листе
00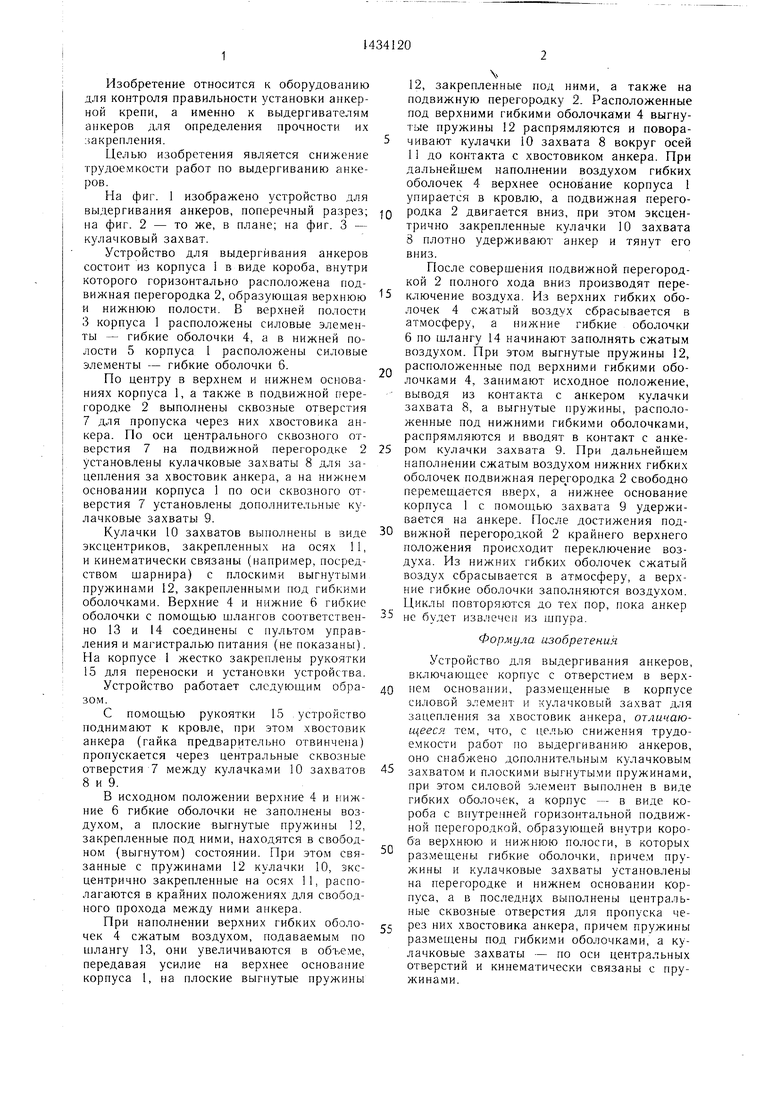
Изобретение относится к оборудованию для контроля правильности установки анкерной крепи и позволяет снизить трудоемкость работ по выдергиванию анкеров. Устройство включает коробчатый корпус (К) 1с центральным отверстием 7 и внутренней подвижной горизонтальной перегородкой (ПП) 2. Последняя образует внутри К 1 верхнюю 3 и нижнюю 5 полости. В них расположены гибкие оболочки (ГО) верхние 4 и нижние 6. Под ГО 4,6 размещены плоские выгнутые пружины, кинематически связанные с кулачковыми захватами 8 и 9, которые размещены по оси центральных отверстий 7. Устройство надевают на хвостовик анкера, пропуская его конец через центральные отверстия 7 в К 1. Путем цикличной подачи сжатого воздуха попеременно то в верхние ГО 4, то в нижние ГО 6 перемещают ПП2 то вверх (холостой ход), то вниз (рабочий ход). Происходит вытягивание анкера, пока он не будет извлечен из шпура. 3 ил. (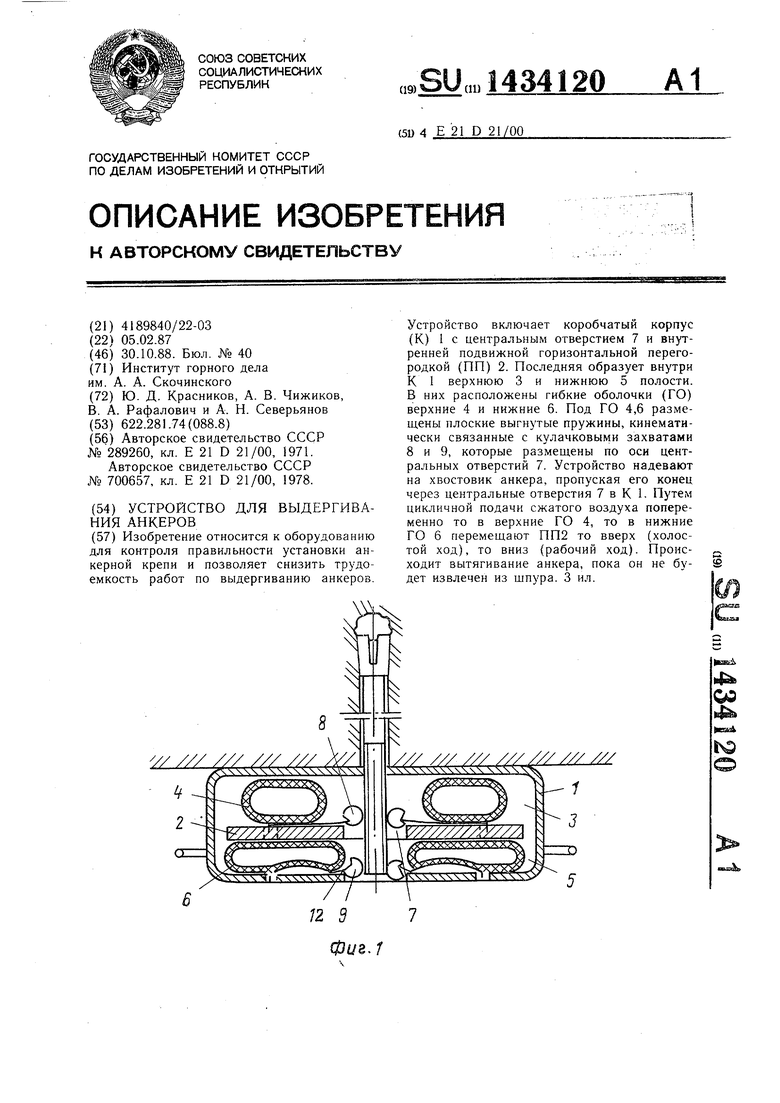
Фив. Г
12, закрепленные под ними, а также на подвижную перегородку 2. Расположенные под верхними гибкими оболочками 4 выгнутые пружины 12 распрямляются и повора- 5 чивают кулачки 10 захвата 8 вокруг осей 11 до контакта с хвостовиком анкера. При дальнейшем наполнении воздухом гибких оболочек 4 верхнее основание корпуса 1 упирается в кровлю, а подвижная перегоИзобретение относится к оборудованию для контроля правильности установки анкерной крепи, а именно к выдергивателям анкеров для определения прочности их ; акрепления.
