4
Изобретение относится к угольному машиностроению, а именно к механизмам передвижения горных машинj в частности угольных ко йайнов.
Цель изобретения т повышение эффективности и безопасности работы ; механизма передвижения горной машины домкратного типа, : На фиг.i изображен механизм пе I редвижения горной мамины домкратного типа при нулевой скорости подачи горной маишны; на фиг. 2 - то же, при движении машины влево (с гидро
результате чего отсутствует перемещение ма шны по машинной дороге 8,
При нахождении гидрораспределителя 0 реверса в позиции 1 (фиг,2) полость 30 гидроцилиндра 1 сообщается линиями 23 и 21 связи с линией 16 высокого давления; полость 31 линиями 24, 29 и 26 связи - с полостью 32 гидроциииндра 2 и с линией 17 низкого давления; полость 33 гидроцилиндра 2 линиями 25 и 22 связи - с линией 18 слива. Гидроцилиндр 1 совершает рабочий ход, вытесняя жид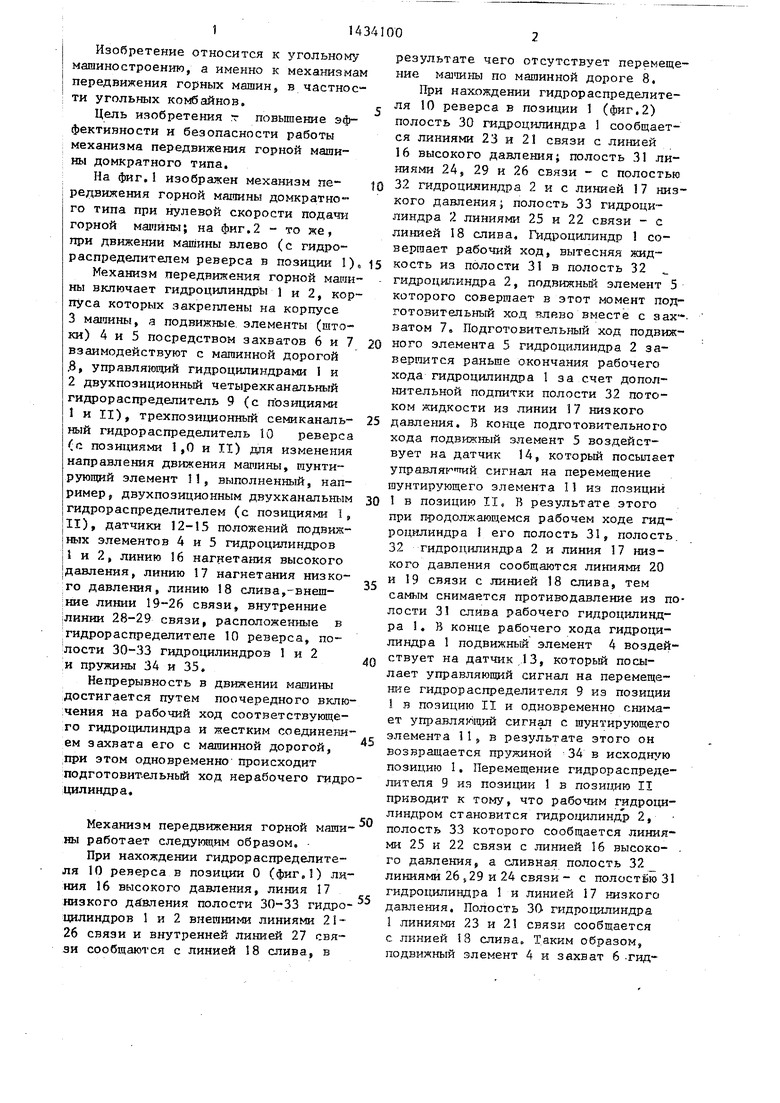
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод домкратного типа для горной машины | 1983 |
|
SU1155749A1 |
| ОЧИСТНОЙ КОМБАЙН | 2002 |
|
RU2234601C2 |
| Насосная станция механизированных крепей | 1988 |
|
SU1583624A1 |
| Устройство для автоматической защиты исполнительного органа горной машины от перегрузок | 1985 |
|
SU1301968A1 |
| Гидрообъемный привод ходовой части транспортного средства | 1985 |
|
SU1303446A1 |
| Устройство для автоматической защиты исполнительного органа горной машины от перегрузок | 1983 |
|
SU1149008A2 |
| Гидропривод рабочего органа горной машины | 1987 |
|
SU1507969A1 |
| Привод зажатия и корректировки положения свариваемых заготовок машин для контактной стыковой сварки | 1987 |
|
SU1724444A1 |
| Гидростатическая трансмиссия транспортного средства | 1986 |
|
SU1471442A1 |
| Система управления положением остова транспортного средства | 1985 |
|
SU1324872A1 |
Изобретение относится к угольному машиностроению. Цель изобретения - повышение эффективности и безопасности работы механизма передвижения горной машины домкратного типа. Механизм передвижения включает гидроцилиндры (ГЦ) 1,2, корпуса которых закреплены на корпусе 3 машины. Штоки (подвижные элементы) 4,5 посредством захватов 6,7 взаимодействуют с машинной дорогой 8. Механизм имеет гидрораспределитель (ГР) 9 управления ГЦ 1, 2, а также ГР 10 реверса машины и шунтирующий элемент II. В ГЦ 1, 2 установлены датчики 12-15 положений подвижных элементов 4,5. При нахождении ГР 10 в позиции О линия (Л) 16 высокого давления, Л 17 низкого давления, полости 30-33 ГЦ 1, 2 внешними Л 21-26 связи и внутренней Л 27 сообщаются с Л 18 слива. Перемещение машины отсутствует. Непрерывность движения машины достигается путем поочередного включения на рабочий ход соответствующего ГЦ (1,2) и жестким соединением захвата 7 с машинной дорогой. При этом происходит одновременно подготовительный ход нерабочего ГЦ (1,2). 2 ил. (Л
распределителем реверса в позиции 1)а 15 кость из полости 31 в полость 32
35
Механизм передвижения горной машины включает гидроцнпиндры 1 и 2, корпуса которых закреплены на корпусе 3 мшвдны, а подвижные элементы (штоки) 4 и 5 посредством захватов 6 и 7 20 взаимодействуют с машинной дорогой .8, управляющий гидроцилиндрами i и 2 двухпозиционный четырехканальный гидрораспределитель 9 (с п озициями 1 и II), трехпозиционный семиканапь- 25 ный гидрораспределитель 10 реверса (с позициями 1,0 и II) для изменения направления движения магганы, шунтирующий элемент 11, выполненный, например, двухпозиционным двухканальным ЗО
