Изобретение относится к автоматике и может быть использовано для компенсации погрешностей, вносимых измерительным каналом,в многоканаль- ных системах передачи информации.
Цель изобретения - повышение точности устройства.
На фиг. 1 и 2 приведена передаточная характеристика измерительного канала; на фиг.З - структурная электрическая схема устройства для компенсации погрешностей измерительного канала.
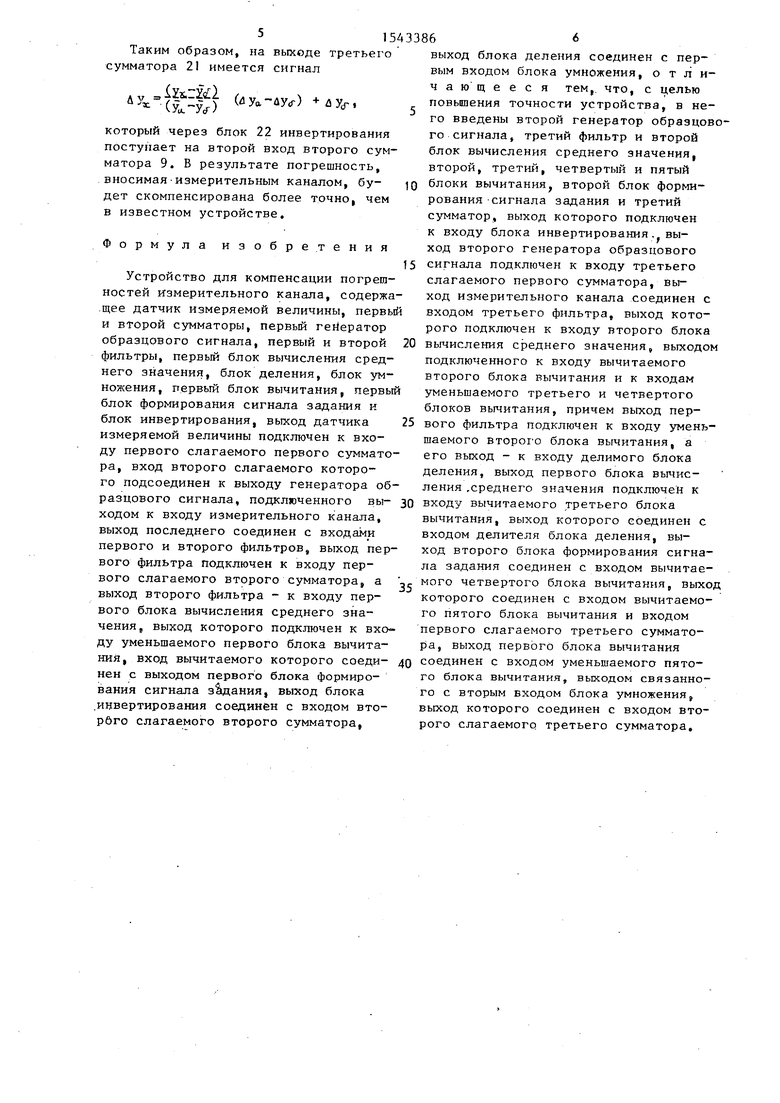
Устройство для компенсации погреш- ностей измерительного канала содержит (фиг.З) датчик 1 измеряемой величины, первый сумматор 2, первый 3 и второй 4 генераторы образцового сигнала, измерительный канал 5, первый 6, вто- рой 7 и третий 8 фильтры, второй сумматор 9, первый 10 и второй 11 блоки вычисления среднего значения, второй 12, третий 13, четвертый 14, пятый 15 и первый 16 блоки вычитания, блок 17 деления, блок 18 умножения, первый 19 и второй 20 блоки формирования сигнала задания, третий сумматор 21, блок 22 инвертирования.
Устройство для компенсации погрега- ностей измерительного канала работает следующим образом.