Целью изобретения является снижение трудоемкости работ по выдергиванию анкеров.
На фиг. 1 изображено устройство для
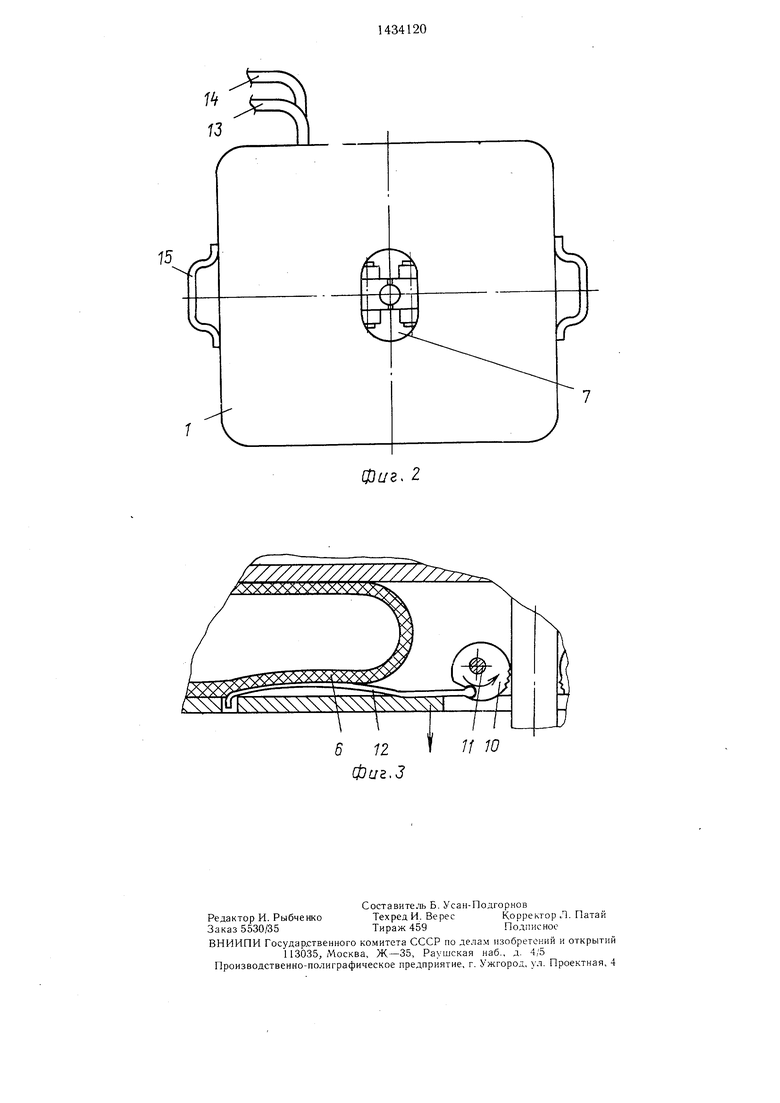
выдергивания анкеров, поперечный разрез; Q родка 2 двигается вниз, при этом эксцен- на фиг. 2 - то же, в плане; на фиг. 3 -трично закрепленные кулачки 10 захвата
кулачковый захват.
Устройство для выдергивания анкеров состоит из корпуса 1 в виде короба, внутри которого горизонтально расположена подвижная перегородка 2, образующая верхнюю 5 ключение воздуха. Из верхних гибких обо- и нижнюю полости. В верхней полостилочек 4 сжатый воздух сбрасывается в
3 корпуса 1 расположены силовые элементы - гибкие оболочки 4, а в нижней полости 5 корпуса 1 расположены силовые элементы - гибкие оболочки 6.
По центру в верхнем и нижнем основаниях корпуса 1, а также в подвижной перегородке 2 выполнены сквозные отверстия 7 для пропуска через них хвостовика анкера. По оси центрального сквозного отверстия 7 на подвижной перегородке 2 25 ром кулачки захвата 9. При дальнейшем установлены кулачковые захваты 8 для за-наполнении сжатым воздухом нижних гибких
цепления за хвостовик анкера, а на нижне.моболочек подвижная пере городка 2 свободно