Iгидрораспределителем (с позициями 1, III), датчики 12-15 положений подвиж- JHHX элементов 4 и 5 гидроцилиндров
IIи 2, линию 16 нагнетания высокого
Iдавления, линию 17 нагнетания низко;го давления, линию 18 слива,-внеш;ние линии 19-26 связи, внутренние
|линии 28-29 связи, расположенные в
;гидрораспределителе 10 реверса, полости 30-33 гидроцилиндров 1 и 2 и пружины 34 и 35,
Непрерывность в движении машины достигается путем поочередного вклю;чения на рабочий ход соответствующего гидроцилиндра и жестким соединеьш- ем захвата его с машинной дорогой, при этом одновременно происходит подготовительный ход нерабочего гидро- цилиндра.
50
Механизм передвижения горной машины работает следующим образом. При нахождении гидрораспределителя 10 реверса в позиции О (фиг.) лн- ния 16 высокого давления, линия 17 низкого давления полости гидро- давления цилиндров 1 и 2 внешними линиями 21- 26 связи и внутренней линией 27 связи сообщаются с линией 18 слива, в
40
гидроципиндра 2, подвижный элемент 5 которого совершает в этот момент под готовительный ход влево вместе с зах ватом 7. Подготовительный ход подвиж ного элемента 5 гидроцилиндра 2 завершится раньше окончания рабочего хода гидроцилиндра 1 за счет дополнительной подпитки полости 32 потоком жидкости из линии 17 низкого давления. В конце подготовительного хода подвижный элемент 5 воздействует на датчик 14, который посылает управляг-тий сигнал на перемещение шунтирующего элемента 11 из позиций I в позицию II, В результате этого при продолжаюш;емся рабочем ходе гид- роцнлиндра 1 его полость 31, полость 32 гидродилиндра 2 и линия 17 низкого давления сообщаются линиями 20 и 19 связи с линией 18 слива, тем самым снимается противодавление из п лости 31 слива рабочего гидроцилин,ц- ра 1. В конце рабочего хода гидроцилиндра 1 подвижный элемент 4 воздей ствует на датчик 13, который посылает управляющий сигнал на перемещение гидрораспределителя 9 из позиции в позицию II и одновременно сним.а- ет управляющий сигнал с шунтирующего элемента 1 1 ,, в результате этого он возвращается пружиной 34 в исходн лю позицию 1. Перемещение гидрораспреде лителя 9 из позиции 1 в позицию II приводит к тому, что рабочим гидроци линдром становится гидроцилиндр 2, полость 33 которого сообщается лишш ми 25 и 22 связи с линией 16 высокого давления, а сливная полость 32 линиями 26 S 29 и 24 связи - с полостЁюЗ гидроцилиндра 1 и линией 17 низкого
Полость 30 гидроцилиндра 1 линиями 23 и 21 связи сообщается с линией 18 слива. Таким образом, подвижный элемент 4 и захват 6 -гид5
0 5 О
0
давления
0
гидроципиндра 2, подвижный элемент 5 которого совершает в этот момент подготовительный ход влево вместе с зах-. ватом 7. Подготовительный ход подвижного элемента 5 гидроцилиндра 2 завершится раньше окончания рабочего хода гидроцилиндра 1 за счет дополнительной подпитки полости 32 потоком жидкости из линии 17 низкого давления. В конце подготовительного хода подвижный элемент 5 воздействует на датчик 14, который посылает управляг-тий сигнал на перемещение шунтирующего элемента 11 из позиций I в позицию II, В результате этого при продолжаюш;емся рабочем ходе гид- роцнлиндра 1 его полость 31, полость. 