорциональные
0 значениям проекций векторов магнитной индукции подвижной платформы противоположной полярности, поступают на каждый из преобразователей 1-3, осуществляя автоматическую компенсацию магнитной
5 индукции подвижной платформы в объеме каждого из этих преобразователей, что увеличивает отношение полезного сигнала намагниченного объекта или магнитной аномалии к магнитной помехе, созданной
0 подвижной платформой,
Выходные сигналы с усилителей-преобразователей 4-6 , пропорциональные проекциям векторов магнитной индукции внешнего источника поля (рудных тел, на5 магниченного объекта, магнитного поля космического пространства и т.д.) поступают на масштабный усилитель. Выходной сигнал с усилителя 11 пропорционален среднему арифметическому значению результатов из0 мерений проекций векторов магнитной индукции внешнего поля тремя преобразователями 1-3.
Выходной сигнал с усилителя 11 подается на регистрирующий прибор 12.
5В тех случаях, когда имеются хотя бы
ориентировочные сведения (по результатам моделирования или эксперимента) с намагниченности подвижной платформы, а, значит, и сведения о возможных местоположениях дипольного источника
этой платформы, то три точки пространства можно выбрать в вершинах треугольника непосредственно на корпусе подвижной платформы так, чтобы любая точка поверхности возможного местоположения диполь- ного источника поля подвижной платформы находилась вне плоскости, проходящей через три выбранные точки пространства. В случае, когда нет никаких дополнительных сведений о намагниченности подвижной платформы, а, значит,-и возможных местоположений дипольного источника поля этой платформы, следует выбирать упомянутые точки пространства на выносной немагнитной штанге, например, искусственного спутника Земли в вершинах треугольника так, чтобы любая точка подвижной платформы находилась вне плоскости, проходящей через три выбранные точки пространства. При несоблюдении этих требований возможны случаи, когда дипольный источник магнитов поля подвижной платформы либо равноудален от каждой из трех выбранных точек пространства, либо векторы магнитной индукции в каждой из трех точек пространства коллинеарны, что приведет к неустойчивости или неоднозначности определения магнитного поля компенсации в выбранных точках пространства.
Формула изобретения 1. Способ измерения проекций вектора магнитной индукции с подвижной платформы, основанный на измерении проекции векторов магнитной индукции в трех точках пространства, выбранных на этой платформе, отличающийся тем, что, с целью повышения точности измеряют разности проекций векторов магнитной индукции для этих точек пространства, по разностям измерений, по измеренным проекциям векторов магнитной индукции в трех точках пространства определяют проекции вектора магнитной индукции удаленного источника, как среднее арифметическое результатов измерений этих проекций, при этом упомянутые точки пространства выбирают в вершинах треугольника, центр описанной
окружности которого расположен за его пределами, а любая точка поверхности, охватывающая пространство возможного местоположения дипольного источника поля подвижной платформы, расположена вне
плоскости, проходящей через три выбранные точки пространства.
2. Устройство для измерения проекций вектора магнитной индукции с подвижной платформы, содержащее три трехкомпонентных магниточувствительных преобразователя, подключенные к ним соответственно три усилительно-преобразовательных блока, генератор переменной ЭДС, вычислительный блок, выходы которого подключены
к первым входам магниточувствительных преобразователей, вторые входы которых соединены с первыми выходами соответствующих усилительно-преобразовательных блоков, от л ичающееся тем. что, с целью
повышения точности, оно снабжено масштабным усилителем и двумя блоками вычитания, первые входы которых соединены со вторым выходом второго усилительно-преобразовательного блока и с первым входом
масштабного усилителя, второй вход которого подключен ко второму выходу первого усилительно-преобразовательного блока и ко второму входу первого блока вычитания, второй вход второго блока вычитания соединен со вторым выходом третьего усилительно-преобразовательного блока и с третьим входом масштабного усилителя, соединенного с регистрирующим прибором, выходы блоков вычитания подключены ко входам
вычислительного блока, вторые входы усилительно-преобразовательных блоков и третьи входы магниточувствительных преобразователей подключены к генератору переменной ЭДС.

Изобретение относится к измерительной технике и может быть использовано для измерения параметров магнитного поля космического пространства со спутников Земли и для определения местоположения намагниченных тел и магнитных аномалий по измеренным параметрам магнитного поля с подвижной платформы. Цель изобретения - повышение точности измерения проекций вектора магнитной индукции с подвижной платформы. Измеряют разности проекций векторов магнитной индукции для трех точек пространства, определяют проекции вектора магнитной индукции удаленного источника как среднее арифметическое результатов измерений этих проекций, при этом упомянутые точки пространства выбирают в вершинах треугольника, центр описанной окружности которого расположен за его пределами, а любая точка поверхности расположена вне плоскости, проходящей через три выбранные точки пространства. Устройство, реализующее данный способ, содержит феррозондовые преобразователи 1 - 3, усилители-преобразователи 4 - 6, генератор переменной ЭДС 7, блоки 8, 9 вычитания, вычислительный блок 10, масштабный усилитель 11, регистрирующий прибор 12 и подвижную платформу 13. 2 с.п.ф-лы, 1 ил.
| Способ определения магнитного момента дипольного источника поля и координат точки приложения этого момента | 1982 |
|
SU1064251A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