основании корпуса 1 по оси сквозного от-перемещается вверх, а нижнее основание
верстия 7 установлены дополнительные ку-корпуса 1 с помощью захвата 9 удержилачковые захваты 9.вается на анкере. После достижения подКулачки 10 захватов выполнены в виде 30 вижной перегородкой 2 крайнего верхнего эксцентриков, закрепленных на осях 11,положения происходит переключение воз8 плотно удерживают анкер и тянут его вниз.
После совершения подвижной перегородкой 2 полного хода вниз производят переатмосферу, а нижние гибкие оболочки 6 по шлангу 14 начинают заполнять сжатым воздухом. При этом выгнутые пружины 12, расположенные под верхними гибкими оболочками 4, занимают исходное положение, выводя из контакта с анкером кулачки захвата 8, а выгнутые пружины, расположенные под нижними гибкими оболочками, распрямляются и вводят в контакт с анкеи кинематически связаны (например, посредством шарнира) с плоскими выгнутыми пружинами 12, закрепленными под гибкими оболочками. Верхние 4 и нижние 6 гибкие оболочки с помощью шлангов соответствен- 35 но 13 и 14 соединены с пультом управления и магистралью питания (не показаны). Па корпусе 1 жестко закреплены рукоятки 15 для переноски и установки устройства.
духа. Из нижних гибких оболочек сжатый воздух сбрасывается в атмосферу, а верхние гибкие оболочки заполняются воздухом. Пиклы повторяются до тех пор, пока анкер не будет изв.печен из шпура.
