Изобретение относится к обработке металлов давлением и может быть использовано в кузнечно-прессовом машиностроении.
Цель изобретения - расширение функциональных возможностей за счет исполь зования в прессах как с. ходом нижней балки, так и с ходом верхней балки; за счет применения без переналадки при различной геометрии гибочного инструмента и толщина заготовки; за счет обеспечения поддержки заготовки при изгибе заготовки под углом к кромке и при изгибе заготовки со всех сторон; за счет повьшенкя массы заготовки при определенных раз мерак устройства.
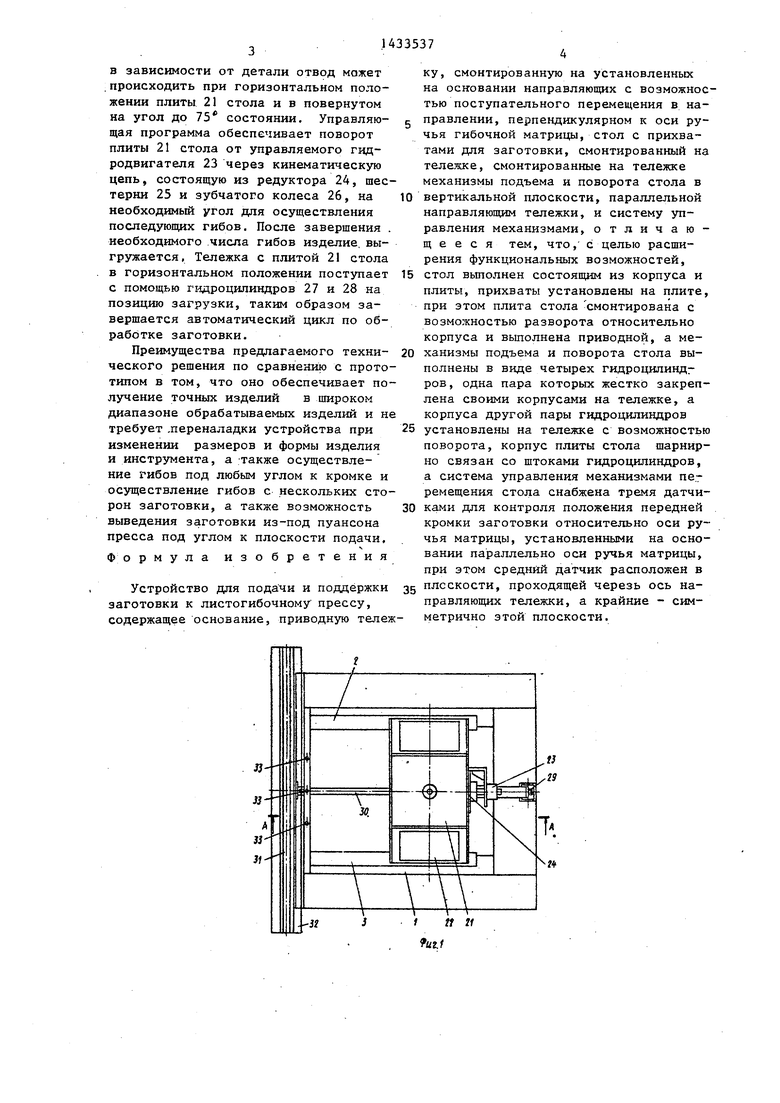
На фиг. 1 изображено предлагаемое устройство, в-ид в плане; на фиг, 2 - разрез А-А на фиг. ; на фиг. 3 - ра рез Б-Б на фиг, 2; на фиг. 4 - разрез В-В на фиг,2; на фиг, 5 - разрез Г-Г на фиг,2; на фиг. 6 - разрез Д-Д ка фиг.-2; на фиг. 7 - узел I на фиг.З,
Устройство содержит основание 1 с направляющими 2 и 3 Направляющие. охватываются роликовыми опорами 4 и 5j расположеннь мк ка тележке 6 На; т лежке расположены две пары цилиндров 7 и 8 Цилиндры 7 закреплены на тележке с помощью полуколец 9. Цилиндры 8 установлены с помощь полуколец с цапфами ГО, вращающимися в подшипниках 1 I , расположенных в корпусах 1 закрепленных на тележке.
На штоках цилиндров с возможностью качения на осях 3 установлен корпус 14 стола 5 в котором с помощью крышек 15 и 16 и подшипников 7 и 18 с возможностью вращения установлен шлицевой вал 19, на котором закреплена с помощью гайки 20 плита 21 стола с магнитными прихватами 22. На корпусе стола установлен гидродвигатель 235 редуктор 24 с шестерней 25, аходящей в зацепление с зубчатым колесом 26, закрепленным на плите 21 стола. Тележка помещается с помощью двух плунжерным цилиндров 27 и 28, штоки 29 к 30 которых связаны с основанием, а цилиндры - с тележкой. На одинаковом расстоянии от оси матрицы 31, установленной на столе 32 пресса в плоскости подачи, расположены три датчика 33. Причем датчики расположены в ряду с равным шагом, а средний - на оси подачи параллельной направляющим гелеуккк .
o
5
5
5
0
5
0
5
Устройство работает следующим образом .