32 гидродилиндра 2 и линия 17 низкого давления сообщаются линиями 20 и 19 связи с линией 18 слива, тем самым снимается противодавление из полости 31 слива рабочего гидроцилин,ц- ра 1. В конце рабочего хода гидроцилиндра 1 подвижный элемент 4 воздействует на датчик 13, который посылает управляющий сигнал на перемещение гидрораспределителя 9 из позиции в позицию II и одновременно сним.а- ет управляющий сигнал с шунтирующего элемента 1 1 ,, в результате этого он возвращается пружиной 34 в исходн лю позицию 1. Перемещение гидрораспределителя 9 из позиции 1 в позицию II приводит к тому, что рабочим гидроцилиндром становится гидроцилиндр 2, полость 33 которого сообщается лишш- ми 25 и 22 связи с линией 16 высоко . го давления, а сливная полость 32 линиями 26 S 29 и 24 связи - с полостЁюЗ гидроцилиндра 1 и линией 17 низкого
Полость 30 гидроцилиндра 1 линиями 23 и 21 связи сообщается с линией 18 слива. Таким образом, подвижный элемент 4 и захват 6 -гид31
роцилиндра 1 совершают подготовительный ход влево, который по причине, изложенной вьше, завершится раньше рабочего хода гидроцилинДра 2. В конце подготовительного хода подвижный элемент 4 воздействует на датчик 12, Который посылает управляющий сигнал на перемещение шунтирующего элемента 11 из позиции 1 в позицию II. В результате этого при продолжающемся рабочем ходе гидроцилиндра 2 его полость 32, полость 31 гидродилиндра 1 и линия 17 низкого давления сообщаются линиями 20 и 19 связи с линией 18 сливаjтем самым снимается противодавление из полости 32 слива рабочего гидроцилиндра 2. В конце рабочего хода гидроди- 2 подвижный элемент 5 воздей- ствует на датчик 15, который снимает управляющие сигналы с гидрораспределителя 9 и шунтиругощего элемента 11, в результате этого они возвращаются в исходные позиции 1 под воздей ствием прунин 35 и 34, После этого 1ЩКЛ работы повторяется.
Йри нахождении гидрораспределителя 10 реверса в позицию 11 машина пе ремещается вправо полостями 31 и 32 гидроцилиндров 1 и 2 аналогично позиции 1.
00
Во избежание остановки машины в процессе переключе1шя гидрораспределителя 9 сигналы от датчиков несколько опережают завершение рабочих ходов гидроцилиндрами. Время опережения является функцией быстродействия гидропривода и для конкретной машины определяется однозначно.
Формула изобретения
Механизм передвижения горной машины домкратного типа, включающий линии высокого и низкого давлений и линию слива, сообщенные с гидроцилиндрами, корпуса которых закреплены на корпусе машины, а их подвижные элементы посредством захватов связа- с малинной дорогой, датчики положений подвижных элементов гидроцилиндров, гидрораспределитель управления гидроцилиндрами и гидрораспре- делителн реверса перемещения машины, отличающийся тем, что, с целью повышения эффективности и безопасности работы, он снабжен шунтирующим элементом, через который сообщены полость слива гидроцилиндра и линия низкого давления с линией слива, а линии высокого и низкого давлений сообщены с линией слива через гидрораспределитель реверса в исходной позиции.
30 4 f /J
16
Д -y J
/33 5 г w 11 III
Шиг.2
| СПОСОБ ПРОИЗВОДСТВА СЛАБОСОЛЕНОЙ СЕЛЬДИ | 2003 |
|
RU2266657C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гидропривод домкратного типа для горной машины | 1983 |
|
SU1155749A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