Формула изобретения
Устройство для выдергивания анкеров, включающее корпус с отверстием в верхУстройство работает следующим обра- дд нем основании, размещенные в корпусе зо.м.силовой элемент и кулачковый захват для
С помощью рукоятки 15 устройствозацепления за хвостовик анкера, отличаюподнимают к кровле, при этом хвостовикщевся тем, что, с целью снижения трудоанкера (гайка предварительно отвинчена)емкости работ по выдергиванию анкеров,
пропускается через центральные сквозныеоно снабжено дополнительным кулачковым
отверстия 7 между кулачками 10 захватов 45 захватом и плоскими выгнутыми пружинами, 8 и 9.
В исходном положении верхние 4 и нижние 6 гибкие оболочки не заполнены воздухом, а плоские выгнутые пружины 12, закрепленные под ними, находятся в свободном (выгнутом) состоянии. При этом свя- 50 занные с пружинами 12 кулачки 10, эксцентрично закрепленные на осях 11, располагаются в крайних положениях для свободного прохода между ними анкера.
При наполнении верхних гибких оболо- рез них хвостовика анкера, причем пружины чек 4 сжатым воздухом, подаваемым поразмещены под гибкими оболочками, а кушлангу 13, они увеличиваются в объеме,лачковые захваты - по оси центральнь1х
передавая усилие на верхнее основаниеотверстий и кинематически связаны с прукорпуса 1, на плоские выгнутые пружиныжинами.
при этом силовой элемент выполнен в виде гибких оболочек, а корпус - в виде короба с внутренней горизонтальной подвижной перегородкой, образующей внутри короба верхнюю и нижнюю полосги, в которых размещены гибкие оболочки, приче.м пружины и кулачковые захваты установлены на перегородке и нижнем основании корпуса, а в последних выполнены центральные сквозные отверстия для пропуска че12, закрепленные под ними, а также на подвижную перегородку 2. Расположенные под верхними гибкими оболочками 4 выгнутые пружины 12 распрямляются и повора- чивают кулачки 10 захвата 8 вокруг осей 11 до контакта с хвостовиком анкера. При дальнейшем наполнении воздухом гибких оболочек 4 верхнее основание корпуса 1 упирается в кровлю, а подвижная перегородка 2 двигается вниз, при этом эксцен- трично закрепленные кулачки 10 захвата
родка 2 двигается вниз, при этом эксцен- трично закрепленные кулачки 10 захвата
ключение воздуха. Из верхних гибких обо- лочек 4 сжатый воздух сбрасывается в
8 плотно удерживают анкер и тянут его вниз.
После совершения подвижной перегородкой 2 полного хода вниз производят переключение воздуха. Из верхних гибких обо- лочек 4 сжатый воздух сбрасывается в
ром кулачки захвата 9. При дальнейшем наполнении сжатым воздухом нижних гибких
атмосферу, а нижние гибкие оболочки 6 по шлангу 14 начинают заполнять сжатым воздухом. При этом выгнутые пружины 12, расположенные под верхними гибкими оболочками 4, занимают исходное положение, выводя из контакта с анкером кулачки захвата 8, а выгнутые пружины, расположенные под нижними гибкими оболочками, распрямляются и вводят в контакт с анке вижной перегородкой 2 крайнего верхнего положения происходит переключение воздуха. Из нижних гибких оболочек сжатый воздух сбрасывается в атмосферу, а верхние гибкие оболочки заполняются воздухом. Пиклы повторяются до тех пор, пока анкер не будет изв.печен из шпура.
Формула изобретения
Устройство для выдергивания анкеров, включающее корпус с отверстием в верх нем основании, размещенные в корпусе силовой элемент и кулачковый захват для
захватом и плоскими выгнутыми пружинами,
рез них хвостовика анкера, причем пружины размещены под гибкими оболочками, а купри этом силовой элемент выполнен в виде гибких оболочек, а корпус - в виде короба с внутренней горизонтальной подвижной перегородкой, образующей внутри короба верхнюю и нижнюю полосги, в которых размещены гибкие оболочки, приче.м пружины и кулачковые захваты установлены на перегородке и нижнем основании корпуса, а в последних выполнены центральные сквозные отверстия для пропуска че
/1
//////////////////7 Xxx
7
фиг. 2
| УСТРОЙСТВО ДЛЯ ПОДОГРЕВА ВОЗДУХА | 0 |
|
SU289260A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Выдергиватель анкеров | 1978 |
|
SU700657A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