Передаваемый сигнал с переменной амплитудой х с выхода датчика 1 по-. Ступает на вход первого сумматора 2, где суммируется с образцовым сигналом имеющим амплитуду а, который поступает с первого генератора 3 образцового сигнала, и с образцовым сигналом, имеющим амплитуду б, который пост} - пает с второго генератора 4 образцового сигнала. Образцовые сигналы имеют частоту выше частоты передаваемого сигнала, но ниже.частоты измерительного канала 5, причем амплитуды .
Суммарный сигнал поступает в измерительный канал 5, который имеет номинальный коэффициент передачи К/. В измерительном канале 5 вследствие смещения передаточной характеристики (фиг,1) на величину К,, а также изменения ее угла наклона 4 (фиг.2) появляется погрешность коэффициента передачи /jKf. Эти изменения переда- точной характеристики измерительного канала вносят погрешность в передаваемую информацию. Амплитуда первого образцового сигнала на выходе измерительного канала 5 при этом принимает значение уа (К )К, ) а+К„, а амплитуда второго образцового сигнала }у (К,-МК,).б+Кд. Амплитуда передаваемого сигнала будет ух (К7+и К t ) ,х+К, . С выхода измерительного канала 5 сигнал поступает на входы первого 6, второго 7 и третьего 8 фильтров. Полосы пропускания второго 7 и третьего 8 фильтров определяются частотой образцовых сигналов, а первый фильтр 6 представляет собой широкополосный фильтр, полоса пропускания которого меньше частот образцовых сигналов. С выхода первого фильтра 6 сигнал ух поступает на уменьшаемый вход первого блока 16 вычитания и на первый вход сумматора 9. С выходов второго 7 и третьего 8 фильтров медленно меняющиеся во времени сигналы уа и у подаются соответственно на входы блоков 10 и 11 вычисления средних значений, где происходит усреднение этих сигналов. Усредненный сигнал у поступает на уменьшаемые входы первого 16 и третьего 13 блоков вычитания, а усредненны сигнал yf - на вычитаемый вход второго блока 12 вычитания и на уменьшаемый вход четвертого блока 14 вычитания. На делимый вход блока 17 деления поступает разностный сигнал, равный , с выхода второго блока вычитания, а на его делительный поступает разностный сигнал, равный Уа-у, с выхода третьего блока 13 вычитания и результат деления подается на первий
вход блока 18 умножения.
i
Одновременно на вычитаемый вход первого блока 16 вычитания поступает сигнал с выхода, первого блока 19 формирования сигнала задания, равный К,-а. С выхода первого блока 16 вычитания сигнал, равный и по ступает на уменьшаемый вход пятого блока 15 вычитания. На вычитаемый вход четвертого блока 14 вычитания поступает сигнал с выхода второго блока 20 формирования сигнала задания, равный . С выхода четвертого блока
14вычитания сигнал Л y6j-К б поступает на вычитаемый вход пятого блока
15вычитания и на первый вход третьего сумматора 21. Разностный сигнал, равный ,г, поступает на второй вход блока 18 умножения, сигнал с выхода которого поступает на второй вход третьего сумматора 21,
Таким образом, на выходе третьего сумматора 21 имеется сигнал
Л УХ () (й У -ЛУ + .
который через блок 22 инвертирования поступает на второй вход второго сумматора 9. В результате погрешность, вносимая измерительным каналом, будет скомпенсирована более точно, чем в известном устройстве.
