Изобретение относится к машиностроению и может быть использовано в различных отраслях народного хозяйства для автоматизации перегрузки листов.
Цель изобретения - повышение надеж- , ности в работе и удобства эксплуатации захвата.
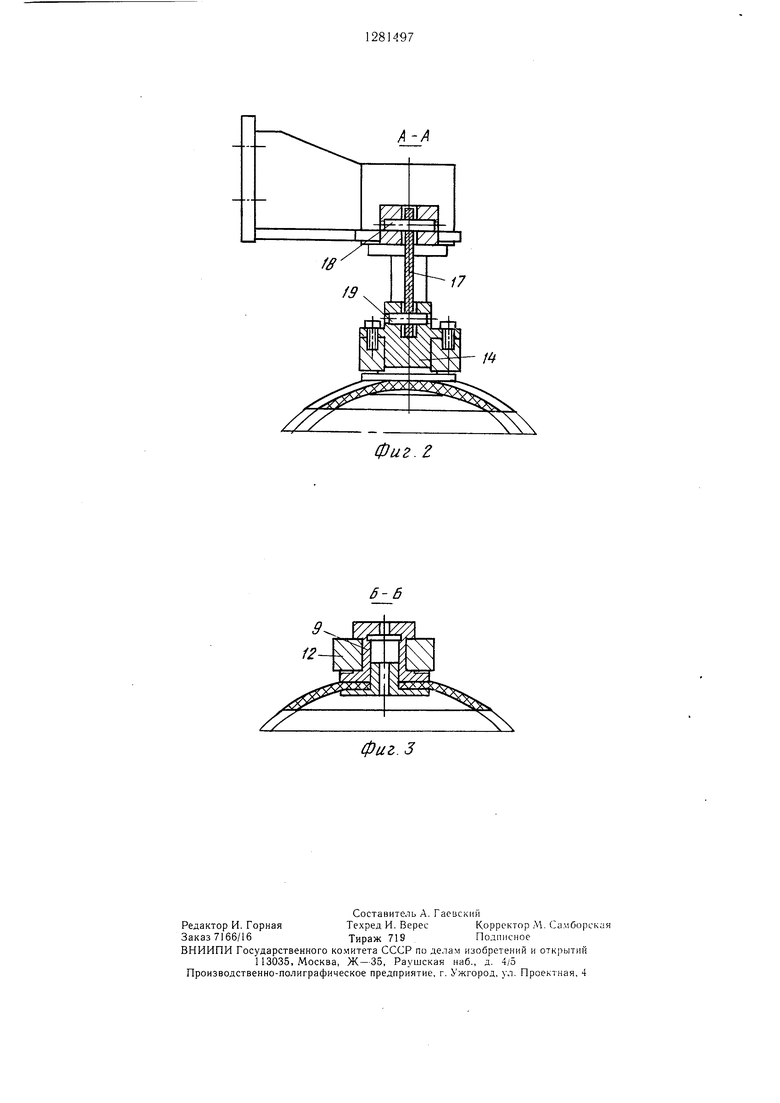
На фиг. 1 изображен предлагаемый захват, вид спереди; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1.
Вакуумный захват содержит кронштейн 1, закрепленный на транспортном агрегате, например на руке промышленного робота, траверсу 2 и присосные камеры 3.
вокруг шарниров 18 от середины захвата. Пружины 15 удерживают присосные ка.ме- ры 3 в крайнем положении. Диафрагмы 11 распределяются по поверхности захватываемой пластины.
После этого привод подъема и опускания захвата (находяш,ийся на работе) переключается на подъем. Упор 8 под действием упругих сил траверсы 2 остается на стопе пластин, а корпуса 9 с диафрагмами 11, свя- занные с траверсой 2, поднимаются, перемешаясь по пазам 13 и сжимая пружины 15, усилие которых во много раз меньше усилий удержания пластин присосками. Под диафрагмами 11 создается вакуум, они присасыВ средней части кронштейн 1 имеет бо- jj ваются к поверхности захватываемой пласти- бышку 4 с направляюш,ей втулкой 5, в ко-ны, поднимая ее.
торую вставлен шток 6, соединенный с тра-Присосные камеры 3 открывают края
версой 2 винтом 7 с упором 8. Траверса 2 выполнена в виде предварительно деформированной пластинчатой пружины, изогнутой в
20
соответствии с уравнением упругой линии и установленной так, что вогнутая сторона обращена к кронштейну 1.
Присосная камера 3 имеет корпус 9 и закрепленную на нем седлом 10 диафрагму 11.
На концах траверсы 2 закреплены обой- 25 мы 12, в которых выполнены продольные пазы 13, закрытые с концов упорами 14. В пазах 13 расположены корпуса 9 присосных камер 3. Между каждым корпусом 9 вдоль паза 13 установлена пружина 15,
верхней пластины от нижележащей и изгибают ее относительно упора 8. При этом вследствие того, что изгибы поднимаемой пластины и пластинчатой пружины траверсы соответствуют одному и тому же уравнению гибкой линии, и так как а-б, присоски всегда перпендикулярны поверхностям поднимаемой пластины.
Сдеформированная пластина отделяется от стопы, поднимается вместе с захватом и подается транспортным агрегатом на технологическое оборудование. Отделение пластины от захвата в рабочей зоне технологического оборудования осуществляется
отжимающая присосные камеры 3 от цент- 30 открытием доступа атмосферного воздуха в
ра захвата.