В исходном положении тележка находится в крайнем положении от листогибочного пресса на оси загрузки, f Шток 30 цилиндра 28 выдвинут, а щток 29 цилиндра 27 втянут. Штоки цилиндров 7 и 8 находятся в крайнем нижнем положении. Верхня плоскость магнитных прихватов 22 совпадает с верхней плоскостью матрицы 3. Заготовка с помощью загрузочных средств устанавливается на плиту 21 стола, располагаясь обрабатываемой кромкой вдоль оси ручья матрии ы.
Устройство программного управле- . . ния, управляющее работой пресса и устройства, снабжено управляющей программой с известными параметрами инструмента и заготовки. Устройство готово к работе, Подается команда на разгрузку заготовки в листогибочньй пресс, Срабатывают магнитные прихваты 22 и фиксируют заготовку относительно плиты 21 стола. После срабатывания прихватов цилиндры 27 и 28 перемещают тележку 6 в направлении листогибочного пресса, При движении тележки с заготовкой срабатывает один из крайних датчиков 33, который дает сигнал на отсчет пути прохождения тележки до срабатьшания центрального датчика 33, таким образом получена полная информация, обеспечивающая управление разворотом плиты 21 стола до срабатывания всех трех датчиков 33, т.е. установки заготовки параллельно оси ручья матрицы на известном расстоянии. Управляющее устройство дает команду на перемещение тележки дпя подачи заготовки под пуансон листогибочного пресса.
Управляемые гидроцилиндры 27 и 28 отрабатывают перемещение и дают, сигнал на ход пуансона вниз. При достижении заготовки выдается сигнал на следяющее перемещение заготовки в зависимости от рабочего хода пуансона. Управляющая программа обеспечивает перемещение тележки 6 с помощью управляемых гидроцилиндров 27 и 28, а также подъем и наклон корпуса 14 стола и, связанной с ним плиты 21 стола с помощью управляемых гидроци- яиндров 7 и 8.
После завершения гиба управляющая программа обеспечивает управление отводом заготовки из зоны гиба, причем
в зависимости от детали отвод мажет происходить при горизонтальном положении плиты 21 стола и в повернутом на угол до 75 состоянии. Управляю- щая программа обеспечивает поворот плиты 21 стола от управляемого гидродвигателя 23 через кинематическую цепь, состоящую из редуктора 24, шестерни 25 и зубчатого колеса 26, на необходимый угол для осуществления последующих гибов. После завершения . необходимого числа гибов изделие, выгружается, Тележка с плитой 21 стола в горизонтальном положении поступает с помощью гидроцилиндров 27 и 28 на позицию загрузки, таким образом завершается автоматический цикл по обработке заготовки.
Преимущества предлагаемого техни- ческого решения по сравнению с прототипом в том, что оно обеспечивает получение точных изделий в широком диапазоне обрабатываемых изделий и не требует .переналадки устройства при изменении размеров и формы изделия и инструмента, а также осуществле- ние гибов под любым углом к кромке и осуществление гибов с нескольких сторон заготовки, а также возможность выведения заготовки из-под пуансона пресса под углом к плоскости подачи,
N
Формула изобретения