Формула изобретения
15 сигнала подключен к входу третьего слагаемого первого сумматора, выход измерительного канала соединен с входом третьего фильтра, выход которого подключен к входу второго блока
Устройство для компенсации погрешностей измерительного канала, содержащее датчик измеряемой величины, первый и второй сумматоры, первый генератор образцового сигнала, первый и второй 20 вычисления среднего значения, выходом фильтры, первый блок пычисления сред- подключенного к входу вычитаемого него значения, блок деления, блок умножения, первый блок вычитания, первый блок формирования сигнала задания и блок инвертирования, выход датчика 25 вого фильтра подключен к входу умень- измеряемой величины подключен к вхо- шаемого второго блока вычитания, а ду первого слагаемого первого сумматора, вход второго слагаемого которого подсоединен к выходу генератора обрторого блока вычитания и к входам уменьшаемого третьего и четвертого блоков вычитания, причем выход перего выход - к входу делимого блока деления, выход первого блока вычисления .среднего значения подключен к
выход блока деления соединен с пер- РЫМ входом блока умножения, отличающееся тем, что, с целью повышения точности устройства, в него введены второй генератор образцового сигнала, третий фильтр и второй блок вычисления среднего значения, второй, третий, четвертый и пятый
блоки вычитания, второй блок формирования сигнала задания и третий сумматор, выход которого подключен к входу блока инвертирования.fвыход второго генератора образцового
сигнала подключен к входу третьего слагаемого первого сумматора, выход измерительного канала соединен с входом третьего фильтра, выход которого подключен к входу второго блока
вычисления среднего значения, выходом подключенного к входу вычитаемого вого фильтра подключен к входу умень- шаемого второго блока вычитания, а
вычисления среднего значения, выходо подключенного к входу вычитаемого вого фильтра подключен к входу умень шаемого второго блока вычитания, а
рторого блока вычитания и к входам уменьшаемого третьего и четвертого блоков вычитания, причем выход первычисления среднего значения, выходо подключенного к входу вычитаемого вого фильтра подключен к входу умень шаемого второго блока вычитания, а
его выход - к входу делимого блока деления, выход первого блока вычисления .среднего значения подключен к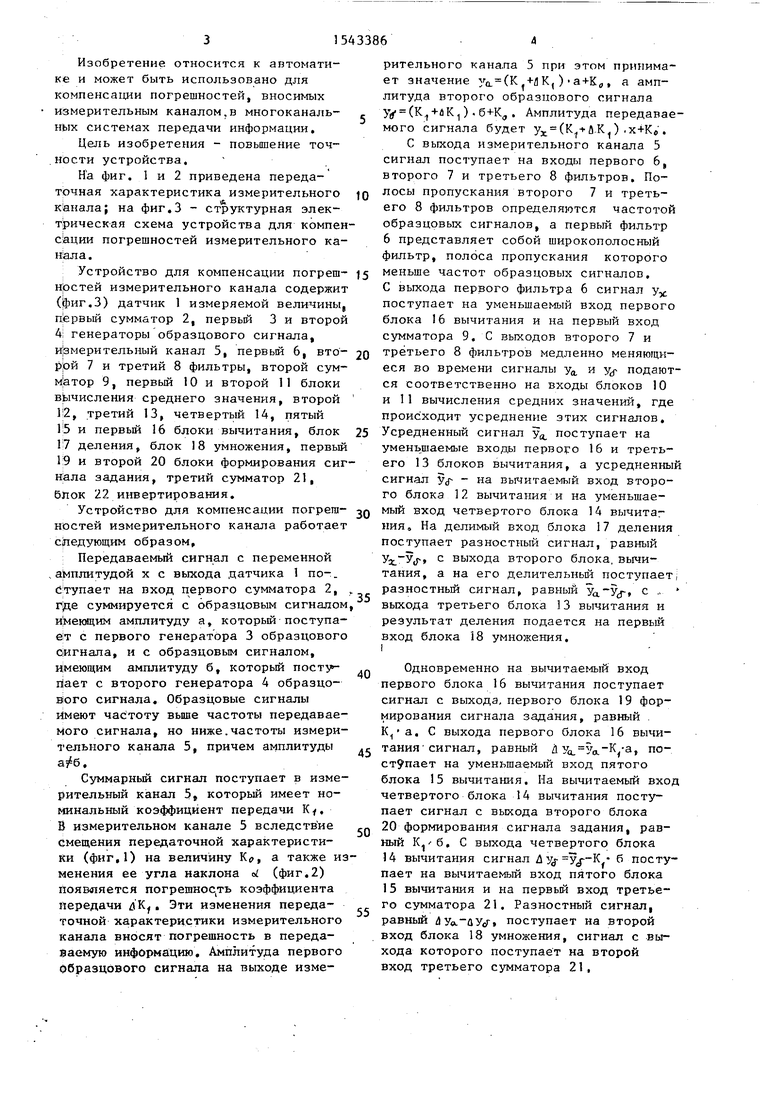
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЬНОГО КАНАЛА | 1992 |
|
RU2010295C1 |
| Устройство для компенсации погрешности измерения и диагностического контроля измерительного канала | 1986 |
|
SU1434408A2 |
| Устройство для компенсации погрешностей измерительного канала | 1989 |
|
SU1755257A1 |
| Комплексное устройство контроля параметров | 1988 |
|
SU1520482A1 |
| Устройство для компенсации погрешности измерения и диагностического контроля измерительного канала | 1982 |
