(Л
4
СО
ф
щегося объекта. Опрос фотоприемных элементов 15 осуществляется подключением концентрических адресных шин 16 к генератору 7 развертки. Скорость опроса варьируется генератором 1, При совпадении скорости развертки со скоростьщ перемещения изображе-. ния объекта по поверхности матрицы 3 в радиальных шинах 1 появляется постоянный сигнал, которьй выделяется фильтрами 4 и индикаторами 5 нулевого уровня и используется для подключения генератора 7 развертки через
коммутатор 8 к вычислителю 9 скорости. Одновременно этот же сигнал поступает на входы дешифратора, в котором местоположение радиальных шин 17 преобразуется в код и к полученному значению кода- в блоке введения поправки прибавляется поправка, усредненное значение которой вычисляется в сумматоре в виде половинного числа радиальных шин, в которых одновременно совпадают скорость развертки и скорость перемещения изображения объекта. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости и направления движения | 1982 |
|
SU1083117A1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| СТЕРЕОСКОПИЧЕСКИЙ КОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2016 |
|
RU2627550C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ | 1991 |
|
RU2042113C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| Устройство для считывания изображений микрообъектов | 1983 |
|
SU1160450A1 |
| Устройство для селекции элементов контурного изображения | 1984 |
|
SU1168978A1 |
| Формирователь кодов радиально-круговой развертки для индикатора кругового обзора | 1985 |
|
SU1255975A2 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЦЕЛЕЙ НА ЭКРАНЕ ИНДИКАТОРА | 1988 |
|
SU1841101A1 |

Изобретение относится к измерительной технике, а именно к оптико- электронным устройствам для измерения скорости и направления перемещения объекта. Цель изобретения - повышение точности определения направления перемещения объекта. Определение направления перемещения объекта производится по фотоприемной матрице 3 с радиально-круговой структурой на приемную поверхность которой про- ектируется изображение перемещаю
; , 1
Изобретение относится к измерительной технике, а именно к устройствам для измерения скорости и направления движения объектов с исполь- зованием оптико-электронных средств. Цель изобретения - повьшение точности определения направления пере- йещения объекта.
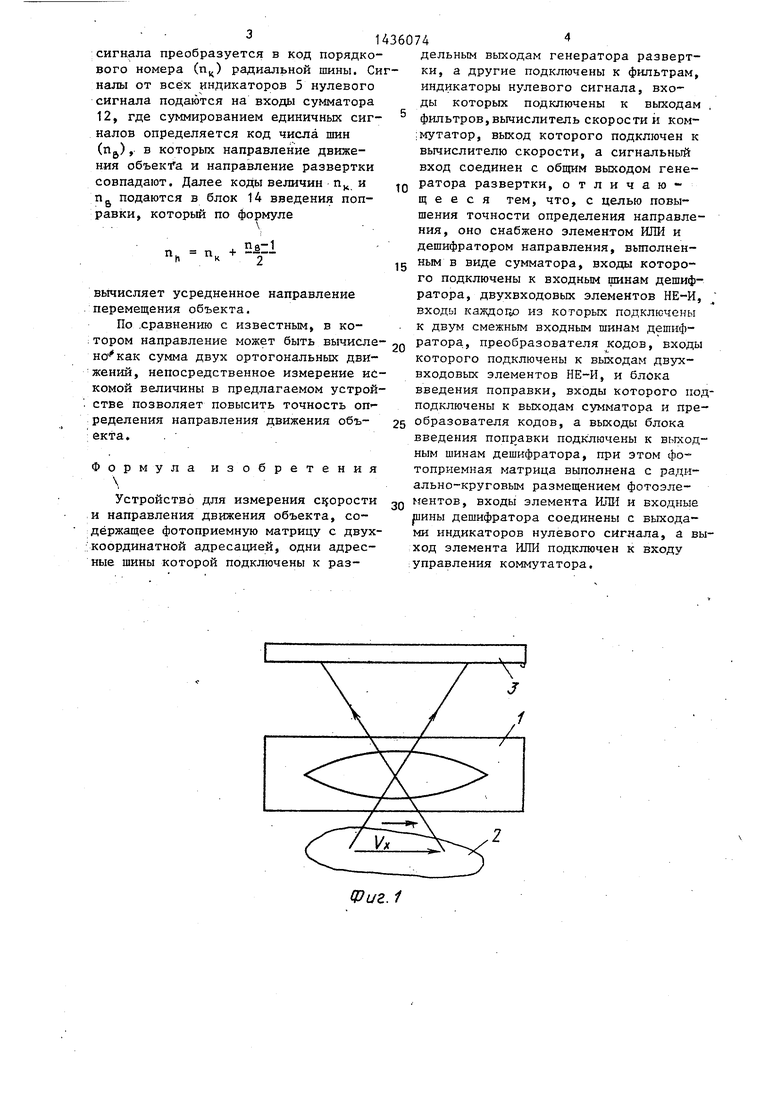
На фиг. t изображена оптическая схема устройства; на фиг. 2 - структурная схема устройства; на фиг. 3 - структурная схема дешифратора направления
Устройство содержит оптическую систему 1, проектирующую изображение объекта 2 на фотоприемную матрицу 3, ряд фильтров 4 ряд индикаторов 5 нулевого сигнала, элемент 6 ИЛИ, генератор 7 развертки, комму- татор 8, вычислитель 9 скорости и блок дешифратора 10 направления.Дешифратор 10 направления содер- toiT ряд элементов 11 НЕ-И , сумматор 12, преобразователь 13 кода и блок 1 введения поправки.