ку, смонтированную на установленных на основании направляющих с возможностью поступательного перемещения в направлении, перпендикулярном к оси ручья гибочной матрицы, стол с прихватами для заготовки, смонтированный на тележке, смонтированные на тележке механизмы подъема и поворота стола в вертикальной плоскости, параллельной направляющим тележки, и систему управления механизмами, отличающееся тем, что, с целью расширения функциональных возможностей, стол вьтолнен состояшдм из корпуса и плиты, прихваты установлены на плите, при этом плита стола смонтирована с возможностью разворота относительно корпуса и вьшолнена приводной, а механизмы подъема и поворота стола выполнены в виде четырех гидроцилиндг ров, одна пара которых жестко закреплена своими корпусами на тележке, а корпуса другой пары гидроцилиндров установлены на тележке с возможностью поворота, корпус плиты стола шарнир- но связан со штоками гидроцилиндров, а система управления механизмами пе.- ремещения стола снабжена тремя датчиками для контроля положения передней кромки заготовки относительно оси ручья матрицы, установленными на основании параллельно оси ручья матрицы, при этом средний датчик расположен в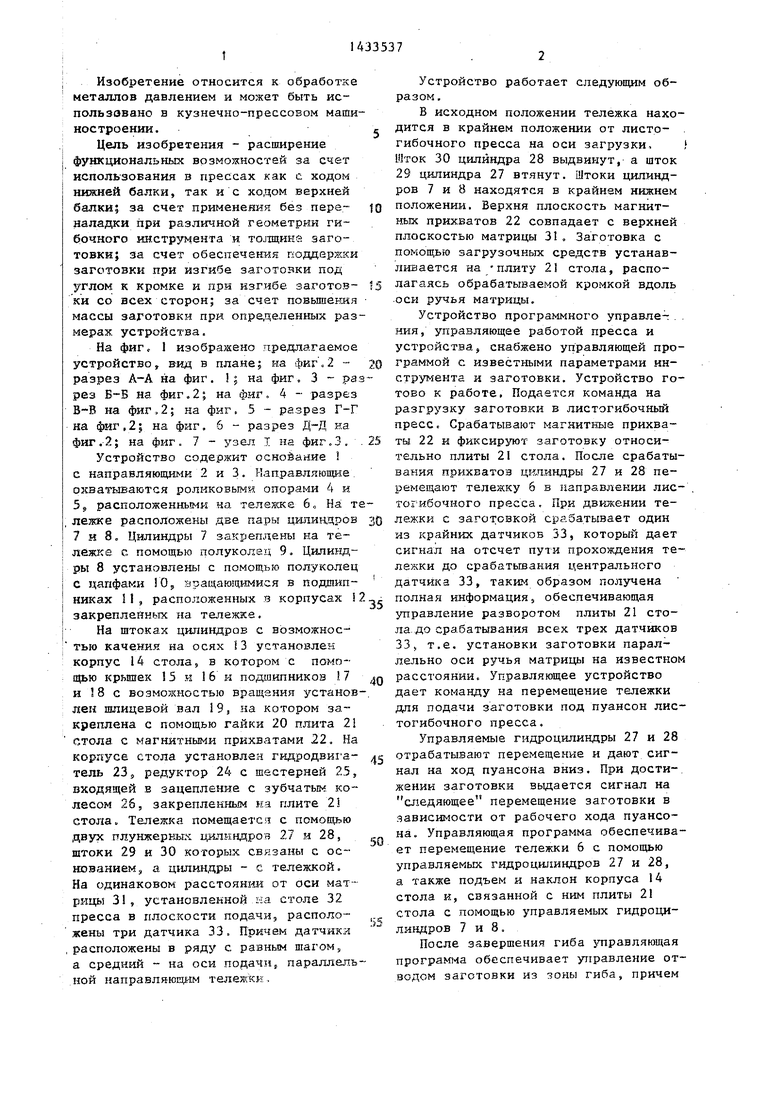
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИСТОГИБОЧНЫЙ ГИДРАВЛИЧЕСКИЙ ПРЕСС РАМНОГО ТИПА | 2003 |
|
RU2247029C1 |
| Способ гибки заготовок и устройство для его осуществления | 1988 |
|
SU1806031A3 |
| Станок для соединения витков двухплоскостных спиралей скобами | 1988 |
|
SU1549644A1 |
| ЛИСТОГИБОЧНЫЙ ПРЕСС | 2007 |
|
RU2349404C2 |
| ЛИСТОГИБОЧНЫЙ ПРЕСС | 1993 |
|
RU2087316C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ СИЛЬФОНОВ | 1990 |
|
RU2019339C1 |
| Способ поперечной гибки профилированного или продольно-гофрированного листового металла и устройство для его осуществления | 1981 |
|
SU1207390A3 |
| ГИДРАВЛИЧЕСКИЙ ЛИСТОГИБОЧНЫЙ ПРЕСС | 2000 |
|
RU2192964C2 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС ДЛЯ ФОРМООБРАЗОВАНИЯ КРУТОИЗОГНУТЫХ ПАТРУБКОВ | 1998 |
|
RU2172221C2 |
| Линия для подгибки кромок листов с двух сторон | 1989 |
|
SU1748902A1 |

Изобретение относится к обработке металлов давлением и может быть использовано в кузнечно-нрессовом машиностроении. Цель - расширение функциональных возможностей. Устройство содержит плиту 21 стола с прихватами 22 заготовки, разворачиваю- щуюся относительно оси корпуса 14 стола от управляемого гидродвигателя 23, связанного с плитой стола посредством редуктора 24 с шестерней 25 и зубчатого колеса 26. Корпус стола установлен с возможностью поворота в вертикальной плоскости на штоках цилиндров 7 и 8. Корпусы цилиндров смонтированы на тележке 6.. Цилиндр 7 закреплен жестко, а цилиндр 8 - шар- нирно. Тележка перемеща ется по направляющим 2 посредством плунжерных цилиндров 27 и 28. Их штоки 29 и 30 связаны с основанием 1, а цилиндры - с тележкой . На основании закреплены три датчика J3. При движении тележки с заготовкой срабатывает один из датчиков , подающий сигнал на отсчет пути прохождения тележки до срабатывания центрального датчика. Последний обеспечивает управление разворотом плиты стола до установки кромки заготовки под заданным углом и на определенном расстоянии от оси гибочной матрицы 31. 7 ил. й-й а 1В и // / (О (Л с 4 со со СП со Wut.t
Устройство для подачи и поддержки 35 плоскости, проходящей черезь ось направляющих тележки, а крайние - симметрично этой плоскости.
заготовки к листогибочному прессу, содержащее основание, приводную тележплоскости, проходящей черезь ось направляющих тележки, а крайние - симметрично этой плоскости.
л-ц
Фив.6
Фиг.7
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Япония | |||
| . | |||