|
SU1070514A1 |
| Устройство для вычисления координат одномерного раскроя линейных неоднородных материалов | 1985 |
|
SU1312604A1 |
| Устройство для вычисления функции арктангенса | 1985 |
|
SU1273920A1 |
| АДАПТИВНЫЙ ВРЕМЕННОЙ ДИСКРЕТИЗАТОР | 2015 |
|
RU2583707C1 |
| Система управления вибростендом | 1984 |
|
SU1275396A1 |
| Адаптивный прогнозатор производственных показателей | 1989 |
|
SU1658175A1 |

Изобретение относится к автоматике, может быть использовано для компенсации погрешностей, вносимых измерительным каналом, в многоканальных системах передачи информации. Цель изобретения - повышение точности устройства. Устройство для компенсации погрешностей измерительного канала содержит датчик 1 измеряемой величины, сумматоры 2, 9, 21, генераторы 3, 4 образцового сигнала, измерительный канал 5, фильтры 6-8, блоки 12-16 вычитания, блок 17 деления, блок 18 умножения, блоки 19, 20 формирования сигнала задания, блок 22 инвертирования. На выходе сумматора 21 имеется сигнал, который через блок 22 инвертирования поступает на второй вход сумматора 9. В результате погрешность, вносимая измерительным каналом, компенсируется более точно. 3 ил.
разцового сигнала, подключенного вы- 30 входу вычитаемого третьего блока
ходом к входу измерительного канала, выход последнего соединен с входами первого и второго фильтров, выход первого фильтра подключен к входу первого слагаемого второго сумматора, а, мого четвертого блока вычитания, выход
выход второго фильтра - к входу пер-которого соединен с входом вычитпемового блока вычисления среднего зна-го пятого блока вычитания и входом чения, выход которого подключен к вхо- первого слагаемого третьего сумматоду уменьшаемого первого блока вычита-ра, выход первого блока вычитания
ния, вход вычитаемого которого соеди-40 соединен с входом уменьшаемого пятонен с выходом первого блока формиро-го блока вычитания, выходом связаннования сигнала задания, выход блокаго с вторым входом блока умножения,
инвертирования соединен с входом вто-выход которого соединен с входом вторбго слагаемого второго сумматора,рого слагаемого третьего сумматора.
вычитания, выход которого соединен с входом делителя блока деления, выход второго блока формирования сигнала задания соединен с входом вычитагФие. 1
Фиг.г
Составитель Н.Релинкова Редактор Е.Копча Техред М.Ходаинч Корректор Э.Лончакова
Заказ 400
Тираж 658
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Подписное
| Устройство для компенсации погрешности измерения и диагностического контроля измерительного канала | 1982 |
|
SU1070514A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для компенсации погрешности измерения и диагностического контроля измерительного канала | 1986 |
|
SU1434408A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