Фотоприемная матрица 3 выполнена с радикал:гьно-круговым размещением фо точувствительных элементов 15, соединенных с концентрическими и ради- .альными пшнами 16 и 17 соответственно. Концентрические шины 16 подключены к раздельным выходам генератора 7 развертки. Радиальные шины 17 подключены к фильтрам 4.
Устройство работает следующим образом.
Изображение поверхности объекта 2 оптической системой 1 проектируется на матрицу 3, при этом изображе- ние должно проейтироваться в центральную область матрицы и занимать всю или большую часть поверхности матрицы 3. Генератором 7 развертки последовательно опрашиваются фотсчувстви- тельиые.элементы 15.матрицы 3 во всех радиальных шинах 17. За время , развертки последовательно опрашиваются, все элементы 15 радиальной строки. Длительность опроса каждого фоточувствительного элемента 15 монотонно меняется от максимального до минимального значения,
При совцадении направления опроса в радиальной строке и направлении движения изображения на нескольких соседних элементах 15. одной .или нес- кольких Ешн, Б которых направление опроса совпадает с направлением перемещения объекта, появляется постоянный сигнал, который выделяется фильтром.4 и обнаруживается индикатором 5 нулевого уровня. Сигналой ин дш сатора 5 нулевого уровня через элемент ИЛИ коммутатор 8 генератор 7 развертки подключается к вычислителю 9 скорости, где по длительности импульсов опроса вычисляется и усредняется величина измеряемой скорости движения объекта 2,
Одновременно на одном из элементов НЕ-И 11, на вход НЕ которого от индикатора 5 поступает нулевой сигнал, а на вход И от. смежного индикатора - единичный, появляется сигнал, поступающий на входы преобразователя 13 кодов, где местоположение
сигнала преобразуется в код порядкового номера (п) радиальной шины. Синалы от всех индикаторов 5 нулевого сигнала подаются на входы сумматора 12, где суммированием единичных сигналов определяется код числа шин (Пц), в которых направление движения объект а и направление развертки совпадают. Далее коды величин п и Пц подаются в блок 14 введения поправки, который по формуле
п.
п,
+ SjBll 2
вычисляет усредненное направление перемещения объекта.
По .сравнению с известным, в ко;тором направление может быть вычислено как сумма двух ортогональных дви жений, непосредственное измерение искомой величины в предлагаемом устройстве позволяет повысить точность ОП
ределения направления движения объ- екта.
Формула изобретения
Устройство для измерения С15орости и направления движения объекта, содержащее фотоприемную матрицу с двух- :координатной адресацией, одни адресные шины которой подключены к раздельным выходам генератора развертки, а другие подключены к фильтрам.
5
0
О
индикаторы нулевого сигнала, входы которых подключены к выходам фильтров,вычислитель скорости и ком- :мутатор, выход которого подключен к вычислителю скорости, а сигнальный вход соединен с общим выходом генератора развертки, отличающееся тем, что, с целью повышения точности определения направления, оно снабжено элементом ИЛИ и дешифратором направления, вьтолнен- ным в виде сумматора, входы которого подключены к входным шинам дешифратора, двухвходовых элементов НЕ-И, входы каждо11о из которых подключены к двум смежным входным шинам дешифратора, преобразователя кодов, входы которого подключены к выходам двухвходовых элементов НЕ-И, и блока введения поправки, входы которого под- подключены к выходам сумматора и пре5 образователя кодов, а выходы блока введения подключены к выходным шинам дешифратора, при этом фотоприемная матрица выполнена с ради- ально-круговым размещением фотоэлеQ ментов, входы элемента ИЛИ и входные рины дешифратора соединены с выходами индикаторов нулевого сигнала, а выход элемента ИЛИ подключен к входу ;управления коммутатора.
-vJ
J
Фиг. i
Г
/с
.„ Фае.З
«.J.
| Способ измерения скорости и направления движения полосы | 1977 |
|
SU661337A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения скорости и направления движения | 1982 |
|
SU1083117A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
