4i
09
4;а
о
00
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЬНОГО КАНАЛА | 1992 |
|
RU2010295C1 |
| Устройство для компенсации погрешностей измерительного канала | 1987 |
|
SU1543386A1 |
| Устройство для компенсации погрешности измерения и диагностического контроля измерительного канала | 1982 |
|
SU1070514A1 |
| Устройство для компенсации погрешностей измерительного канала | 1989 |
|
SU1755257A1 |
| Комплексное устройство контроля параметров | 1988 |
|
SU1520482A1 |
| Имитатор измерительного радиоприемного устройства | 1983 |
|
SU1115070A1 |
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
| Тензометрическое устройство | 1991 |
|
SU1796890A1 |
| Устройство для моделирования одноканальной системы передачи информации с импульсно-кодовой модуляцией | 1988 |
|
SU1578719A1 |
| Следящий аналого-цифровой преобразователь | 1985 |
|
SU1361713A1 |
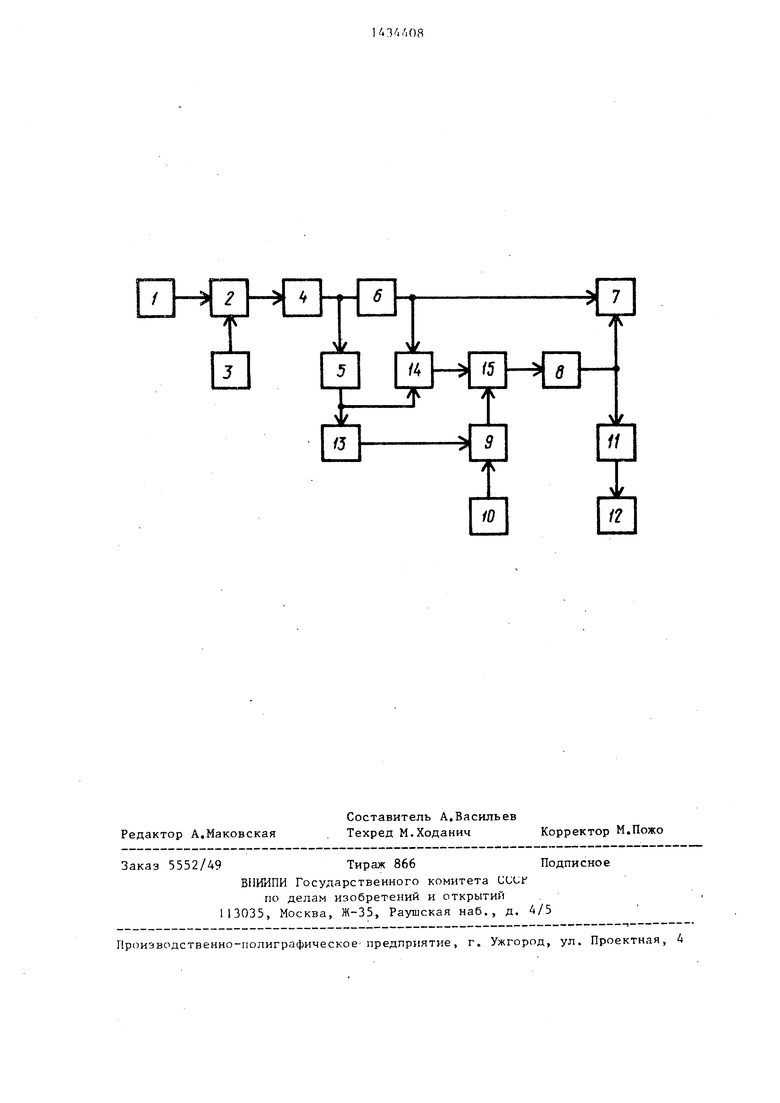
Изобретение относится к автоматике и контрольно-измерительной технике и может быть использовано для компенсации погрешности, вносимой измерительными каналами, в многоканальных системах передачи информации. Целью изобретения является повышение точности устройства. Устройство содержит датчик 1 измеряемой величины, второй сумматор 2, генератор 3 образцового сигнала, измерительный канал 4, второй 5 и первый 6 фильтры, первый сумматор 7, инвертор 8, блок 9 вычитания, блок 10 формирования сигнала задания, пороговый блок 11, блок 12 сигнализации, «лок 13 вычисления среднего значения и блоки деления 14 и умножения 15,1 ил.