Расстояние а между поверхностью траверсы 2 и дном присоски (плоскостью 16 седла lOj равно расстоянию 6 между той же поверхностью траверсы и точкой опоры упора 8.
Кронштейн 1 соединен с траверсой 2 тягами 17 и шарнирами 18 и 19.
Вакуумные камеры могут быть соединены трубками (не показаны) либо с источником вакуума в случае использования камер о шарнирно соединенные одни.ми концами с
с принудительным отсосом воздуха, либо с клапаном открытия доступа воздуха в камеры для разгрузки захвата от заготовки после подачи ее на технологическое оборудование.
кронштейном, и присосные камеры, смонтированные на концах траверсы, отличающийся тем, что, с целью повышения надежности в работе и удобства эксплуатации, траверса выполнена в виде выгнутой вниз в средкронштейном, и присосные камеры, смонтированные на концах траверсы, отличающийся тем, что, с целью повышения надежности в работе и удобства эксплуатации, траверса выполнена в виде выгнутой вниз в средУстройство работает следующим обра- 45 ней части пластинчатой пружины, а захват
снабжен закрепленными на концах пружины обоймами, в которых подвижно установлены присосные камеры, подпружиненные относительно них в направлении от упора, при этом вторые концы тяг шарнирно соединены с обоймами, причем упор расположен от нижней поверхности траверсы на расстоянии, равном расстоянию от основания присоса до упомянутой поверхности траверсы.
зом.
Используют камеры с принудительным вакуумированием. Захват опускается рукой манипулятора (не показана) на стопу заготовок (пластин). При этом вначале со стопой контактирует упор 8. При дальнейшем опускании захвата траверса 2 распрямляется, и шток 6 перемещается по направляющей втулке 5. Тяги 17 разворачиваются
50
вокруг шарниров 18 от середины захвата. Пружины 15 удерживают присосные ка.ме- ры 3 в крайнем положении. Диафрагмы 11 распределяются по поверхности захватываемой пластины.
После этого привод подъема и опускания захвата (находяш,ийся на работе) переключается на подъем. Упор 8 под действием упругих сил траверсы 2 остается на стопе пластин, а корпуса 9 с диафрагмами 11, свя- занные с траверсой 2, поднимаются, перемешаясь по пазам 13 и сжимая пружины 15, усилие которых во много раз меньше усилий удержания пластин присосками. Под диафрагмами 11 создается вакуум, они присасыверхней пластины от нижележащей и изгибают ее относительно упора 8. При этом вследствие того, что изгибы поднимаемой пластины и пластинчатой пружины траверсы соответствуют одному и тому же уравнению гибкой линии, и так как а-б, присоски всегда перпендикулярны поверхностям поднимаемой пластины.
Сдеформированная пластина отделяется от стопы, поднимается вместе с захватом и подается транспортным агрегатом на технологическое оборудование. Отделение пластины от захвата в рабочей зоне технологического оборудования осуществляется
камеры 3. После освобождения захвата от пластины пружины 15 возвращают присосные камеры 3 в исходное положение.
35Формула изобретения
Вакуумный захват, содержащий установленную подвижно относительно кронштейна траверсу с упором в средней части, тяги.
кронштейном, и присосные камеры, смонтированные на концах траверсы, отличающийся тем, что, с целью повышения надежности в работе и удобства эксплуатации, траверса выполнена в виде выгнутой вниз в сред ней части пластинчатой пружины, а захват
/77
К-А
Х
фиг. г
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| Регулятор натяжения движущегося материала | 1989 |
|
SU1712294A1 |
| Вакуумное захватное устройство | 1981 |
|
SU1036657A1 |
| Противоподсосный клапан вакуумного грузозахватного устройства | 1984 |
|
SU1162725A1 |
| Устройство для подачи плоских заготовок в зону обработки | 1986 |
|
SU1323183A1 |
| Вакуумный захват | 1980 |
|
SU897691A1 |
| Устройство для поштучного отделения плоских заготовок от стопы | 1988 |
|
SU1569062A1 |
| Устройство для захвата листового материала | 1987 |
|
SU1498688A1 |
| Устройство для отделения от стопы листовых заготовок и подачи их в зону обработки | 1983 |
|
SU1087232A1 |
| Устройство для подачи изделий | 1978 |
|
SU1057385A2 |
Изобретение относится к области подъегино-транспортной техники, в частности к вакуумным захватам. Целью изобретения 1В.ляется riOBbiLuefuie надежности в работе и )-добства эксплуатации. Вакуумный зах- зат содержит кронштейн 1, траверсу, представляющую собой выгнутую вниз пластинчатую пружину 2. На конпах пружины посредством обойм 12 закреплены присосные камеры 3. Кронштейн и пружину соединяет упор 6. Захват О |ускают на стопу изделий. Упор контактирует с верхним изделием. Пружина распрямляется, присосные камеры захватывают верхнее изделие, деформируют и отделяют от стопы. Отделение изделия от захвата осушеетвляется открытием доетупа атмосферного воздуха в присосные камеры. 3 пл/ (Л 17 J Ю 00 СО Фиг.1
фаг.З
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