NJ
Изобретение относится к автоматике, может бы,ть использовано для компенсации погрешности, вносимой изме- рительныьга каналами, в многоканальны системах передачи информации и является дополнительным к авт.св, № 1070514.
Цель изобретения повышение точности устройства.
На чертеже приведена блок-схема описываемого устройства.
Устройство содержит датчик 1 измеряемой величины, второй сумматор 2, генератор 3 образцового сигнала, измерительный канал 4, второй 5 и первый 6 фильтры, первый сумматор 7, инвертор 8, блок 9 вычитания, блок 10 формирования сигнала задания, по- poroBbrti блок 11, блок 12 сигнализации, блок 13 вычисления среднего значения и блоки деления 14 и умножения 15.
Устройство работает следующим об- 25 разом в
Переменный сигнал х с датчика 1 поступает на вход сумматора 2, где он суммируется с образцовым сигналом а с генератора 3. Образцовый сигнал частоту выше частоты передаваемого сигнала, но нихе граничной частоты измерительного канала Д С/м- марный сигнал (х -ь а) поступает в измерительный канал 4, который вносит погрешность в передаваемую информацию, и на его выходе будет сигнал ( а) + (KO + i х), где k - номинальный коэффициент переда30
35
С учетом изменения угла наклона передаточной характеристики измерительного канала можно записать следующее соотношение для контролируемого X и образцового а сигналов:
X
а
k(,a + Л а
п,
откуда следь ет, что их
da
а
40
пла,
Таким образом, на выходе сумматора 7 имеем сигнал, равный kjjX + + Jx - п/1а kgx; в результате погрешность, вносимая измерительным каналом, будет скомпенсирована более точно, чем в известном устройстве. Формула изобретения
Устройство для к омпенсации погрешности измерения и диагностического контроля измерительного канала по авт.св. № 1070514, отличающееся тем, что, с целью повычи канала; Лай Лх - погрешности5 вносимые измерительным каналом в передаваемый и образцовый сигналы соответственно. Далее сигнал поступает на входы первого б и второго 5
фильтров. Полоса пропускания фильтра 45 шения точности устройства, в него
5 определяется частотой образцовоговведены блоки деления и умножения,
сигнала. Фильтр 6 - широкополосный,причем входы делимого и делителя блополоса пропускания которого меньшека деления подключены к выходам перчастоты образцового сигнала. С выхо-вого и второго фильтров соответствен- дов фильтров 5 и 6 медленно меняющие-gQ но, а выход подключен к первому вхося во времени сигналы + ла иду блока умножения, второй вход котоkgX + dx соответственно подаются нарого подключен к выходу блока вычивходы блока 14, где вьмиспяется ко-тания, а ВЕ.1Ход блока умножения подэффициент п;, ключей к входу инвертора.
- kgX
+ /1 а
0
5
0
5
сигнал kj,a
Одновременно с выхода фильтра 5
+ А& подается на вход блока 13, где происходит усреднение значения + Ла, Усредненный сигнал поступает на первый вход блока 9 вычитания, на второй вход которого подается сигнал с блока 10 формирования сигнала задания о Разност- ньм сигнал, равный значению погрешности а, поступает на второй вход блока 15 умножения, на первый вход которого подается численное значение коэффициента п с блока 14, Сигнал пЛа с выхода блока 15 поступает через инвертор 8 на вход сумматора 7, на второй вход которого пода- .ется сигнал с выхода фильтра 6,равный + х,
С учетом изменения угла наклона передаточной характеристики измерительного канала можно записать следующее соотношение для контролируемого X и образцового а сигналов:
k(,a + Л а
п,
30
откуда следь ет, что их
da
а
пла,
Таким образом, на выходе сумматора 7 имеем сигнал, равный kjjX + + Jx - п/1а kgx; в результате погрешность, вносимая измерительным каналом, будет скомпенсирована более точно, чем в известном устройстве. Формула изобретения
Устройство для к омпенсации погрешности измерения и диагностического контроля измерительного канала по авт.св. № 1070514, отличающееся тем, что, с целью повышения точности устройства, в него
К
/3
/4
15
в
11
W
12
| Устройство для компенсации погрешности измерения и диагностического контроля измерительного канала | 1982 |
|
SU1070514A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
